
قد تكون هناك حالات تريد فيها تحريك جسم مسافة أطول من طول شوط المشغل. يمكنك تحقيق ذلك باستخدام مشغل تلسكوبي، أو يمكنك استغلال فيزياء الرافعة الميكانيكية لصالحك. من الأمثلة الشائعة على ذلك منضدة المقص (Scissor Lift) أو ما فعله صديقنا مايك سينا، مُبتكر روبوت وول-إي، في مشروعه فتّاح باب حظيرة الدجاج الأوتوماتيكي DIY.
الرافعة الميكانيكية
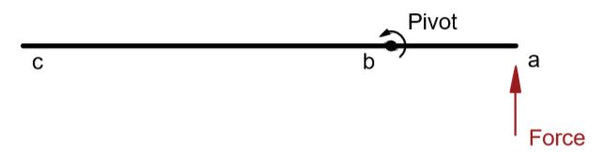
تعتمد الفيزياء وراء هذه التطبيقات على نسبة المسافات من نقطة الارتكاز على كل جانب. كما ترى في الشكل 1، يتم تثبيت المشغل عند النقطة ‘a’ مع محور ارتكاز ثابت عند النقطة ‘b’. بأخذ نسبة ‘B’ إلى ‘A’، تحصل على نسبة ‘R’. هذا يعني أن النقطة ‘c’ ستدور بمقدار ‘R’ مرات أكثر من طول شوط المشغل. ومع ذلك، سيزيد هذا من مقدار القوة المطلوبة من المشغل وسرعة دوران النقطة ‘c’ بمقدار ‘R’ مرات. هذا هو المبدأ وراء كيفية الاستفادة من مشغل خطي بالاستناد إلى طول شوطه ومكان تثبيته.
فتّاح باب حظيرة الدجاج الأوتوماتيكي DIY
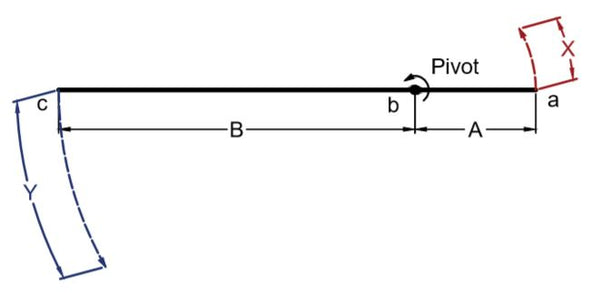
تستخدم تطبيقات مايك سينا المبدأ نفسه المذكور أعلاه وتقدم مثالاً رائعاً على إضافة عنصر آخر لتحويل دوران النقطة ‘c’ إلى حركة خطية. يمكنك رؤية العضو العلوي في الشكل 2 وهو يدور حول نقطة الارتكاز بينما يدفع المشغل عند النقطة ‘a’.
الشكل 2: العضو العلوي يدور حول محور ارتكاز عند النقطة b
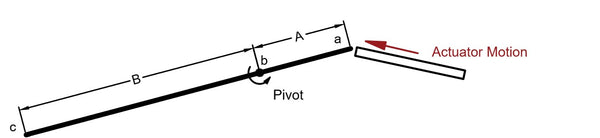
كان مايك يعلم أنه يحتاج لفتح باب حظيرة الدجاج حوالى 18 inches. ولجعل النسبة ‘R’ تساوي ثلاثة لضمان أن تسافر النقطة ‘c’ مسافة 18 inches مع شوط بطول 6 بوصات، وضع نقطة الارتكاز على بعد ثلاثة أرباع الطريق نحو النقطة ‘a’ (الشكل 3). وقد فعل ذلك من خلال وضع الذراع بحيث يكون هناك 3.5 inches على جانب واحد من نقطة الارتكاز و10.5 inches (3.5 inches × 3) على الجانب الآخر.
الشكل 3: العضو العلوي يدور حول محور ارتكاز عند النقطة b مع الأبعاد
بعد ذلك، أضاف مايك عنصراً آخر لتحويل الحركة الدورانية إلى حركة خطية. ويشرح قائلاً: “كانت حلولي إضافة ذراع أخرى هدفها التعويض عن القوس، إذ يتحرك أحد الطرفين على قوس بينما يتكيف الطرف الآخر مع حركة خطية.” الشكل 4 هو مخطط لمشروع فتّاح باب حظيرة الدجاج الأوتوماتيكي DIY الخاص به يُظهر الأوضاع المختلفة أثناء الحركة. لاحظ أن سرعة باب الحظيرة والقوة التي يطبقها المشغل ستتغيران عبر مدى الحركة. وأصبح الأمر مسألة ضبط التموضع للوصول إلى حركة الباب المطلوبة.
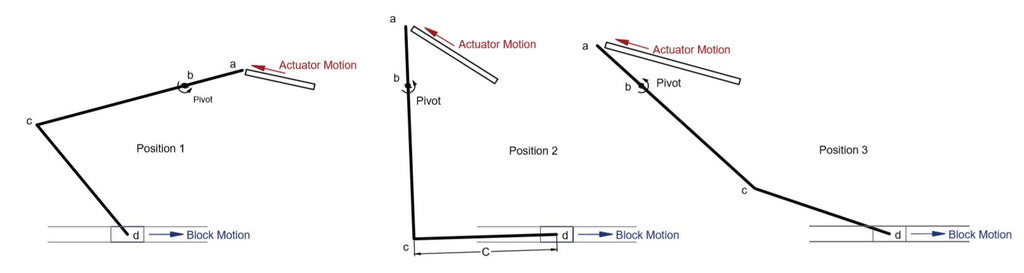
الشكل 4: باب حظيرة الدجاج في ثلاثة أوضاع مختلفة
منصة المقص (Scissor Lift)
تُعد منصة المقص تطبيقاً آخر يستخدم هذا المبدأ لتحقيق مزيد من الحركة الخطية عبر الرافعة الميكانيكية. ولتقديم مثال على كيفية الاستفادة من مشغل خطي، تم إنشاء نموذج ثلاثي الأبعاد مع مشغل لمنصة مقص لمحاكاة حركة أكبر لمنصة باستخدام حركة أقصر نسبياً للمشغل.
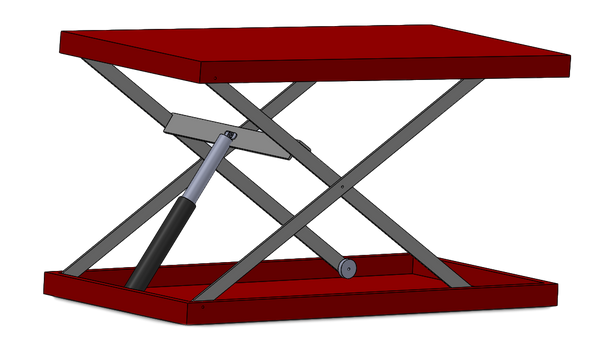
الشكل 5: نموذج ثلاثي الأبعاد لمنصة مقص أحادية المرحلة
كما ترى في الشكل 5، استُخدم مشغل لمنصة مقص بشوط قصير نسبياً (8 inches في هذه الحالة) لرفع منصة إلى ارتفاع 36 inches. تعمل منصات المقص بالمبدأ نفسه، حيث يدور جسم حول نقطة ارتكاز ويُنشأ تفوق ميكانيكي. ولكن بدلاً من إضافة عضو آخر هدفه مجرد ترجمة الحركة الدورانية لطرف واحد، تُقيد حركة أطراف الأعضاء باتجاه أفقي فقط. وينتج عن ذلك أن يكون اتجاه القوة إلى أعلى فقط.
اللافت في منصة المقص أنه إذا تم تثبيت المشغل في النصف العلوي، فإن الرفع سيصعد مع تمدد المشغل. أما إذا ثُبّت المشغل في النصف السفلي، فسيصعد الرفع مع انكماش المشغل. لاحظ أيضاً أنه كلما كان تثبيت المشغل أقرب إلى المفصل الأوسط للأعضاء، كلما ارتفع الرفع أكثر، لكن سيحتاج المشغل إلى قوة أكبر.
إذا كنت تبحث عن كيفية الاستفادة من مشغل خطي لتحريك جسم مسافة أطول، فمشغل تلسكوبي أو آلية منصة مقص DIY سيؤديان الغرض. ولأجل مشغل لمنصة مقص أو آلية باب، تمتلك Progressive Automations تشكيلة متنوعة من الطرازات بأطوال شوط وقوى مختلفة لتناسب جميع احتياجاتك في مشاريع الـ DIY.