
Az egyenáramú motorokat széles körben használják mind ipari alkalmazásokban, mind otthoni személyes projektekhez. Az egyik legfontosabb szempont egyenáramú motor használatakor, hogy csatlakoztatnak-e valamilyen visszacsatolást a motorhoz.
Mi a visszajelzés?
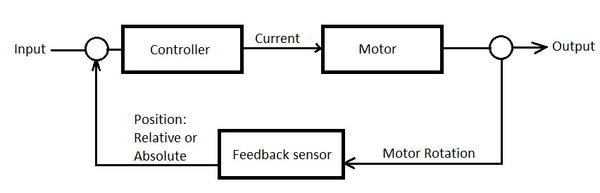
A visszacsatolás minden olyan információra vonatkozik, amelyet a vezérlő felhasználhat egy folyamat monitorozására. Egyenáramú motorokban a visszacsatolást általában pozíció, fordulatok száma és forgásirány formájában gyűjtik. Ez az információ ezután továbbítható a vezérlőnek, amely megméri a motortengely szögsebességét és helyzetét, ezt általában „zárt hurkú vezérlésnek” nevezik.
Kifinomultabb felhasználási esetekben a motor és más források visszacsatolása szabályozható nemcsak a pontos sebesség és pozíció, hanem a kívánt dinamikus válasz, szinkronizáció és stabilitás elérése érdekében is.
A visszajelzés használatának előnyei
Megfelelő megvalósítás esetén a visszacsatolás lehetővé teheti a gépek hatékonyabb és nagyobb ismétlési pontosságú működését. A visszacsatolás lehetővé teheti a mechanizmus számára, hogy automatikusan állítsa be a kimenetet a stabilitás fenntartása, az eltérések csökkentése és a hibák minimalizálása érdekében emberi beavatkozás nélkül.
Egy jó visszacsatolásos szabályozórendszerre egy egyszerű példa a termosztát. A szabályozó méri a helyiség hőmérsékletét, és a fűtőelemek teljesítményét állítja be a beállított hőmérséklet fenntartása érdekében.
Az egyenáramú motorok visszacsatolásának egyik legfontosabb előnye a PID-szabályozás. A PID egy olyan szabályozási hurok mechanizmus, amelyet az iparban széles körben használnak a gép sebességében vagy pozíciójában lévő hibák automatikus kompenzálására.
A visszajelzés felhasználható hibatűrő mechanizmusok megvalósítására és az alkalmazás hibaelhárítására is. Például, ha a lineáris aktuátorok szinkronban kellene mozogniuk, de az egyik késik, akkor valami nincs rendben. A rendszer ezután leállíthatja mindkét aktuátor mozgását, hogy megakadályozza a sérülést vagy a dőlést.
Visszacsatoló érzékelők típusai egyenáramú motorokhoz
Az egyenáramú motorok visszacsatolásának leggyakoribb típusai a potenciométerek, a Hall-effektus-érzékelők és az enkóderek. Ami a pontosságot és a precizitást illeti, mindhárom típus összehasonlítható, és nagyon hatékonyak a modern technológiával. A különbségek akkor mutatkoznak meg, amikor figyelembe vesszük a konkrét teljesítménykövetelményeket, mint például a tartósságot, a környezeti tényezőket, az elektromágneses interferenciát és a hőmérsékleti teljesítményt.
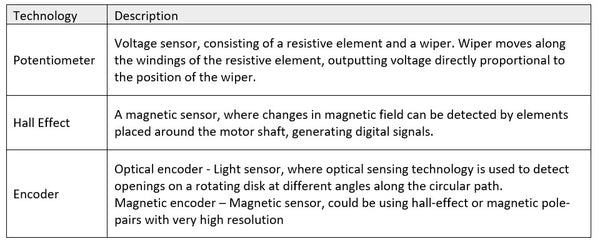
Potenciométer
Az ilyen típusú visszacsatolás legnagyobb előnye az egyszerűsége. A potenciométer hatékonyan alakít át egy hagyományos egyenáramú motort szervomotorrá, lehetővé téve a precíz mozgás- és/vagy sebességszabályozást. A potenciométerek közvetlen szöghelyzet-információt szolgáltatnak a motor tengelyéről. Ennek eredményeként, amikor a rendszer áramkimaradásban van, a potenciométer megtarthatja pozícióinformációját anélkül, hogy „alaphelyzetbe” kellene állnia. Továbbá, mivel a potenciométerek magjában csak feszültségosztók egy nagy ellenállással, jól kezelik az elektromágneses interferenciát (EMI).
A potenciométerek használatának vannak hátrányai is. A potenciométeres érzékelőknek érintkezniük kell a mérések elvégzéséhez, ami azt jelenti, hogy kevésbé tartósak és korlátozott az élettartamuk a visszacsatolás más formáihoz képest. A potenciométerek viszonylag lassú mérési módot jelentenek, mind az érintkezés szükségessége, mind pedig az analóg-digitális átalakító használata miatt, mielőtt a tényleges visszacsatolásos vezérlés létrejönne. Végül a motorokban lévő potenciométerek korlátozzák a tengely által megtehető fordulatok számát. A potenciométeres visszacsatolással rendelkező alkalmazásoknál biztosítani kell a túlzott elmozdulás megakadályozását.
Hall-effektus
A Hall-effektus-érzékelők a motor-visszacsatolás alapvető elemei, mivel megbízhatóak, precízek és hosszú élettartamúak. A potenciométerrel ellentétben a Hall-effektus-érzékelőknek nem kell semmilyen érintkezést létesíteniük, így hasznosak zord környezetben, rendkívül ellenállóak a kopással és elhasználódással szemben, és megbízhatóak a nagy ütésterhelésű környezetben. A Hall-effektus-érzékelők elektromos impulzusokat bocsátanak ki, amikor a mágnes az érzékelő elektronikával van egy vonalban. Emiatt alkalmasak nagy sebességű alkalmazásokhoz, és lehetővé teszik bizonyos motortengely-szögek előre programozását.
A Hall-effektusú érzékelők egyik hátránya, hogy csak relatív pozícióinformációkat tudnak szolgáltatni. Ez azt jelenti, hogy minden alkalommal, amikor a rendszer áramkimaradásban van, a Hall-effektusú érzékelőket egy ismert helyre kell helyezni és alaphelyzetbe kell állítani. Továbbá, a Hall-effektusú érzékelők információhordozó vezetékei érzékenyek lehetnek az elektromágneses interferenciára és zajra. Emiatt a jelek néha elveszhetnek, vagy hamis jelek keletkezhetnek, ami azt jelenti, hogy a pozícióinformációk idővel „elsodródhatnak”.
Kódoló
Léteznek optikai és mágneses kódolók. A mágneses kódolók valószínűleg a legjobb érzékelők összességében a generáláshoz visszacsatoló jelekÉrintésmentesek, akárcsak a Hall-effektusú érzékelők, ami azt jelenti, hogy nagyon hosszú az élettartamuk. Nagyon gyorsak és jellemzően nagyon nagy felbontásúak. A mágneses útmérőket a por vagy más részecskék sem befolyásolják, és számos környezetben használhatók.
Az enkóderek jellemzően drágák és külön elektronikát igényelnek, amit nehéz lehet beállítani és vezérelni. A tervezés szükségtelen bonyolultsága nem mindig jó ötlet, mert növelné a potenciális meghibásodási módok számát is.
A tervezők számára számos visszajelzési forma áll rendelkezésre, és a modern technológia fejlődésével ezek pontossága nagyjából azonos lehet. A visszajelzés típusának kiválasztásakor figyelembe kell venni az alkalmazás teljesítményigényét, és meg kell érteni az alkalmazott technológiák előnyeit.