
A PA-18 Track Linear Actuator a legnagyobb fix hosszúságú aktuátor és gyakran használják egyedi szekrényekben, otthonautomatizálásban és robotikában. Könnyen vezérelhet egy aktuátort egy Arduino tábla, és ez a cikk bemutatja, hogyan lehet Arduino-vezérelt lineáris aktuátor amely könnyen adaptálható az alkalmazásához!
Szükséges hardver
Az Arduino által vezérelt lineáris aktuátorhoz a következő hardverelemekre van szükség, amelyek mindegyike megvásárolható a Progressive Automations-tól:
- 1x PA-18 pálya lineáris működtető
- 1x Arduino Uno
- 1x MegaMoto Plus H-híd
- 1x 12 VDC tápegység
- 2x Pillanatnyi nyomógomb
- Áthidaló vezetékek
Rendszerkábelezés
Az ebben a beállításban használt aktuátor 12 VDC bemeneti feszültséget és teljes terhelés mellett akár 8 A áramot igényel. Ezek az értékek jóval magasabbak, mint amit egy Arduino mikrovezérlő képes leadni, és „varázsfüst” távozását okozzák az Arduinóból. Az Arduino károsodásának elkerülése érdekében a MegaMoto Plus H-hidat használják. A H-híd képes kezelni a tápellátási követelményeket, és könnyen használható egy aktuátor vezérlésére egy Arduinóval.
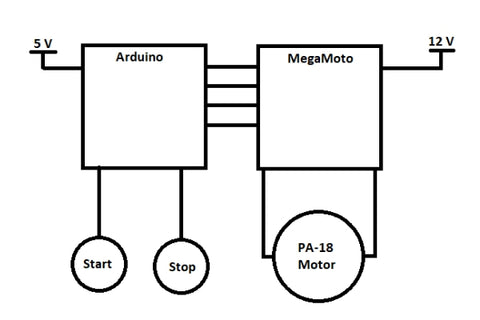
Ennél a rendszernél az Arduino és a MegaMoto Plus H-híd, valamint a két nyomógomb között csatlakozások vannak. Minden nyomógombhoz egyetlen bemenet szükséges, amelyeket az Arduino elérhető GPIO-kivezetései közül lehet kiválasztani. A H-hídnak négy csatlakozása van az Arduino felé, három kimenete és egy bemenete van. A H-híd által használt kivezetések előre beállítottak, és nem módosíthatók.
Blokkdiagram
Az alábbi blokkdiagram röviden ismerteti a tápellátási követelményeket és a csatlakozásokat. Az Arduino 5 V-os tápegységről, a H-Bridge pedig 12 V-ról működik. Ha két különálló tápegységet használ, fontos, hogy a földelésük közös legyen, hogy elkerüljük a lebegő földelést.
Arduino parancsok
Az Arduino IDE-t asztali számítógépre vagy laptopra kell telepítened. Ne feledd, hogy a rendszerkábelezésed befolyásolja az Arduino kódodat. Ezért fontos, hogy kétszer is ellenőrizd a csatlakozásokat, és összehasonlítsd azokat a beírt kóddal.
A pinMode Arduino parancs segítségével definiálhatók a lábak bemenetként vagy kimenetként. Annak megváltoztatásához, hogy az Arduino milyen jelet küld egy adott lábra, a digitalWrite és analogWrite parancsokat használjuk. Ezenkívül a digitalRead és analogRead parancsokat akkor használjuk, amikor az Arduinonak ellenőriznie kell egy adott lábon lévő jelet.
Az alábbi programban a digitalWrite parancs a H-híd engedélyezésére vagy letiltására, valamint a nyomógombokhoz használt csatlakozókivezetések konfigurálására szolgál. Az analogWrite parancs a H-híd PWM jelének értékét állítja be 0 és 255 közötti tartományban. A digitalRead parancs annak ellenőrzésére szolgál, hogy a nyomógombokat megnyomták vagy elengedték-e. Az analogRead parancs a működtető motor áramfelvételének mérésére szolgál, amely ellenőrzi, hogy a működtető mikor van a löket végén.
Arduino kód
A következő szakasz egy Arduino által vezérelt lineáris aktuátor programdefinícióit, beállítását, fő ciklusát és nyomógombos funkcióit mutatja be. Fontos, hogy soronként végigvezesd a kódot, hogy megértsd, hogyan működik. Ez a megértés lehetővé teszi, hogy az alkalmazásodnak megfelelően módosításokat végezz.
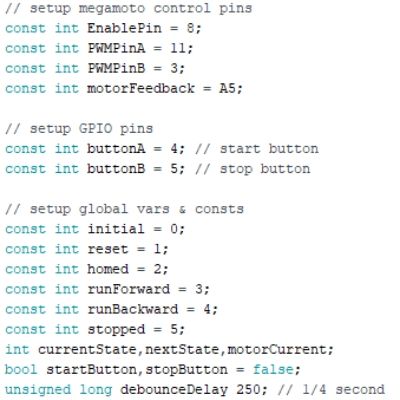
Programdefiníciók
Ez a kódrészlet a lábkapcsolatok beállítását ismerteti. Ellenőrizd kétszer, hogy az Arduino kártyához való csatlakozásaid megfelelnek-e a megadott számoknak. Ezek az értékek módosíthatók attól függően, hogy csatlakoztatsz-e további alkatrészeket az Arduinohoz, amelyekhez esetleg a lábkapcsolatok eltolása szükséges lehet.
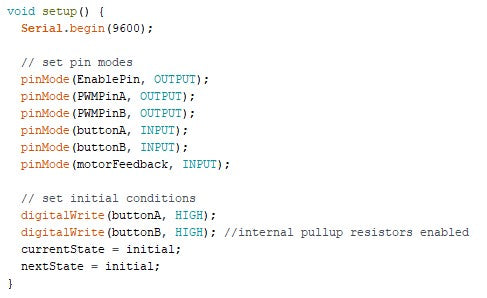
Programbeállítás
Ez a kódrészlet a csatlakoztatott lábakat bemenetként vagy kimenetként konfigurálja. A két gomb HIGH (magas) vagy LOW (alacsony) értékre állítható attól függően, hogyan csatlakoztattad őket (felhúzó vagy lehúzó). Bár az Arduino belső felhúzó ellenállásokkal rendelkezik, érdemes lehet egy külső ellenállást hozzáadni a kapcsolók pergéscsillapítására és a téves aktiválások megelőzésére.
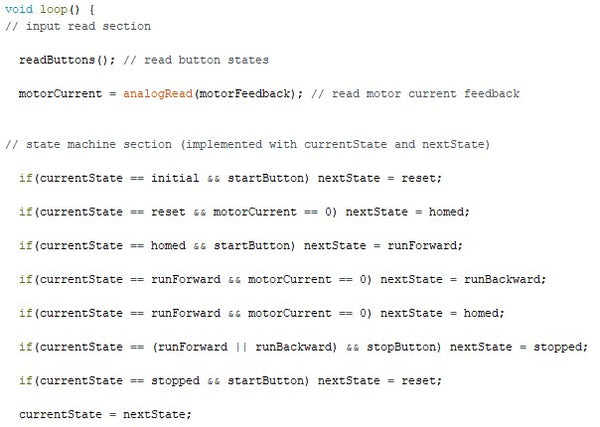
Fő hurok
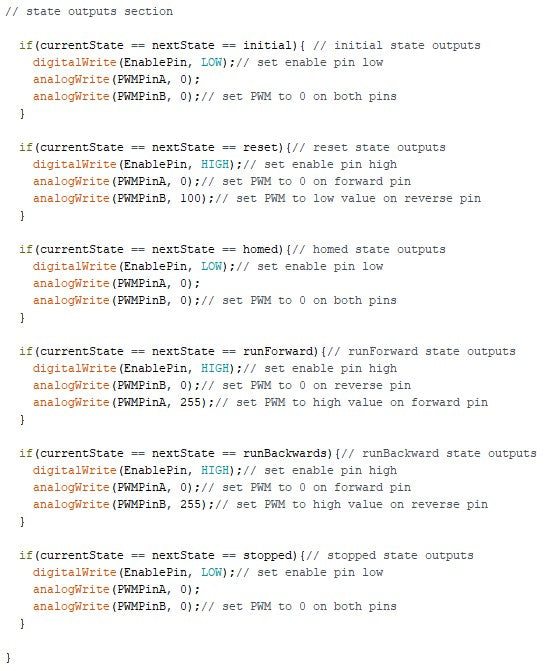
A fő ciklus folyamatosan ellenőrzi, hogy megnyomták-e a gombokat, és a nyomógombos függvény eredményétől függően lefuttat egy adott kódrészletet. Egy állapotgép szakasz is tartozik hozzá, amely meghatározza, hogy mit csinál az Arduino által vezérelt lineáris aktuátor, és hogyan kell reagálnia a bemenetek (azaz a nyomógombok) alapján.
Nyomógombos funkciók
Ezek a függvények digitálisan kiolvassák a nyomógombok állapotát, hogy egy Arduino segítségével vezéreljenek egy aktuátort. Minden nyomógombfüggvényhez tartozik egy pergésgátló hurok a fő if utasításon belül, hogy megakadályozza a hibás gyújtást és a rossz jel küldését az Arduino-nak. Ezeknek a függvényeknek a kimenete egy logikai érték. Például, ha megnyomják a start gombot, a startButton értéke igazra változik. A logikai értéket ezután a fő ciklus használja a további döntések meghozatalához.

Záró szavak
A rendszer funkcionalitása túlmutat a cikkben bemutatottakon. Arduino mikrovezérlő A MegaMoto Plus H-híddal sokkal bonyolultabb vezérlési rutinok valósíthatók meg. Ez a beállítás képes változtatható sebességszabályozásra az analogWrite parancs segítségével a PWM jel beállításához. A működtető motor árama monitorozható, hogy terhelésérzékeléshez felhasználható legyen további parancsok kiváltására.
Ezenkívül további érzékelők is csatlakoztathatók egy fejlett Arduino által vezérelt lineáris aktuátorhoz. Például egy ultrahangos érzékelő csatlakoztatható a motor elindításához/leállításához, ha bizonyos távolságra van, vagy számos más izgalmas funkció aktiválására is használható. A lehetőségek végtelenek. Ha azonban kevés a láb az Arduinón, választhat egy másik Arduino modellt. Alternatív megoldásként több Arduino is összekapcsolható, hogy kommunikáljanak egymással és a különböző komponensekkel. Ez a módszer azonban megfelelő mennyiségű programozási tapasztalatot igényel.
További információkért kérjük, küldjön nekünk e-mailt a következő címre: sales@progressiveautomations.com, vagy hívjon minket az 1-800-676-6123-as telefonszámon.