A többszörös aktuátorok vezérlésének két módja van – párhuzamos és szinkron. A párhuzamos vezérlés állandó feszültséget ad ki minden aktuátornak, míg a szinkron vezérlés változó feszültséget ad ki minden aktuátornak.
Többszörös szinkronizálás folyamata aktuátorok szükséges, ha két vagy több aktuátort azonos sebességgel kell mozgatni. Ez kétféle pozíció-visszacsatolással érhető el – Hall-effektus-érzékelőkkel és többfordulatos potenciométerekkel.
A működtető gyártásának kismértékű eltérése a működtető sebességének kismértékű eltérését eredményezi. Ez korrigálható úgy, hogy a működtetőre két működtető sebességhez igazodó változó feszültséget adunk ki. A pozíció-visszacsatolás szükséges annak meghatározásához, hogy mekkora feszültséget kell kiadni az egyes működtetőkhöz.
Aktuátorok szinkronizálása fontos két vagy több aktuátor vezérlése esetén, ahol precíz vezérlésre van szükség. Például olyan alkalmazásoknál, amelyekhez több aktuátorra lenne szükség a terhelés mozgatásához, miközben az egyes aktuátorok között egyenlő terheléselosztást kell fenntartani. Ha ilyen típusú alkalmazásban párhuzamos vezérlést alkalmaznak, egyenlőtlen terheléselosztás léphet fel a változó löketsebességek miatt, és végső soron túlzott erőt okozhat az egyik aktuátoron.
Hall-effektus-érzékelő
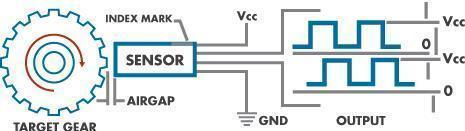
A Hall-effektus elméletének összefoglalásaként Edwin Hall (a Hall-effektus felfedezője) kijelentette, hogy amikor egy vezetőben az elektromos áram áramlására merőleges irányban mágneses mezőt alkalmazunk, feszültségkülönbség indukálódik. Ez a feszültség felhasználható annak érzékelésére, hogy az érzékelő mágnes közelében van-e vagy sem. A motor tengelyéhez mágnest rögzítve az érzékelők érzékelni tudják, ha a tengely párhuzamos velük.
Egy kis áramköri lap segítségével ez az információ négyszöghullámként kimenetelhető, amely impulzusok sorozataként számolható. Ezen impulzusok számlálásával nyomon követhető, hogy a motor hányszor forgott meg, és hogyan mozog.

Néhány Hall-effektusú áramköri lapon több érzékelő található. Gyakori, hogy 2 érzékelő van 90 fokban, ami kvadratúra kimenetet eredményez. Az impulzusok számlálásával és annak meghatározásával, hogy melyik következik be előbb, meg lehet állapítani a motor forgási irányát. Vagy egyszerűen figyelheti mindkét érzékelőt, és több számlálást kaphat a pontosabb vezérlés érdekében.
A Hall-effektus-érzékelő visszacsatolásával történő szinkronizálás progresszív automatizálással érhető el. PA-40 szinkronizált kettős Hall-effektusú aktuátorvezérlés doboz.
Potenciométer szinkronizálása
A többfordulatos potenciométerek, más néven reosztátok vagy változtatható ellenállások, analóg módon ábrázolják a működtető pozícióját. Az érzékelő egy hajtóműrendszerhez van rögzítve, amely a potenciométert forgató motorhoz van rögzítve, és így arányosan állítja be az ellenállást a működtető által megtett úttal. A teljes ellenállás/feszültségváltozás mérhető, így az analóg érték teljes skáláját megkapjuk, amely a működtető teljes lökethosszát jelenti. A Progressive Automations működtetőiben használt potenciométerek 10 kΩ-osak.
Szinkronizálás céljából minden potenciométer analóg értékét leolvassák, amelyet egy program/vezérlődoboz felhasználhat az egyes működtetőkhöz szükséges feszültségkimenet meghatározásához. A potenciométer szinkronizálása a következőképpen érhető el: mikrovezérlő programozás.
A szinkronizáció fontossága
Ezen a ponton a szinkronizálás módszereit ismertetjük. Most azt szeretnénk megvizsgálni, hogy miért fontos a szinkronizálás. Amikor több aktuátort kell használni egy teher tolására vagy húzására, biztosítanunk kell, hogy az aktuátorok pontosan megegyezzenek a sebességgel. Ez a pontosság az aktuátor sebességében szükséges az egyenletes teherelosztás biztosításához.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two PA-04 IP66 lineáris működtető with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Végső szabályozási elemek
A működtetők szinkronizálásának fontossága lényege, hogy biztosítsa több működtető egyenletes mozgását és megakadályozza a működtető meghibásodását.
Hall-effektus vezérlődoboz
Amikor a működtetőket HALL-effektusú érzékelőkkel testreszabják, a PA-40 vezérlődoboz Hall-effektus szinkronizálási célokra használható.
Arduino mikrokontroller
Az aktuátorok vezérlése Arduino programozással valósítható meg. További információkért kérjük, látogassa meg az alábbi linkeket:
Ha további kérdései vannak, forduljon bizalommal a mérnöki csapathoz támogatás és azonnal megkapod a választ.