
ייתכנו מקרים שבהם תרצו להזיז אובייקט למרחק גדול יותר מאורך המהלך של המפעיל. ניתן להשיג זאת באמצעות טלסקופ מַפעִיל או שתוכלו להשתמש בפיזיקה של מינוף מכני לטובתכם. דוגמאות נפוצות לכך הן מעלית מספריים או מה שחברנו מייק סנה, יוצר ה... רובוט וול-E, עשה עם שלו פותחן דלת אוטומטי של לול תרנגולות DIY.
מינוף מכני
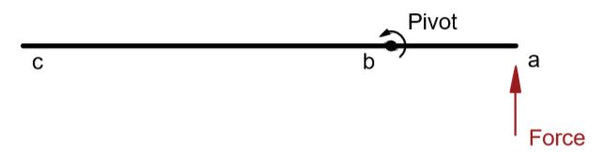
הפיזיקה העומדת מאחורי יישומים אלה משתמשת ביחס של מרחקים מנקודת הציר בכל צד. כפי שניתן לראות באיור 1, המפעיל מורכב בנקודה 'a' עם ציר קבוע בנקודה 'b'. על ידי לקיחת היחס בין 'B' ל-'A', משיגים יחס של 'R'. משמעות הדבר היא שנקודה 'c' תסתובב פי 'R' יותר ממהלך המפעיל. עם זאת, פעולה זו תגדיל את כמות הכוח הנדרשת על ידי המפעיל ואת מהירות הסיבוב של נקודה 'c' פי 'R'. זהו העיקרון העומד מאחורי אופן מינוף מפעיל ליניארי בהתבסס על אורך המהלך שלו והיכן מרכיבים אותו.
פותחן דלת אוטומטי של לול תרנגולות DIY
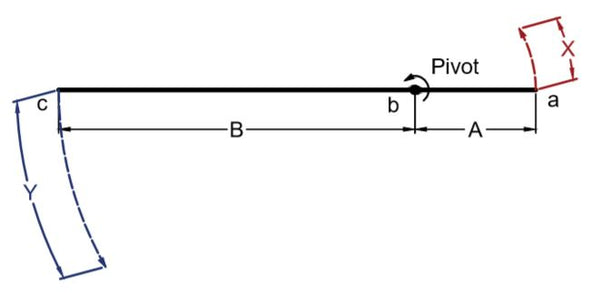
האפליקציה של מייק סנה משתמש באותו עיקרון שנדון לעיל ומספק דוגמה מצוינת להוספת איבר נוסף כדי להמיר את הסיבוב של נקודה 'c' לתנועה ליניארית. ניתן לראות באיור 2 שהאיבר העליון מסתובב סביב נקודת הציר והמפעיל דוחף בנקודה 'a'.
איור 2: רכיב עליון מסתובב סביב ציר בנקודה b
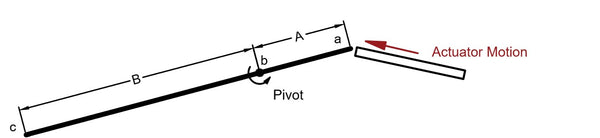
מייק ידע שהוא צריך שדלת לול התרנגולות תיפתח בערך 18 אינץ'. על מנת שהיחס 'R' יהיה שווה לשלושה, וכדי להבטיח שנקודה 'c' תנוע 18 אינץ' עם מהלך של 6 אינץ', הוא הציב את נקודת הציר ¾ לכיוון נקודה 'a' (איור 3). מייק עשה זאת על ידי מיקום הזרוע כך שיהיו 3.5 אינץ' בצד אחד של נקודת הציר ו-10.5 אינץ' (3.5 אינץ' x 3) בצד השני.
איור 3: רכיב עליון מסתובב סביב ציר בנקודה b עם ממד
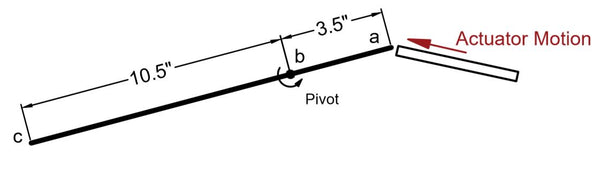
After this, Mike added another member to transform the rotational motion to linear motion. He explains, “My solution was to add another arm whose purpose is to adjust for the arc as one end moves in an arc and the other end adjusts to a linear movement.” Figure 4 is a diagram made for his DIY Chicken Coop Automatic Door Opener הפרויקט מוצג במיקומים שונים לאורך מהלך הפרויקט. שימו לב שמהירות דלת לול התרנגולות והכוח המופעל על ידי המפעיל ישתנו לאורך כל התנועה. כעת נותר להתאים את המיקום כדי להשיג את מהלך הדלת הרצוי.
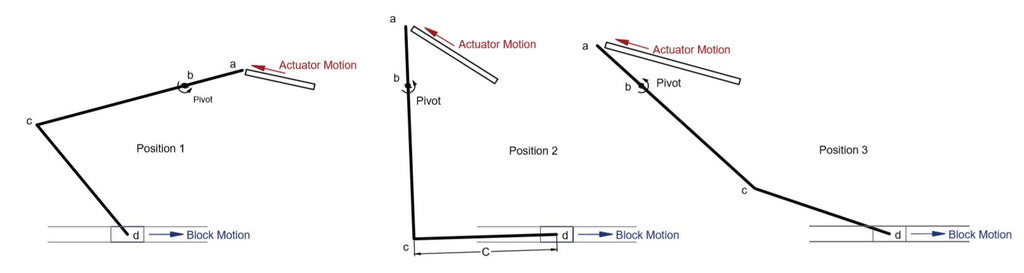
איור 4: דלת לול התרנגולות בשלושה מיקומים שונים
מעלית המספריים
מעלית מספריים היא יישום נוסף המשתמש בעיקרון זה כדי להשיג תנועה ליניארית יותר באמצעות מינוף מכני. כדי לספק דוגמה לאופן שבו ניתן למנף מפעיל ליניארי, נוצר מודל תלת-ממדי עם מפעיל עבור מעלית מספריים כדי לדמות תנועה גדולה יותר של פלטפורמה עם תנועה קצרה יחסית של המפעיל.
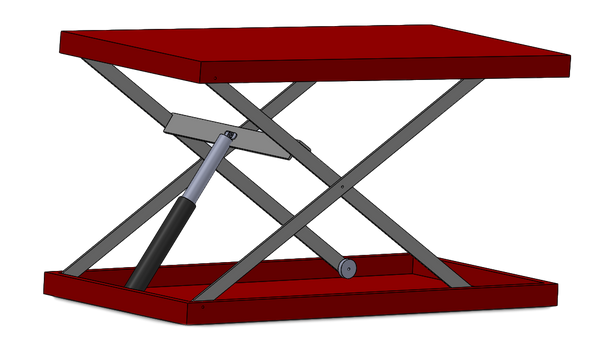
איור 5: מודל תלת-ממדי של מעלית מספריים חד-שלבית
כפי שניתן לראות באיור 5, נעשה שימוש במפעיל עבור מעלית מספריים בעלת מהלך קצר יחסית (8 אינץ' במקרה זה) כדי להרים לגובה של 36 אינץ'. מעליות מספריים פועלות לפי אותו עיקרון שבו גוף מסתובב סביב נקודת ציר ונוצר יתרון מכני. עם זאת, במקום להוסיף איבר נוסף שמטרתו פשוט לתרגם את התנועה הסיבובית של קצה אחד, תנועת קצוות האיברים מוגבלת לכיוון אופקי. התוצאה היא שכיוון הכוח הוא כלפי מעלה בלבד.
מה שמעניין במעלית מספריים הוא שאם המפעיל מורכב על החצי העליון, המעלית תתרומם כאשר המפעיל מתרחב. עם זאת, אם המפעיל מורכב על החצי התחתון, המעלית תתרומם כאשר המפעיל נסוג. כמו כן, שימו לב שככל שהמפעיל מורכב קרוב יותר למרכז החיבור של האיברים, כך המעלית תתרומם יותר, אך המפעיל ידרוש יותר כוח.
אם אתם חוקרים כיצד למנף א מפעיל ליניארי כדי להזיז חפץ למרחק רב יותר, מפעיל טלסקופי או מנגנון הרמה מספריים DIY יעשו את העבודה. עבור מפעיל למעלית מספריים או מנגנון דלת, Progressive Automations מחזיקה במגוון דגמים עם מהלכים וכוחות משתנים שיתאימו לכל צרכי ה-DIY שלכם.