
- Einführung in die Funktionsweise von Aktuatoren
- Positionsrückkopplungsmechanismen
- Arten von Steuerungssystemen für Aktuatoren
- Feedback und Fehlerkorrektur
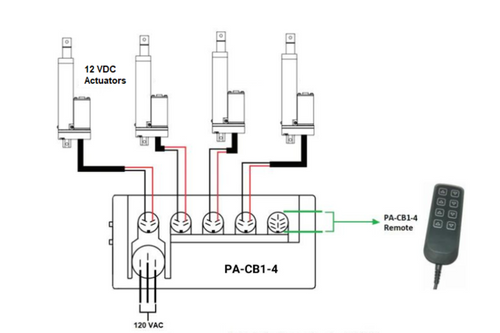
- Steuerboxen für Linearantriebe
Einführung in die Funktionsweise von Aktuatoren
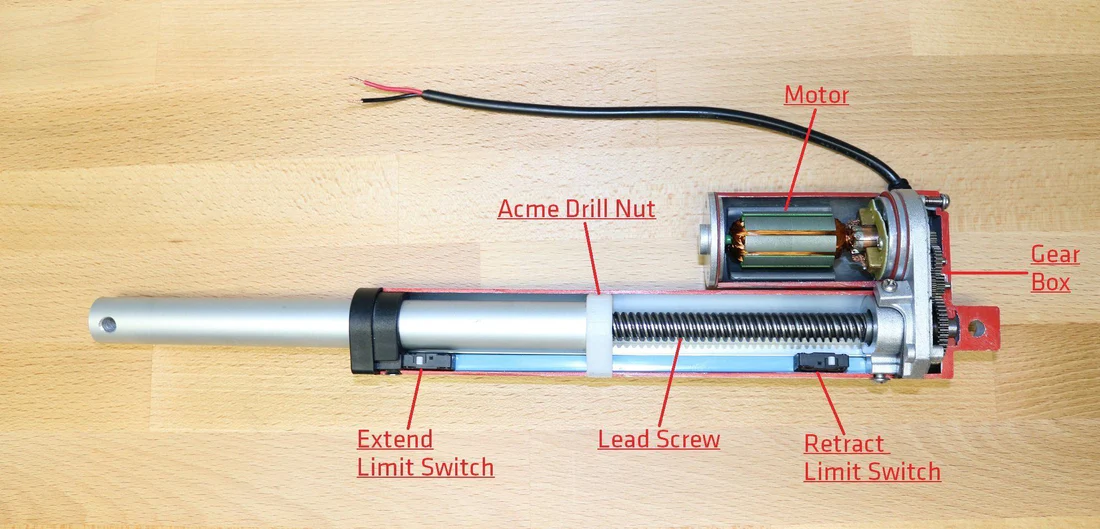
In electric Linearantrieben wird elektrischer Strom verwendet, um eine Drehbewegung in einem electric Motor zu erzeugen
das mechanisch mit einem Getriebe verbunden ist und ein lead verwendet
Schraube zum Zyklisieren der Welle des Aktuators, die an einer ACME Bohrmutter für lineare Bewegung befestigt ist. Steuerungssysteme für Aktoren haben sich im Laufe der Jahre erheblich weiterentwickelt und die Vielseitigkeit und Funktionalität dieser Geräte verbessert. Linearantriebe können über verschiedene Mittel und Steuermechanismen betrieben werden, darunter:
• Drahtlose Controller – bieten Benutzern den Komfort einer Fernbedienungsbedienung aus der Ferne, ohne dass physische Kabel erforderlich sind.
• Wi-Fi und Bluetooth-fähige Controller – ermöglichen die Integration in intelligente Systeme und den Zugriff über mobile Geräte, bieten benutzerfreundliche Schnittstellen und die Möglichkeit, Einstellungen aus der Ferne und präzise anzupassen.
Diese Fortschritte in der Aktuatortechnologie und bei Steuerungssystemen haben den Anwendungsbereich erweitert und sie in modernen automatisierten Systemen unverzichtbar gemacht. Ob es sich um die Anpassung von Fenstern in vehicles, im Hochleistungsbetrieb agriculture-Geräten oder automating Haushaltsgeräte, Aktuatoren spielen weiterhin eine entscheidende Rolle bei der Umsetzung elektrischer Signale in physikalische Aktionen.

Steuerungssysteme für Aktuatoren verstehen
Der Hauptzweck dieser Systeme besteht darin, sicherzustellen, dass Aktuatoren gemäß vordefinierten Parametern genau, effizient und zuverlässig funktionieren. Die Bedeutung von Steuerungssystemen im Aktuatorbetrieb kann nicht genug betont werden, insbesondere wenn es um die Erzielung einer präzisen und effizienten Bewegungssteuerung geht. Diese Systeme sind aus mehreren Gründen von entscheidender Bedeutung:
1. Präzision: Steuerungssysteme ermöglichen die Feinabstimmung der Aktuatorbewegungen, um hohe Werte von repeatability und Genauigkeit zu erreichen. Dies ist bei Anwendungen unerlässlich, bei denen eine genaue Positionierung von entscheidender Bedeutung ist, beispielsweise in der Roboterchirurgie oder der Luft- und Raumfahrttechnik.
2. Effizienz: Durch die Optimierung der Art und Weise, wie Aktuatoren auf Befehle reagieren, reduzieren Steuerungssysteme den Energieverbrauch und minimieren den Verschleiß. Dies verlängert nicht nur die Lebensdauer des Aktuators, sondern steigert auch die Gesamteffizienz des Systems, in dem er arbeitet.
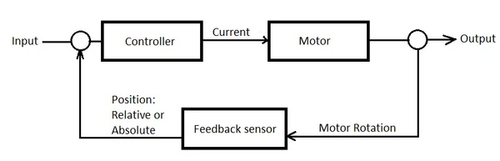
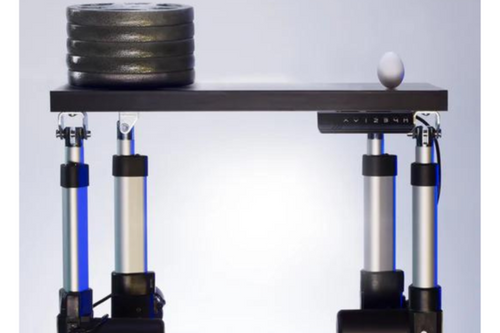
3. Anpassungsfähigkeit: Rückkopplungsmechanismen können das Verhalten kompatibler Aktuatoren in Echtzeit anpassen, indem sie die Positionsrückkopplung kompatibler Aktuatoren analysieren. Diese Anpassungsfähigkeit ist in dynamischen Umgebungen von entscheidender Bedeutung, in denen sich die Bedingungen schnell ändern, beispielsweise bei automatisierten Herstellungsprozessen oder wenn mehrere Aktuatoren eine ungleiche Gewichtsverteilung aufweisen.
5. Sicherheitsfunktionen: Programmierte Sicherheitsfunktionen wie der Überlastschutz helfen dabei, Schäden an einem Aktuator oder der Anwendung zu verhindern, indem sie den Betrieb stoppen, nachdem der Steuerkasten eine übermäßig hohe elektrische Stromaufnahme erkannt hat. Ein weiteres Sicherheitsmerkmal in den Boxen control umfasst einen Überhitzungsschutz, um den Betrieb nach einer bestimmten Zykluszeit zu stoppen und so sicherzustellen, dass der Betrieb innerhalb der Arbeitszykluswerte eines Aktuators bleibt und so Motorausbrüche vermieden werden. Steuerungssysteme sind für die Funktionalität von Aktuatoren von grundlegender Bedeutung und bieten die notwendige Intelligenz und Anpassungsfähigkeit, um Präzision, Effizienz, Sicherheit und effektive Bewegungssteuerung zu gewährleisten. Ihre Rolle ist von entscheidender Bedeutung im expandierenden Bereich der Automatisierungstechnologie, wo Bewegungspräzision oft der Eckpfeiler des betrieblichen Erfolgs ist.
Komponenten und Arten von Steuerungssystemen
Schlüsselkomponenten einer Basissteuerbox
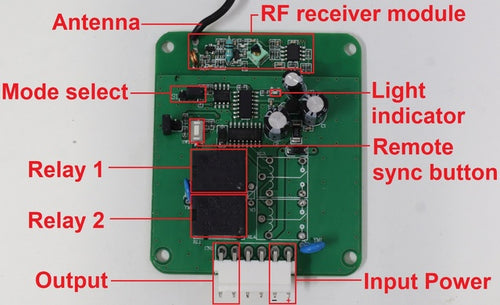
In einem grundlegenden Steuerkasten für elektrische Linearantriebe spielt jede Komponente eine entscheidende Rolle für einen effizienten Betrieb. Hier ist eine Aufschlüsselung dieser Hauptkomponenten, ihrer Funktionen und der Zwecke, denen sie dienen:1. Relais: Relays fungieren als Schalter, die den Stromkreis mit hoher Leistung mithilfe eines Signals mit niedriger Leistung steuern. Bei Steuerkästen zur Verwaltung von 2-Draht-Aktuatoren sind zwei Relais unerlässlich, um die Polarität der an den beiden Drähten des Aktuators angelegten Spannung umzukehren, was wiederum die Bewegungsrichtung ändert. Dies ermöglicht eine bidirektionale Steuerung in einem einfachen Aufbau zum Ausfahren und Einfahren des Aktuators.
2. Eingangskanäle: Eingangskanäle sind Schnittstellen, über die das Steuersystem elektrische Signale von externen Quellen wie Stromversorgungen oder Signale von kabelgebundenen Fernbedienungen empfängt. Steuerboxen, die mit Positionsrückmeldung arbeiten, können auch Eingaben von den Sensoren eines Aktuators empfangen. Diese Kanäle verarbeiten die Eingaben des Benutzers und/oder der Sensoren, um zu bestimmen, wie der Aktuator funktionieren soll, und sind daher von grundlegender Bedeutung für die Initiierung und Steuerung von Aktuatorbewegungen basierend auf spezifischen Anforderungen.
3. Ausgangskanäle: Ausgangskanäle liefern Steuersignale vom Controller an den Aktuator oder andere Komponenten wie Relais. Steuerkästen, die mit Positionsrückkopplung arbeiten, können auch elektrischen Strom ausgeben, sodass die Sensoren eines Aktuators über die nötige Leistung verfügen, um zu arbeiten. Diese Kanäle sind entscheidend für die Ausführung der vom Steuerungssystem festgelegten Befehle und beeinflussen direkt das Verhalten des Aktuators.
4. Fernsynchronisierungstaste: Mit dieser Taste wird das Steuerungssystem mit einem Fernbedienungsgerät synchronisiert. Es stellt sicher, dass die Ferneingaben vom Steuerungssystem erkannt und verarbeitet werden, was einen bequemen und flexiblen Betrieb aus der Ferne ermöglicht.
5. Lichtanzeige: Lichtanzeigen geben visuelles Feedback zum Systemstatus. Sie können ein Indikator für Ein-/Ausschalten, Betriebsmodi, Fehlerzustände oder Signalempfang sein, was bei der Überwachung und Fehlerbehebung des Systems hilft, ohne dass komplexe Diagnosetools erforderlich sind.
6. Modusauswahl: Mit dieser Funktion kann der Benutzer zwischen verschiedenen Betriebsmodi der Steuerbox wechseln, beispielsweise zwischen momentanen und nicht-momentanen Steuerungen. Im Momentmodus muss die Taste einer Fernbedienung kontinuierlich in der aktiven Position gehalten werden, damit das Gerät funktioniert. Sobald Sie den Schalter loslassen, funktioniert das Gerät nicht mehr. Der nicht-momentane Modus funktioniert wie ein Schalter, der in seiner zuletzt eingestellten Position bleibt, bis er erneut gewechselt wird, unabhängig davon, ob er gedrückt wird. Das bedeutet, dass das Gerät nach der Aktivierung weiter arbeitet, bis der Schalter manuell ausgeschaltet wird.
7. Antenne: Die Antenne ist Teil von Steuerboxen, die über einen drahtlosen Kommunikationsaufbau verfügen. Antennen werden verwendet, um die Signalreichweite und -qualität zwischen dem Steuersystem und Fernbedienungsgeräten oder zwischen miteinander verbundenen Systemen zu verbessern. Dies ist von entscheidender Bedeutung für die Aufrechterhaltung einer robusten Kommunikation in Umgebungen, in denen eine direkte Verkabelung unpraktisch oder unerwünscht ist.
8. HF-Empfängermodul: Dieses Modul empfängt Hochfrequenzsignale, die von drahtlosen Fernbedienungen gesendet werden. Es dekodiert diese Signale in umsetzbare Befehle, die das Steuersystem verstehen und darauf reagieren kann. Das HF-Empfängermodul ist für drahtlose Steuerungsaufbauten unerlässlich und ermöglicht den Fernbetrieb des Aktuators ohne physischen Kontakt. Zusammen bilden diese Komponenten ein umfassendes Steuerungssystem für 2-Draht-Aktuatoren, die jeweils eine bestimmte Funktion erfüllen, die zur Gesamteffektivität und Effizienz des Aktuatorbetriebs beiträgt. Dieses System ermöglicht nicht nur eine präzise Steuerung der Bewegungen des Aktuators, sondern verbessert auch die Benutzeroberfläche und Interaktion, sodass es an eine Vielzahl von Anwendungen angepasst werden kann.
Positionsrückkopplungsmechanismen
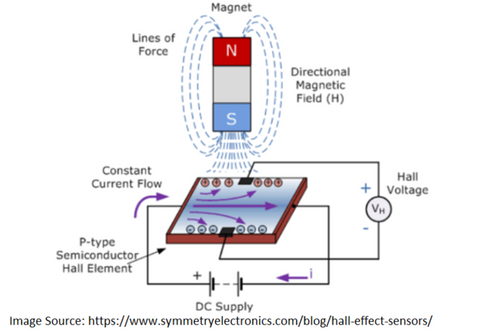
Halleffektsensoren
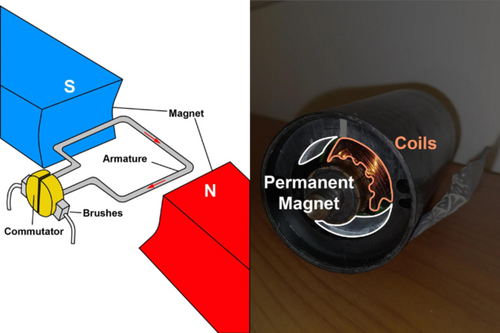
Die Hall-Effekt-Theorie von Edwin Hall (dem Entdecker des Hall-Effekts) besagt, dass immer dann, wenn ein Magnetfeld in einer Richtung senkrecht zum elektrischen Stromfluss in einem Leiter angelegt wird, eine Spannungsdifferenz induziert wird. Mit dieser Spannung kann erkannt werden, ob sich ein Hall-Effekt-Sensor in der Nähe eines Magneten befindet.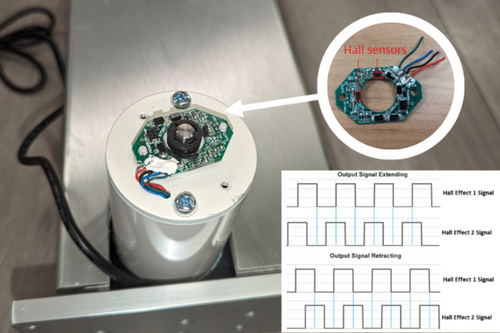
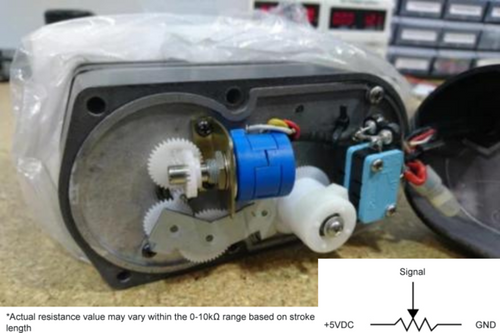
Potentiometer
Ein Potentiometer liefert einen variablen Widerstand, der proportional zur Position des Aktuators ist. Zwischen dem Knopf des Potentiometers und dem rotierenden Motor des Aktuators sind häufig Zahnräder angeschlossen. Während sich der Aktuator bewegt, ändert sich der Widerstandswert, der gemessen und in Positionsdaten umgewandelt werden kann. Diese Informationen werden dann von einem Steuersystem verwendet, um Feineinstellungen an der Position des Aktuators vorzunehmen und so die Genauigkeit zu verbessern.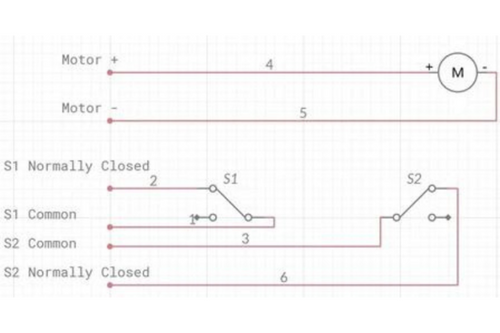
Grenzschalter-Feedback
Der Zweck von Endschalter-Rückkopplungssignalen besteht darin, einem System die Feststellung zu ermöglichen, ob der Aktuator die internen Endschalter physisch ausgelöst hat. Diese Art der Rückmeldung ist einfach und nützlich für Anwendungen, die hauptsächlich nur Informationen darüber erfordern, ob der Aktuator die vollständig ausgefahrene oder vollständig eingefahrene Position erreicht hat.Arten von Steuerungssystemen für Aktuatoren
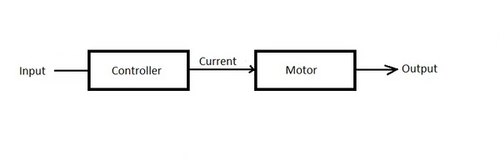
Ein Beispiel für ein einfaches Open-Loop-System umfasst einen momentanen Wippschalter, der mit einem Linearantrieb verbunden ist. Dies erfordert, dass ein Bediener den Schalter physisch drückt und hält, damit der Aktuator weiter radeln kann, und das Loslassen des Schalters, bevor der Aktuator das Ende der Bewegung erreicht hat, führt dazu, dass der Aktuator die Bewegung auf halbem Weg stoppt.
Die Wahl des Steuerungssystems und seiner Komponenten hat erhebliche Auswirkungen auf die Funktionalität und Leistungsoptimierung der Aktoren. Durch die Integration effektiver Rückkopplungsmechanismen und die Auswahl des geeigneten Steuerungssystemtyps können Aktuatoren für eine Vielzahl von Anwendungen optimiert werden, wodurch sowohl Präzision als auch Zuverlässigkeit in ihrem Betrieb gewährleistet werden.
Feedback und Fehlerkorrektur
Variablen, die Steuerungssysteme korrigieren für
1. Position: Steuerungssysteme tragen dazu bei, sicherzustellen, dass ein Aktuator die gewünschte Position genau erreicht und beibehält, indem sie die Position des Benutzers mit der tatsächlichen Positionsanzeige der Positionsrückkopplungssensoren vergleichen. Beispiele hierfür sind, wenn Stehpultbenutzer die Taste eines Controllers drücken, damit Aktuatoren zu einer bestimmten voreingestellten Speicherposition fahren, um ihren Arbeitsbereich von der Sitz- auf die Stehhöhe anzupassen.
2. Geschwindigkeit: Das Lesen der Positionsrückmeldung und das Teilen der zurückgelegten Strecke durch die verstrichene Zeit ergibt die Reisegeschwindigkeit. Einige Steuerungssysteme ermöglichen einstellbare Geschwindigkeitseinstellungen durch PWM (Pulsweitenmodulation), sodass sich der Aktuator je nach den Anforderungen der Anwendung mit unterschiedlichen Geschwindigkeiten bewegen kann. Dies ist nützlich bei Anwendungen, bei denen unterschiedliche Geschwindigkeiten erforderlich sind, beispielsweise für Aktuatoren, die die Bewegung von Flugsimulatoren antreiben.
3. Kraft: Bestimmte Steuerungssysteme können die von Aktuatoren ausgeübte Kraft regulieren und so sicherstellen, dass sie innerhalb sicherer Grenzen arbeitet und Schäden am System oder an umgebenden Komponenten verhindert. Durch die Messung der elektrischen Stromaufnahme können Steuerungssysteme ungefähr messen, wie viel Kraft von Linearantrieben ausgeübt wird. Diese Funktion ist nützlich für Linearantriebe, die Fenster öffnen und schließen, um den Strom abzuschalten und die Krafteinwirkung zu stoppen, falls die Hand oder das Hindernis einer Person den Bewegungsweg blockiert.
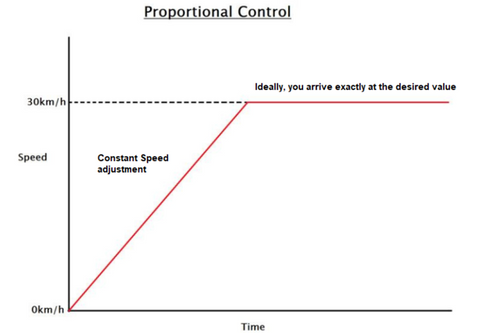
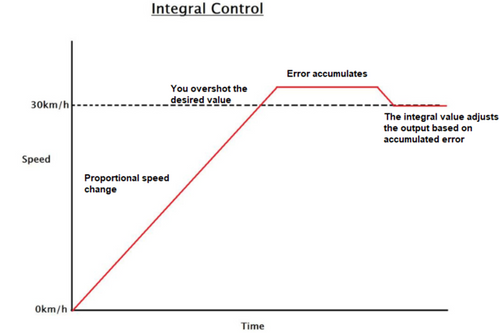
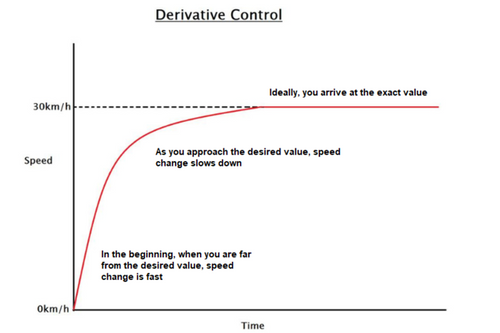
Arten von Kontrollstrategien
Steuerboxen für Linearantriebe
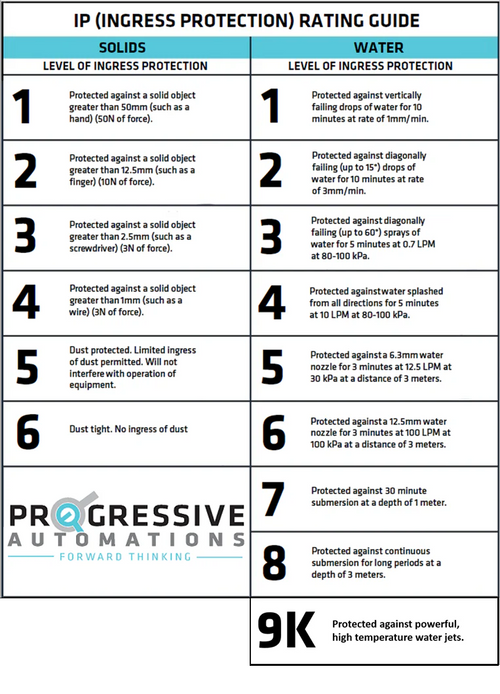
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Hall-Effekt-Typ-Steuerboxen
Lesen Sie unseren Blogbeitrag über Anwendungen der FLTCON-Steuerboxen für weitere Informationen.
