







Atuador linear com Feedback IP66
Atuador linear com Feedback IP66
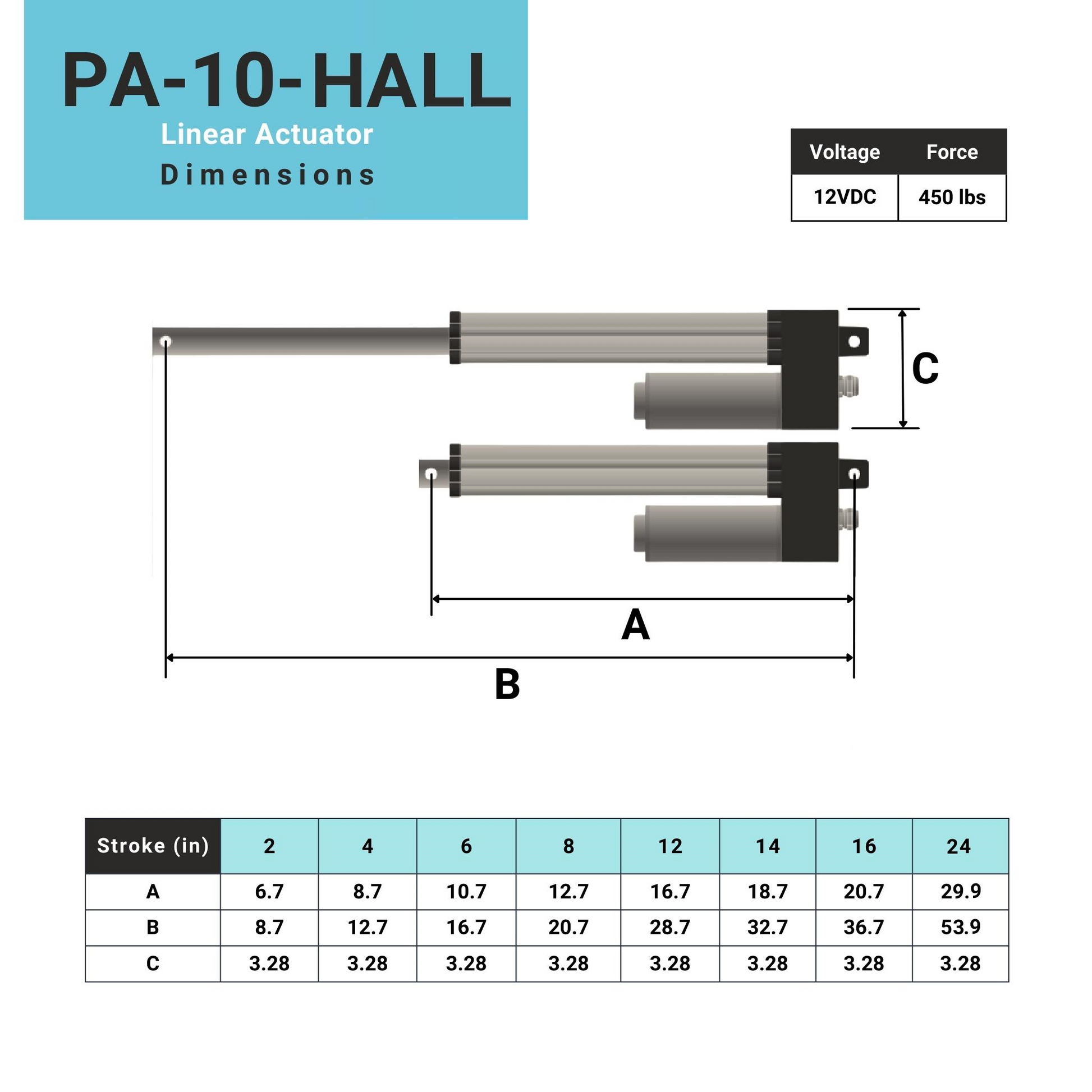
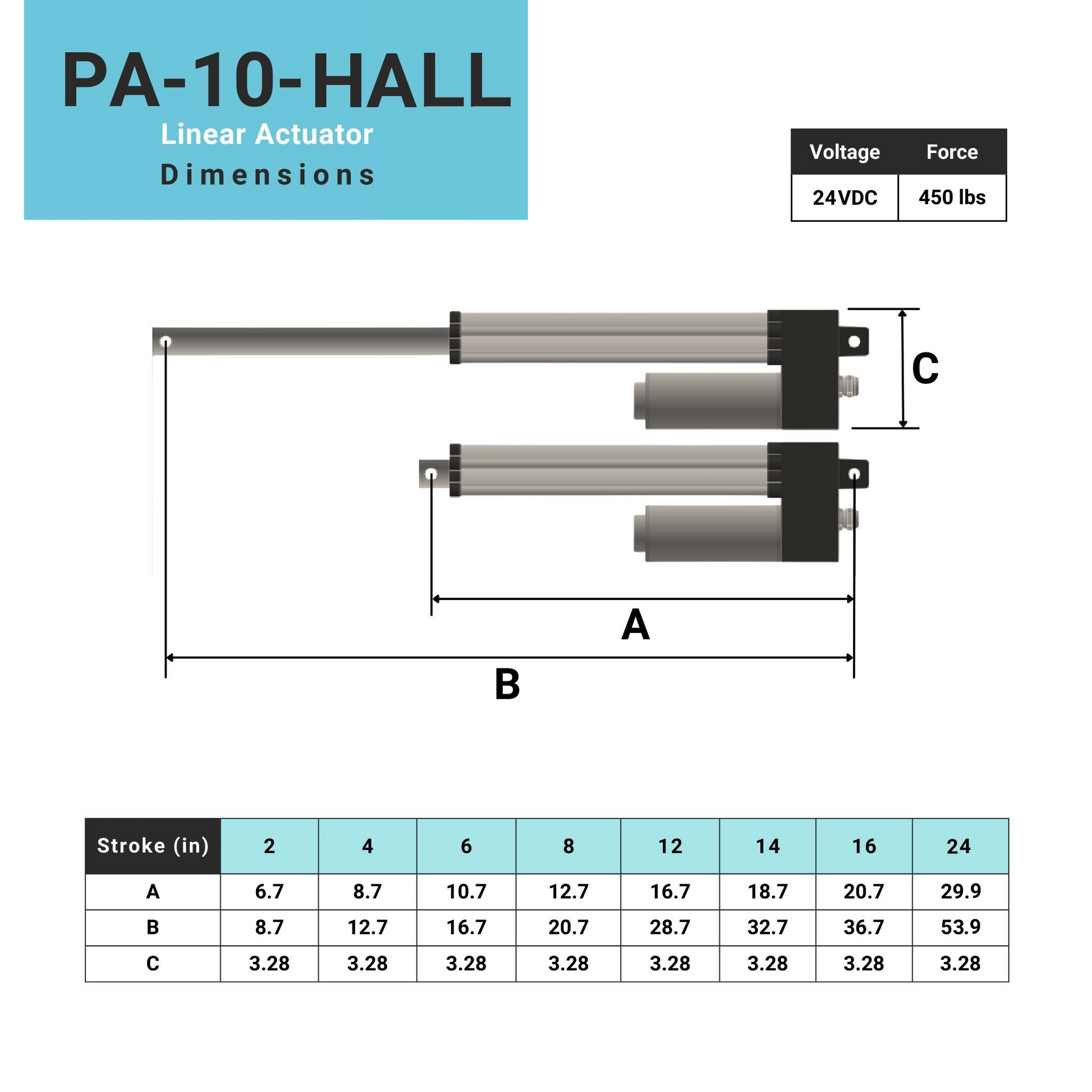
Modelo: PA-10-SALÃO

Não foi possível carregar a disponibilidade de retirada



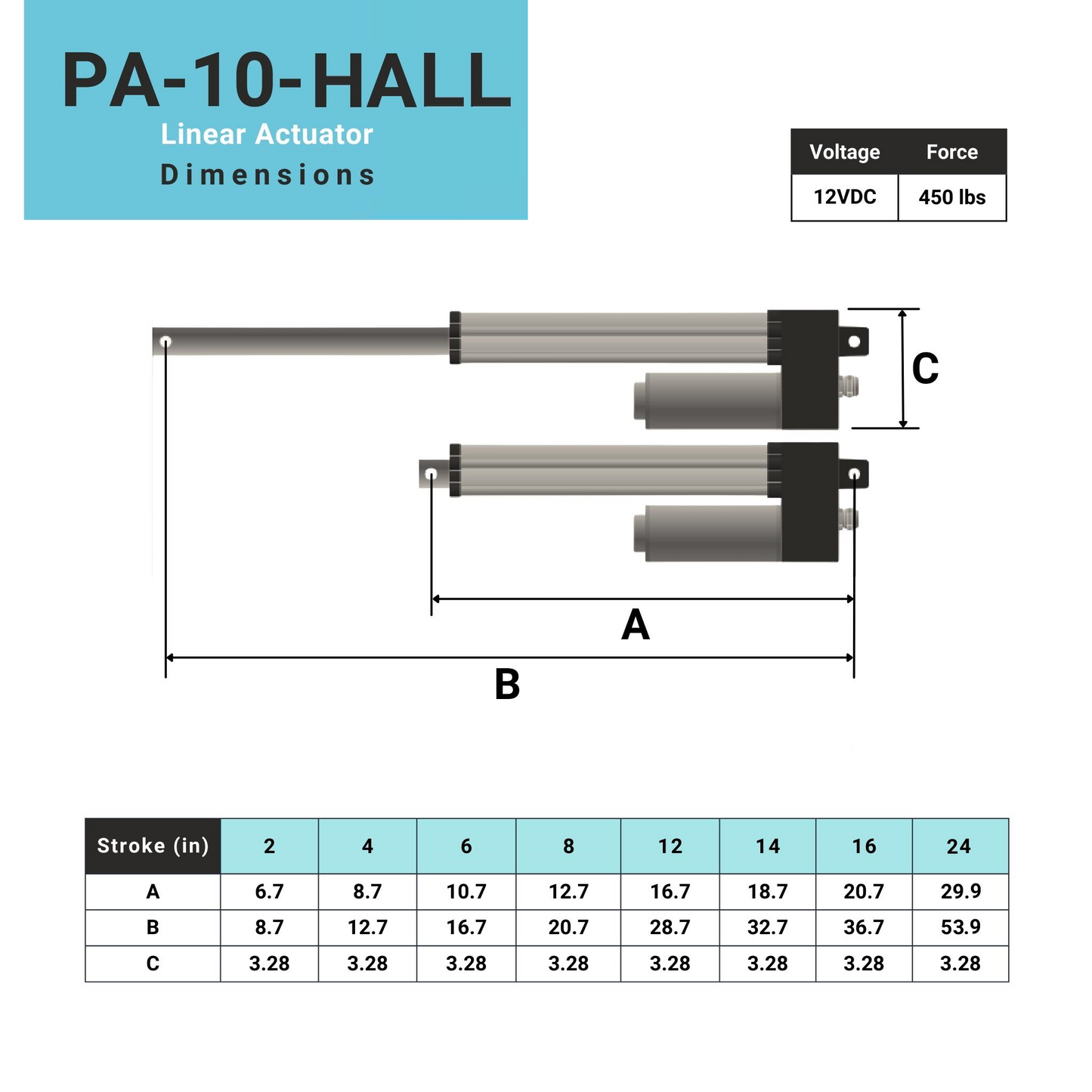
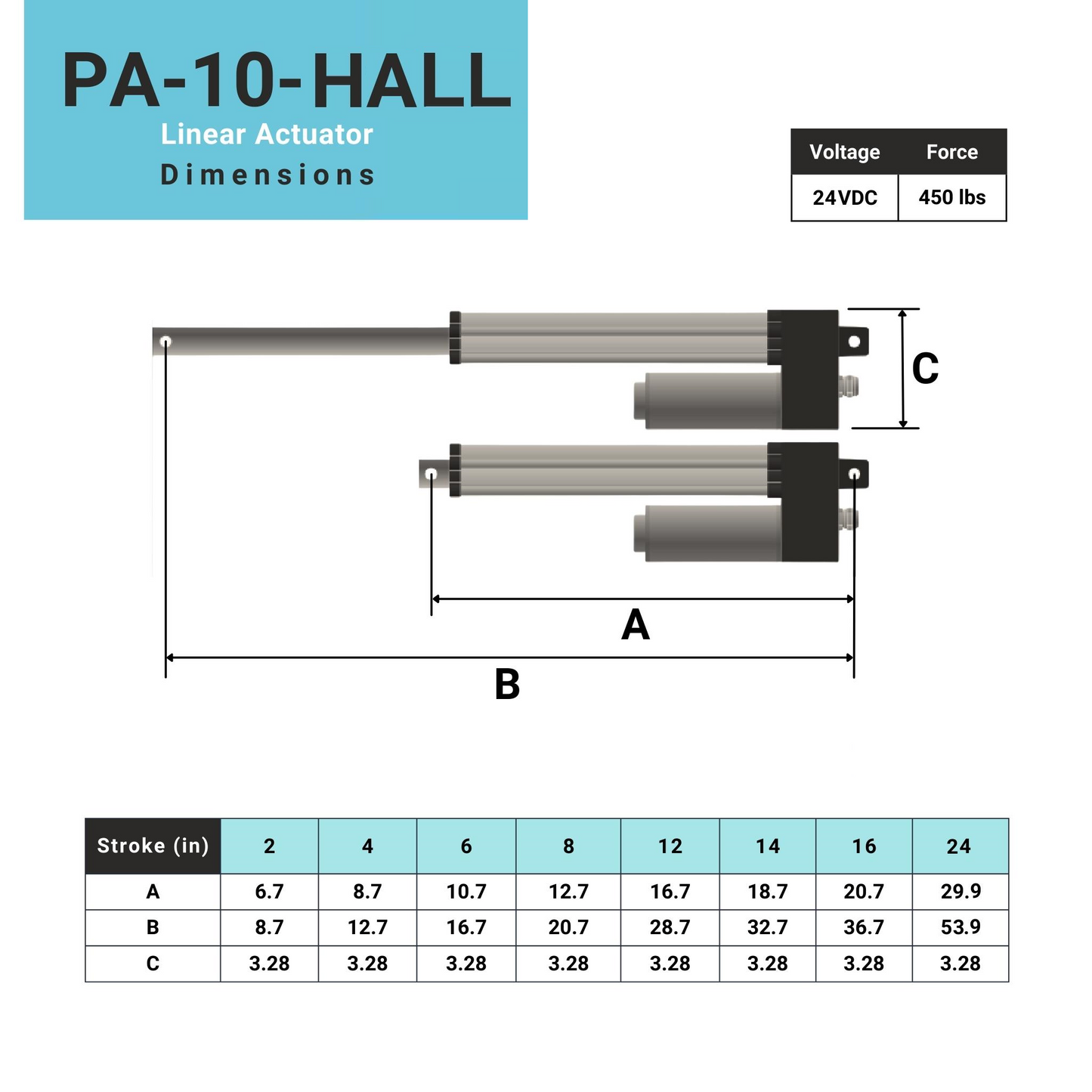





O PA-10-HALL utiliza feedback por efeito Hall proprietário e integrado, permitindo sincronização, controle de velocidade e controle de posição. O feedback por efeito Hall é crucial em aplicações nas quais vários atuadores precisam se deslocar em sincronia. Tanto o PA-10 padrão quanto o PA-10-HALL possuem alto grau de proteção IP66 para suportar ambientes externos rigorosos. Em combinação com seu tamanho compacto e alta capacidade de força, o PA-10-HALL é excelente para aplicações marítimas, automotivas e agrícolas.
Para aplicações que exigem maior resistência à corrosão, o PA-10-HALL pode ser encomendado sob medida em uma versão com classificação de névoa salina, que conta com carcaça com revestimento de porcelana especializado. Essa versão foi rigorosamente testada por até 400 horas de exposição à névoa salina, garantindo que terá desempenho nos ambientes mais exigentes.
Para mais informações sobre especificações, desenhos dimensionais e opções de personalização, consulte a ficha técnica do PA-10-HALL. Consulte o Guia de Grau de proteção IP para mais informações sobre essas classificações.
OPÇÕES DE MONTAGEM:
O suporte BRK-09, compatível com o PA-10-HALL, pode ser usado nos locais de montagem do Recorrido ou da extremidade do motor e permite rotação superior a 180°.
SISTEMAS DE CONTROLE:
O PA-10-HALL é compatível com as caixas de controle sem fio PA-40, PA-40-24VDC e PA-41 com sensor de efeito Hall, bem como com a série de caixas de controle com fio FLTCON. Para mais informações sobre nossas caixas de controle plug-and-play e microcontroladores de desenvolvimento, visite a página de sistemas de controle.
*Nossos PA-10-HALL atuadores com motores de 24 VCC são compatíveis com as caixas de controle PA-40, PA-40-24VDC, PA-41-4-12V24V e a série FLTCON para múltiplos atuadores que precisam se mover na mesma velocidade de forma sincronizada. Para mais informações, entre em contato com sales@progressiveautomations.com para confirmar a compatibilidade deste produto com as caixas de controle da Progressive Automations.
Opções personalizadas
Procurando um atuador, mas as especificações não correspondem exatamente ao que você precisa? Temos uma ampla lista de recursos de personalização para garantir que você obtenha exatamente o que precisa para o seu projeto. Baixe a ficha técnica deste produto e saiba mais sobre suas opções de personalização!
O PA-10-HALL utiliza feedback por efeito Hall proprietário e integrado, permitindo sincronização, controle de velocidade e controle de posição. O feedback por efeito Hall é crucial em aplicações nas quais vários atuadores precisam se deslocar em sincronia. Tanto o PA-10 padrão quanto o PA-10-HALL possuem alto grau de proteção IP66 para suportar ambientes externos rigorosos. Em combinação com seu tamanho compacto e alta capacidade de força, o PA-10-HALL é excelente para aplicações marítimas, automotivas e agrícolas.
Para aplicações que exigem maior resistência à corrosão, o PA-10-HALL pode ser encomendado sob medida em uma versão com classificação de névoa salina, que conta com carcaça com revestimento de porcelana especializado. Essa versão foi rigorosamente testada por até 400 horas de exposição à névoa salina, garantindo que terá desempenho nos ambientes mais exigentes.
Para mais informações sobre especificações, desenhos dimensionais e opções de personalização, consulte a ficha técnica do PA-10-HALL. Consulte o Guia de Grau de proteção IP para mais informações sobre essas classificações.
OPÇÕES DE MONTAGEM:
O suporte BRK-09, compatível com o PA-10-HALL, pode ser usado nos locais de montagem do Recorrido ou da extremidade do motor e permite rotação superior a 180°.
SISTEMAS DE CONTROLE:
O PA-10-HALL é compatível com as caixas de controle sem fio PA-40, PA-40-24VDC e PA-41 com sensor de efeito Hall, bem como com a série de caixas de controle com fio FLTCON. Para mais informações sobre nossas caixas de controle plug-and-play e microcontroladores de desenvolvimento, visite a página de sistemas de controle.
*Nossos PA-10-HALL atuadores com motores de 24 VCC são compatíveis com as caixas de controle PA-40, PA-40-24VDC, PA-41-4-12V24V e a série FLTCON para múltiplos atuadores que precisam se mover na mesma velocidade de forma sincronizada. Para mais informações, entre em contato com sales@progressiveautomations.com para confirmar a compatibilidade deste produto com as caixas de controle da Progressive Automations.
Opções personalizadas
Procurando um atuador, mas as especificações não correspondem exatamente ao que você precisa? Temos uma ampla lista de recursos de personalização para garantir que você obtenha exatamente o que precisa para o seu projeto. Baixe a ficha técnica deste produto e saiba mais sobre suas opções de personalização!
Seguir um conjunto de normas é fundamental para que as empresas garantam que seus produtos e serviços atinjam um nível de qualidade que promova a satisfação do cliente. Na Progressive Automations, buscamos sempre o melhor para nossos clientes e nos esforçamos por melhorias contínuas. Por isso, temos o prazer de anunciar que a Progressive Automations agora é certificada pela ISO 9001:2015!
Qualidade em que você pode confiar – Saiba maisFichas técnicas

PA-10 Manual do usuário
Modelos 2D/3D

Modelos 3D
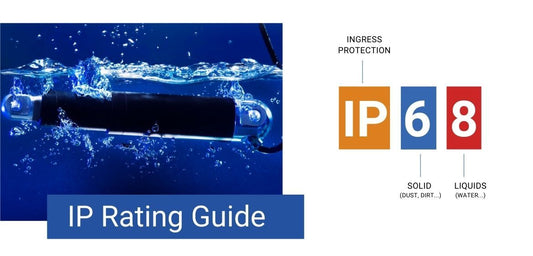
Guia completo dos graus de proteção IP
Algumas das perguntas mais frequentes que recebemos estão relacionadas à proteção e aos graus de ...

Como evitar danos causados pela água ao seu Atuador
Atuadores lineares elétricos são usados para automatizar diferentes tipos de aplicações em difere...

Visão geral do produto PA-10
Apresentando o PA-10 Às vezes, um atuador pode ser usado em aplicações expostas a ambientes agres...

Usando atuadores em um reboque de camping para veículos de aventura
Overlanding é uma maneira empolgante de as pessoas explorarem trilhas remotas e curtirem uma jorn...
Depending on your application, there are different specification requirements you should consider when determining the linear actuator you need. These requirements include force, stroke, speed and mounting dimensions. For detailed actuator information, you can refer to either the datasheet or the specification table located on the selected actuator's product page. You can also contact us to speak with one of our expert engineers.
Ciclo de trabalho é a fração do período de operação em que um atuador linear pode permanecer ativo. Você pode calcular o Ciclo de trabalho de um atuador linear usando a seguinte equação: Ciclo de trabalho (%) = (Tempo em que o atuador linear fica ativo) / (Tempo de um período de operação)
Por exemplo: com um Ciclo de trabalho de 25%, um atuador pode operar por 5 minutos continuamente antes de precisar descansar por 15 minutos antes de voltar a operar.
Recorrido é a distância percorrida pela haste de extensão. Para encontrar o comprimento de Recorrido necessário, meça sua aplicação da posição totalmente retraída até a posição totalmente estendida. A diferença será o comprimento de Recorrido necessário.
Sempre recomendamos adquirir um atuador com uma classificação de força maior do que a exigida pela aplicação. Se não tiver certeza dos seus requisitos de força, este artigo pode ajudar a calcular: Como calcular a força para encontrar o atuador linear certo
Sim, isso é possível. No entanto, depende das unidades que você está utilizando. Para sincronizar atuadores, é necessário algum tipo de Feedback, como um potenciômetro ou sensores de efeito Hall. Para mais informações, veja abaixo alguns de nossos conteúdos principais sobre sincronização de atuadores lineares.
A caixa de controle que você escolher deve ser capaz de fornecer tensão e Corrente suficientes para o seu atuador. Se você não tiver certeza das especificações, por favor, entre em contato conosco.
Alternativamente, você também pode encontrar caixas de controle compatíveis na página do produto do atuador linear selecionado.
Backdriving is when an actuator starts sliding down under load, when it is either overloaded or when the actuator has been damaged. Watch the video.
What Does Dynamic and Static Load Ratings Mean?Dynamic load rating is the amount of weight an actuator can pull or push safely when being powered. Static load rating is the amount of weight the actuator can hold or withstand without back driving when it is not being powered. For example, let's just say you have an actuator installed on a window and the static load rating of the actuator is 100lbs, it could experience backdriving when there is a high wind event, which means there will be more pressure exerted on the actuator which would exceed the 100lbs load rating of the actuator.
What Is Lateral Loading?Lateral loading is when the actuator experiences forces from the lateral plane. Actuators are not meant to handle lateral forces at all so if it experiences any lateral forces, it will likely damage the actuator or bend the rod. So it's advised never to use lateral forces and always make sure the actuator is fully in line or in sync with your application, so it does not take any load other than the axial load. Watch the video.




