ישנן שתי שיטות לבקרת מפעילים מרובים - מקבילית וסינכרונית. בקרה מקבילית מוציאה מתח קבוע לכל מפעיל, בעוד שבקרה סינכרונית מוציאה מתח משתנה לכל מפעיל.
תהליך הסנכרון של מספר רב של מפעילים נחוץ בעת יישום שני מפעילים או יותר שנעים באותה מהירות. ניתן להשיג זאת באמצעות שתי צורות של משוב מיקום - חיישני אפקט הול ופוטנציומטרים מרובי סיבובים.
שונות קלה בייצור המפעיל גורמת לשונות קלה במהירות המפעיל. ניתן לתקן זאת על ידי הזנת מתח משתנה למפעיל כדי להתאים לשתי מהירויות מפעיל. משוב המיקום נחוץ על מנת לקבוע כמה מתח נדרש להפיק לכל מפעיל.
סנכרון של מפעילים חשוב בעת שליטה בשני מפעילים או יותר, כאשר נדרשת בקרה מדויקת. לדוגמה, יישומים הדורשים מפעילים מרובים כדי להזיז עומס תוך שמירה על פיזור עומס שווה על פני כל מפעיל. אם נעשה שימוש בבקרה מקבילה בסוג זה של יישום, פיזור עומס לא שוויוני עלול להתרחש עקב מהירויות מהלך משתנות ובסופו של דבר לגרום לכוח מופרז על אחד המפעילים.
חיישן אפקט הול
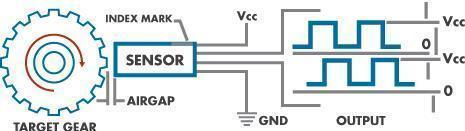
לסיכום תיאוריית אפקט הול, אדווין הול (שגילה את אפקט הול), קבע כי בכל פעם שמופעל שדה מגנטי בכיוון הניצב לזרימת הזרם החשמלי במוליך, נוצר הפרש מתח. ניתן להשתמש במתח זה כדי לזהות האם החיישן נמצא בקרבת מגנט או לא. על ידי חיבור מגנט לציר המנוע, החיישנים יכולים לזהות מתי הציר מקביל להם.
באמצעות מעגל קטן, ניתן להפיק מידע זה כגל מרובע, אשר ניתן לספור כמחרוזת של פולסים. על ידי ספירת פולסים אלה ניתן לעקוב אחר מספר הפעמים שהמנוע הסתובב וכיצד המנוע נע.

בחלק ממעגלים חשמליים מסוג אפקט הול יש מספר חיישנים. מקובל שיהיו להם שני חיישנים בזווית של 90 מעלות, מה שמביא לפלט ריבועי. על ידי ספירת הפולסים הללו ובדיקת הקודם, ניתן לדעת את כיוון הסיבוב של המנוע. לחלופין, ניתן פשוט לנטר את שני החיישנים ולקבל ספירות נוספות לבקרה מדויקת יותר.
ניתן להשיג סנכרון באמצעות משוב חיישן אפקט הול באמצעות אוטומציות מתקדמות בקרת מפעיל כפולה מסונכרנת PA-40 עם אפקט הול קוּפסָה.
סנכרון פוטנציומטר
פוטנציומטרים מרובי סיבובים, המכונים גם ריאוסטטים או נגדים משתנים, מספקים ייצוג אנלוגי של מיקום המפעיל. החיישן מקובע למערכת גלגלי שיניים המחוברת למנוע, אשר מסובבת את הפוטנציומטר ולכן מתאימה את דירוג ההתנגדות באופן פרופורציונלי לכמות התנועה שהמפעיל ביצע. ניתן למדוד את שינוי ההתנגדות/מתח הכולל כדי לקבל טווח מלא של הערך האנלוגי המייצג את מרחק התנועה הכולל של המפעיל. הפוטנציומטרים המשמשים במפעילים של Progressive Automations הם 10KΩ.
למטרות סנכרון, נקרא הערך האנלוגי של כל פוטנציומטר, אשר לאחר מכן ניתן להשתמש בו על ידי תיבת תוכנית/בקרה כדי לקבוע את מתח היציאה הנדרש לכל מפעיל. ניתן להשיג סנכרון פוטנציומטר באמצעות מיקרו-בקר תִכנוּת.
חשיבות הסנכרון
בנקודה זו, מוסברות שיטות הסנכרון. כעת נרצה לבחון מדוע סנכרון חשוב. כאשר נדרשת המטרה של שימוש במפעילים מרובים כדי לדחוף או למשוך עומס, עלינו לוודא שהמפעילים מתאימים את המהירויות במדויק. דיוק זה במהירות המפעיל נחוץ כדי להבטיח חלוקת עומס שווה.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two מפעיל ליניארי PA-04 IP-66 with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
רכיבי בקרה סופיים
חשיבות הסנכרון של מפעילים מסתכמת בהבטחת תנועה אחידה של מספר מפעילים ובמניעת כשל במפעיל.
תיבת בקרת אפקט הול
כאשר מפעילים מותאמים אישית עם חיישני אפקט הול, ה- תיבת בקרה PA-40 ניתן להשתמש בו למטרות סנכרון אפקט הול.
מיקרו-בקר ארדואינו
ניתן ליישם בקרת מפעיל באמצעות תכנות ארדואינו. למידע נוסף, אנא בקרו בקישורים הבאים:
אם יש לכם שאלות נוספות, אל תהססו לפנות להנדסה תְמִיכָה ולקבל את התשובה המיידית.