Der er to metoder til styring af flere aktuatorer – parallel og synkron. Parallel styring sender en konstant spænding til hver aktuator, mens synkron styring sender variabel spænding til hver aktuator.
Processen med at synkronisere flere aktuatorer er nødvendigt, når man implementerer to eller flere aktuatorer til at bevæge sig med samme hastighed. Dette kan opnås med to former for positionsfeedback – Hall-effektsensorer og flerdrejepotentiometre.
En lille variation i aktuatorproduktionen resulterer i en lille variation i aktuatorhastigheden. Dette kan korrigeres ved at sende en variabel spænding til aktuatoren, der matcher to aktuatorhastigheder. Positionsfeedback er nødvendig for at bestemme, hvor meget spænding der skal sendes til hver aktuator.
Synkronisering af aktuatorer er vigtigt, når man styrer to eller flere aktuatorer, hvor præcis styring er nødvendig. For eksempel applikationer, der kræver flere aktuatorer for at bevæge en last, samtidig med at der opretholdes ligelig lastfordeling på tværs af hver aktuator. Hvis parallel styring blev brugt i denne type applikation, kan der opstå ulige lastfordeling på grund af variable slaghastigheder og i sidste ende forårsage for stor kraft på en af aktuatorerne.
Hall-effektsensor
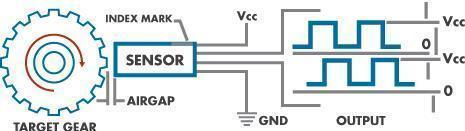
For at opsummere Hall-effektteorien sagde Edwin Hall (som opdagede Hall-effekten), at når et magnetfelt påføres i en retning vinkelret på strømmen af elektrisk strøm i en leder, induceres en spændingsforskel. Denne spænding kan bruges til at detektere, om sensoren er i nærheden af en magnet eller ej. Ved at fastgøre en magnet til motorens aksel kan sensorerne detektere, når akslen er parallel med dem.
Ved hjælp af et lille printkort kan denne information udsendes som en firkantbølge, der kan tælles som en række pulser. Ved at tælle disse pulser kan du holde styr på, hvor mange gange motoren har drejet rundt, og hvordan motoren bevæger sig.

Nogle Hall-effekt-printkort har flere sensorer på sig. Det er almindeligt, at de har 2 sensorer ved 90 grader, hvilket resulterer i et kvadratisk output. Ved at tælle disse pulser og se, hvilken der kommer først, kan du se, hvilken retning motoren drejer. Eller du kan bare overvåge begge sensorer og få flere tællinger for mere præcis kontrol.
Synkronisering via Hall-effektsensorfeedback kan opnås med progressive automatiseringer PA-40 Synkroniseret dobbelt Hall-effektaktuatorstyring boks.
Potentiometersynkronisering
Multippeldrejepotentiometre, også kendt som reostater eller variable modstande, giver en analog repræsentation af en aktuatorposition. Sensoren er fastgjort til et gearsystem, der er fastgjort til motoren, og som drejer potentiometeret og derfor justerer modstandsværdien proportionalt med den bevægelse, aktuatoren har foretaget. Den samlede modstands-/spændingsændring kan måles for at opnå et fuldt skalaområde af den analoge værdi, som repræsenterer aktuatorens samlede slaglængde. Potentiometrene, der bruges i Progressive Automations-aktuatorer, er 10 KΩ.
Til synkroniseringsformål aflæses den analoge værdi for hvert potentiometer, som en program-/styreboks derefter kan bruge til at bestemme den nødvendige spændingsudgang til hver aktuator. Potentiometersynkronisering kan opnås via mikrocontroller programmering.
Vigtigheden af synkronisering
På dette tidspunkt forklares synkroniseringsmetoderne. Nu vil vi se på, hvorfor synkronisering er vigtig. Når målet om at bruge flere aktuatorer til at skubbe eller trække en last er påkrævet, skal vi sikre, at aktuatorerne matcher hastighederne præcist. Denne præcision i aktuatorhastighed er nødvendig for at sikre ligelig lastfordeling.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two PA-04 IP-66 lineær aktuator with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Endelige kontrolelementer
Vigtigheden af at synkronisere aktuatorer koger ned til at sikre ensartet bevægelse af flere aktuatorer og forhindre aktuatorfejl.
Hall-effekt-kontrolboks
Når aktuatorer tilpasses med HALL-effektsensorer, PA-40 kontrolboks kan bruges til Hall-effektsynkronisering.
Arduino mikrocontroller
Implementering af aktuatorstyring kan opnås via Arduino-programmering. Besøg venligst følgende links for mere information:
Hvis du har yderligere spørgsmål, er du velkommen til at kontakte ingeniørafdelingen støtte og få et øjeblikkeligt svar.