
- Úvod do fungování aktuátorů
- Mechanismy poziční zpětné vazby
- Typy řídicích systémů pro aktuátory
- Zpětná vazba a oprava chyb
- Ovládací boxy pro lineární aktuátory
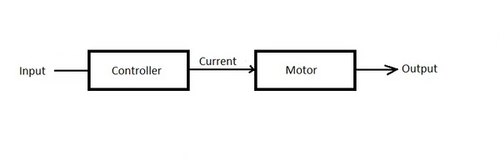
Úvod do fungování aktuátorů
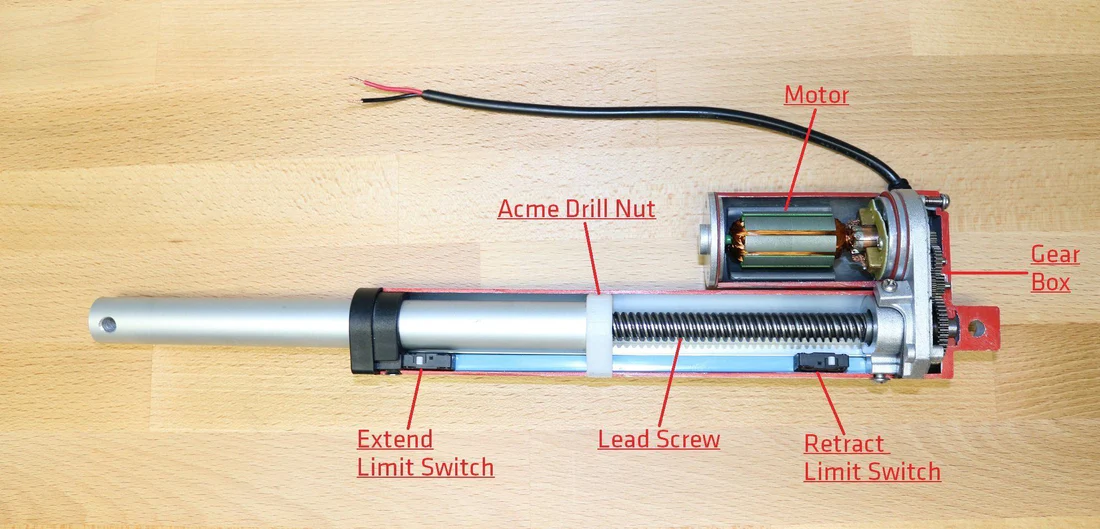
V elektrické lineární aktuátory, elektrický proud se používá k vyvolání rotačního pohybu v elektrický motor který je mechanicky spojen s převodovkou a využívá lead
screw pro cyklování hřídele aktuátoru připojené k VRCHOL vrtací matice pro lineární pohyb. Řídicí systémy pro aktuátory se v průběhu let výrazně vyvinuly, což zvýšilo všestrannost a funkčnost těchto zařízení. Lineární aktuátory lze ovládat různými prostředky a řídicími mechanismy, včetně:
• Bezdrátové ovladače – nabízejí uživatelům pohodlí dálkového ovládání na dálku bez nutnosti fyzických kabelů.
• Ovladače s podporou Wi-Fi a Bluetooth - umožňují integraci do inteligentních systémů a přístup prostřednictvím mobilních zařízení, poskytují uživatelsky přívětivá rozhraní a možnost vzdáleně a přesně upravovat nastavení.
Tento pokrok v technologii pohonů a řídicích systémů rozšířil rozsah jejich použití, díky čemuž se staly nepostradatelnými v moderních automatizovaných systémech. Ať už jde o seřizování oken v vozidla, provoz v těžkém provozu zemědělské vybavenínebo automatizace domácích spotřebičůAktuátory i nadále hrají klíčovou roli v převodu elektrických signálů do fyzikálních akcí.

Pochopení řídicích systémů pro aktuátory
Hlavním účelem těchto systémů je zajistit, aby aktuátory fungovaly přesně, efektivně a spolehlivě podle předem definovaných parametrů. Význam řídicích systémů v provozu aktuátorů nelze přeceňovat, zejména pokud jde o dosažení přesného a efektivního řízení pohybu. Tyto systémy jsou klíčové z několika důvodů:
1. Přesnost: Řídicí systémy umožňují jemné doladění pohybů aktuátorů pro dosažení vysoké úrovně opakovatelnosti a přesnosti. To je nezbytné v aplikacích, kde je přesné polohování kritické, například v robotické chirurgii nebo leteckém inženýrství.
2. Účinnost: Optimalizací způsobu, jakým aktuátory reagují na povely, řídicí systémy snižují spotřebu energie a minimalizují opotřebení. To nejen prodlužuje životnost aktuátoru, ale také zvyšuje celkovou účinnost systému, ve kterém pracuje.
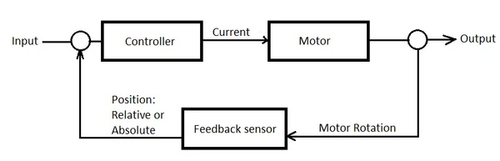
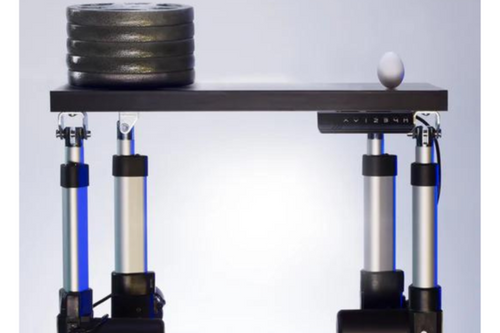
3. Adaptabilita: Mechanismy zpětné vazby mohou upravovat chování kompatibilních aktuátorů v reálném čase analýzou zpětné vazby polohy od kompatibilních aktuátorů. Tato adaptabilita je zásadní v dynamických prostředích, kde podmínky se rychle mění, například v automatizovaných výrobních procesech nebo když více aktuátorů trpí nerovnoměrným rozložením hmotnosti.
5. Bezpečnostní prvky: Naprogramované bezpečnostní prvky, jako je ochrana proti přetížení, pomáhají předcházet poškození pohonu nebo aplikace tím, že zastaví provoz poté, co řídicí jednotka detekuje nadměrně vysoký odběr elektrického proudu. Další bezpečnostní funkcí, kterou lze nalézt v řídicích boxech, je ochrana proti přehřátí, která zastaví provoz po určité době cyklu, aby se zajistilo, že provoz zůstane v rámci jmenovitého pracovního cyklu aktuátoru, a tím se zabránilo spálení motoru. Řídicí systémy jsou základem funkčnosti aktuátorů a poskytují potřebnou inteligenci a adaptabilitu k zajištění přesnosti, efektivity, bezpečnosti a efektivního řízení pohybu. Jejich role je klíčová v rozšiřující se oblasti automatizační technologie, kde je přesnost pohybu často základem provozního úspěchu.
Komponenty a typy řídicích systémů
Klíčové komponenty základní řídicí jednotky
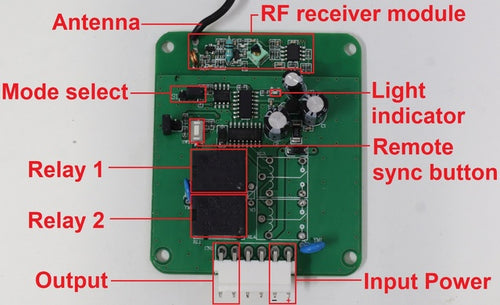
V základní řídicí jednotce určené pro elektrické lineární aktuátory hraje každá komponenta klíčovou roli v zajištění efektivního provozu. Zde je rozpis těchto hlavních komponent, jejich funkcí a účelů, kterým slouží:1. Relé: Relé fungují jako spínače, které ovládají elektrický obvod s vysokým výkonem pomocí signálu s nízkým výkonem. U řídicích jednotek určených pro správu 2vodičových aktuátorů jsou dvě relé nezbytná pro obrácení polarity napětí přivedeného na dva vodiče aktuátoru, což následně mění směr pohybu. To umožňuje obousměrné ovládání v jednoduchém nastavení pro vysouvání a zasouvání aktuátoru.
2. Vstupní kanály: Vstupní kanály jsou rozhraní, přes která Řídicí systém přijímá elektrické signály z externích zdrojů, jako jsou napájecí zdroje nebo signály z kabelových dálkových ovladačů. Ovládací boxy, které pracují s polohovou zpětnou vazbou, mohou také přijímat vstupy ze senzorů aktuátoru. Tyto kanály zpracovávají vstupy od uživatele a/nebo senzorů, aby určily, jak by měl aktuátor fungovat, což je činí zásadními pro iniciování a řízení pohybů aktuátoru na základě specifických požadavků.
3. Výstupní kanály: Výstupní kanály přenášejí řídicí signály z řídicí jednotky do aktuátoru nebo jiných komponent, jako jsou relé. Ovládací boxy, které pracují s polohovou zpětnou vazbou, mohou také vydávat elektrický proud, aby senzory aktuátoru měly dostatek energie k provozu. Tyto kanály jsou klíčové pro provádění příkazů určených řídicím systémem a přímo ovlivňují chování aktuátoru.
4. Tlačítko vzdálené synchronizace: Toto tlačítko se používá k synchronizaci řídicího systému s dálkovým ovladačem. Zajišťuje, aby řídicí systém rozpoznával a zpracovával dálkové vstupy, což usnadňuje pohodlné a flexibilní ovládání na dálku.
5. Světelný indikátor: Světelné indikátory poskytují vizuální zpětnou vazbu o stavu systému. Mohou být indikátorem pro zapnutí/vypnutí napájení, provozní režimy, chybové stavy nebo příjem signálu, což pomáhá při monitorování a řešení problémů systému bez nutnosti použití složitých diagnostických nástrojů.
6. Výběr režimu: Tato funkce umožňuje uživateli přepínat mezi různými provozními režimy řídicí jednotky, jako je například okamžité nebo neaktivní ovládání. V okamžitém režimu musí být tlačítko dálkového ovladače trvale drženo v aktivní poloze, aby zařízení fungovalo. Jakmile spínač uvolníte, zařízení přestane fungovat. Neaktivní režim funguje jako spínač, který zůstává ve své poslední nastavené poloze, dokud se znovu nezmění, bez ohledu na to, zda je stisknut. To znamená, že po aktivaci zařízení pokračuje v provozu, dokud se spínač ručně nevypne.
7. Anténa: Anténa je součástí řídicích jednotek, které mají bezdrátovou komunikační konfiguraci. Antény se používají ke zlepšení dosahu a kvality signálu mezi řídicím systémem a zařízeními dálkového ovládání nebo mezi propojenými systémy. Je klíčová pro udržení robustní komunikace v prostředích, kde je přímé zapojení nepraktické nebo nežádoucí.
8. RF Přijímací modul: Tento modul přijímá rádiofrekvenční signály vysílané bezdrátovými dálkovými ovladači. Dekóduje tyto signály do akčních příkazů, kterým řídicí systém rozumí a na které může reagovat. Rádiový přijímací modul je nezbytný pro bezdrátové ovládání, protože umožňuje dálkové ovládání pohonu bez fyzického kontaktu. Tyto komponenty dohromady tvoří komplexní řídicí systém pro 2vodičové pohony, z nichž každý plní specifickou funkci, která přispívá k celkové účinnosti a účinnosti provozu pohonu. Tento systém nejen umožňuje přesné ovládání pohybů pohonu, ale také vylepšuje uživatelské rozhraní a interakci, díky čemuž je přizpůsobitelný široké škále aplikací.
Mechanismy poziční zpětné vazby
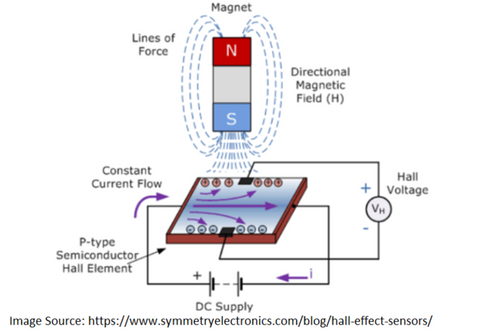
Hallovy senzory
Teorie Hallova jevu, kterou Edwin Hall (který objevil Hallův jev) uvádí, že kdykoli je magnetické pole aplikováno ve směru kolmém k toku elektrického proudu ve vodiči, indukuje se rozdíl napětí. Toto napětí lze použít k detekci, zda se Hallův senzor nachází v blízkosti magnetu.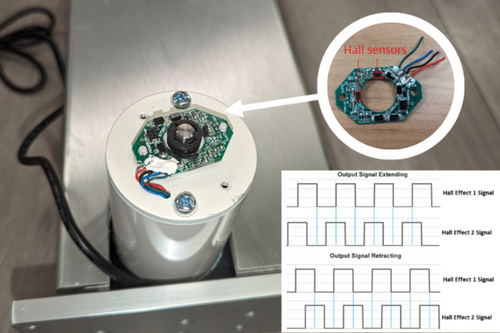
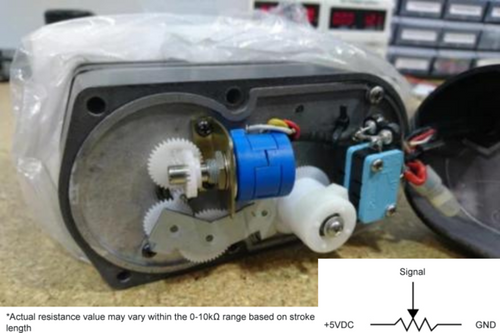
Potenciometry
Potenciometr poskytuje proměnný odpor, který je úměrný poloze aktuátoru. Mezi knoflíkem potenciometru a rotujícím motorem aktuátoru jsou často spojena ozubená kola. Jak se aktuátor pohybuje, mění se hodnota odporu, kterou lze měřit a převádět na údaje o poloze. Tyto informace pak řídicí systém používá k jemnému nastavení polohy aktuátoru, což zvyšuje přesnost.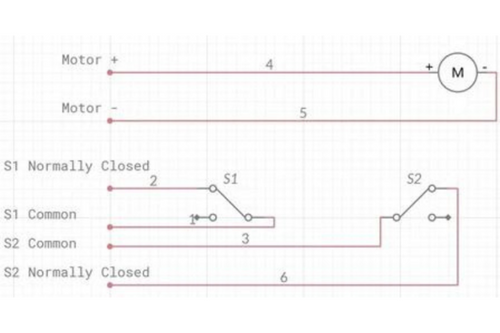
Zpětná vazba koncového spínače
Účelem signálů zpětné vazby koncových spínačů je umožnit systému určit, zda aktuátor fyzicky aktivoval interní koncové spínače. Tento druh zpětné vazby je jednoduchý a užitečný pro aplikace, které vyžadují především informace o tom, zda aktuátor dosáhl plně vysunuté nebo plně zasunuté polohy.Typy řídicích systémů pro aktuátory
Jeden příklad jednoduchého systému s otevřenou smyčkou zahrnuje kolébkový spínač s okamžitým stisknutím, který je připojen k lineárnímu aktuátoru. To vyžaduje, aby obsluha fyzicky stiskla a podržela spínač, aby aktuátor pokračoval v cyklu, a uvolnění spínače před dosažením koncové polohy aktuátoru způsobí, že se aktuátor v polovině pohybu zastaví.
Volba řídicího systému a jeho komponent významně ovlivňuje funkčnost a optimalizaci výkonu pohonů. Integrací účinných mechanismů zpětné vazby a výběrem vhodného typu řídicího systému lze pohony optimalizovat pro širokou škálu aplikací, což zajišťuje jak přesnost, tak spolehlivost jejich provozu.
Zpětná vazba a oprava chyb
Proměnné, které řídicí systémy korigují
1. Poloha: Řídicí systémy pomáhají zajistit, aby aktuátor přesně dosáhl a udržel požadovanou polohu, a to porovnáním polohy uživatele se skutečnou polohou naměřenou ze senzorů zpětné vazby polohy. Příkladem může být situace, kdy uživatelé u stolu, kteří pracují ve stoje, stisknou tlačítko na ovladači, aby se aktuátory přesunuly do určité přednastavené polohy v paměti a upravily tak svůj pracovní prostor ze sedící do stojící výšky.
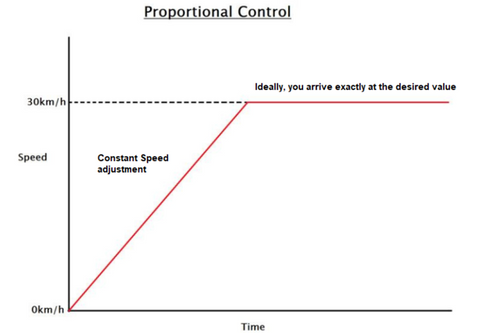
2. Rychlost: Odečtením zpětné vazby polohy a vydělením ujeté vzdálenosti uplynulým časem získáte rychlost pohybu. Některé řídicí systémy umožňují nastavitelnou rychlost pomocí PWM (modulace šířky impulsů), což umožňuje pohonu pohybovat se různými rychlostmi na základě požadavků aplikace. To je užitečné v aplikacích, kde jsou nutné různé rychlosti, například u pohonů pohánějících pohyb leteckých simulátorů.
3. Síla: Některé řídicí systémy mohou regulovat množství síly vyvíjené pohony, čímž zajišťují, že fungují v bezpečných mezích a zabraňují poškození systému nebo okolních součástí. Měřením odběru elektrického proudu mohou řídicí systémy odhadnout přibližně, kolik síly lineární pohony vyvíjejí. Tato funkce je užitečná pro lineární pohony, které otevírají a zavírají okna, aby vypnuly napájení a zastavily působení síly v případě, že ruka nebo překážka osoby blokuje dráhu pohybu.
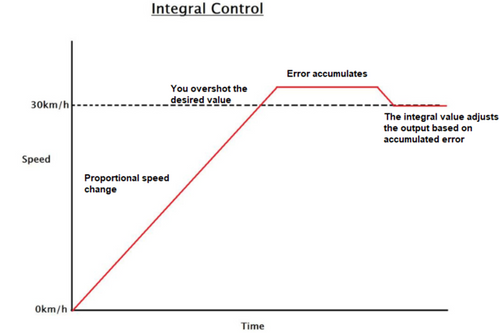
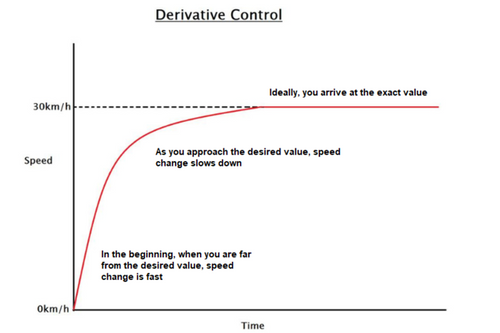
Typy kontrolních strategií
Výběr správného řídicího systému
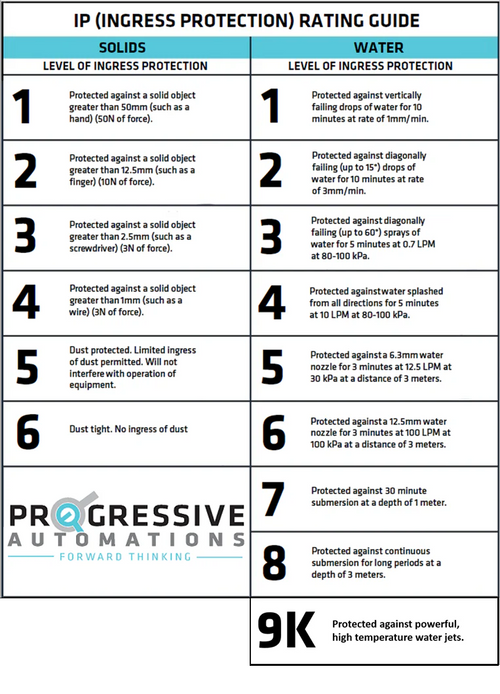
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Ovládací boxy s Hallovým jevem
Další informace naleznete v našem blogu o použití ovládacích boxů FLTCON.
