Rörelsesimulatorer är viktiga tillgångar för teknisk analys, utbildning, utbildning och underhållning eftersom de återskapar en realistisk känsla av saker i rörelse. Linjära ställdon är en populär lösning för att driva mekaniska operationer på grund av de betydande fördelar de kan erbjuda; rörelsesimulatorer kan dock integreras på många olika sätt för en mängd olika användningsområden. I den här artikeln kommer vi att ta upp några exempel på rörelsesimulatorer för att bättre förstå hur rörelsesimulatorer och linjära ställdon fungerar tillsammans.
Användningsfall
Det finns många sätt att implementera elektriska linjära ställdon till rörelsesimulatorer. För att bara nämna några exempel har ställdon använts för att driva den linjära rörelse som finns i:
- Flygsimulatorer
- Militära fordonssimulatorer
- Attraktionerna i temaparken
- Kör-/racingsimulatorer
- Rymdfarkostsimulatorer
- Stewart-plattformarna
- Olika arkadspel
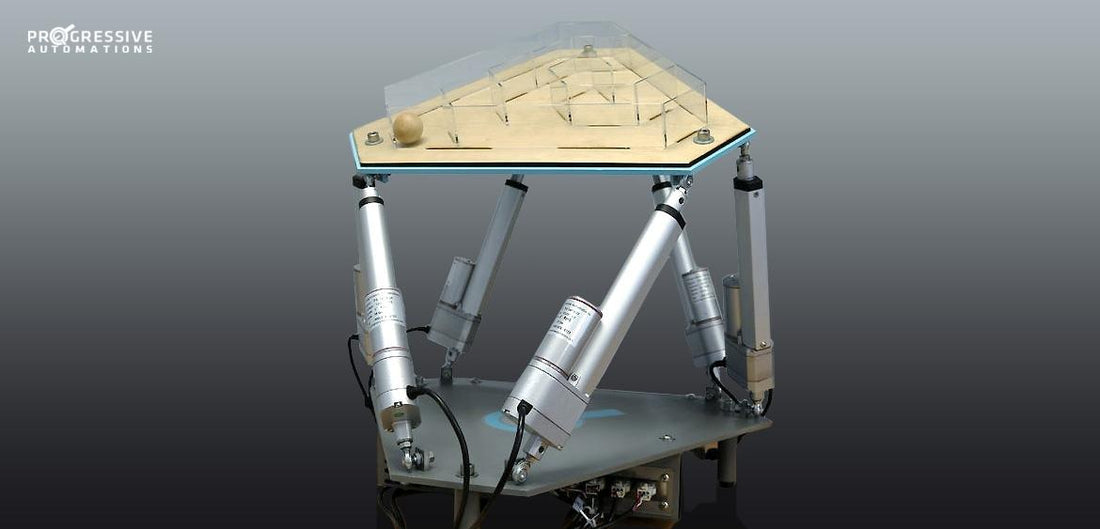
Sexaxlig plattform med linjära ställdon (Stewart-plattform)

Stolt sponsrad av Progressiva automatiseringar, UBC:s institution för teknisk fysik Stewart-plattformen möjliggör en intressant och interaktiv upplevelse att lära sig om linjär rörelsekontroll samt fysiken som är involverad i robotik.
Genom att integrera våra PA-14P återkopplingslinjära ställdon, positionsinformation kan läsas igenom återkopplingssignaler från ställdonets inbyggda potentiometrarAtt ha positionsinformation gör det möjligt för ett system att avgöra om ställdonen har nått de erforderliga positionerna korrekt för att minimera fel och möjliggöra högre repeterbarhet. Även om enheter som Halleffektsensorer och accelerometrar kan resultera i högre noggrannhet, deras integrationsprocess är mer komplex medan potentiometeråterkopplingsalternativen gav tillräcklig noggrannhet med enklare integration. Dessutom, PA-14P-6-35 Modellerna erbjöd också en hastighet (2,00 tum/sek utan last) och kompakt storlek som passade för denna applikation som krävde en slaglängd på 6 tum.

De LC-062 Arduino Due mikrokontroller kopplar de sex ställdonen tillsammans med två MultiMoto Arduino Shields och till värddatorn via en USB-seriell anslutning. Eftersom våra Multimoto-kort kunde hantera maximalt fyra oberoende styrda kanaler åt gången, delades de sex linjära ställdonen som krävdes för projektet upp i tre per kort. Ställdonens rörelser styrdes sedan via ett PID-återkopplingssystem med PA-14P:s potentiometeravläsningar som ingångar.

Tillsammans med det anpassade grafiska användargränssnittet (GUI) ger en Leap Motion Controller, som använder tre IR-sändare och två kameror, användarna full rörelsekontroll över plattformen med en handviftning. För en djupgående översikt över Stewart-plattformen har vi inkluderat projektrapport och GitHub-länkar.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
Tekniken bakom Stewart-plattformar används i många andra moderna rörelsesimulatorer på grund av dess 6 frihetsgrader (tre för position, tre för riktning), vilket är det högsta antalet frihetsgrader en enda stel kropp kan ha. Ett exempel på detta i större skala kan ses i Cruden HexaPod-rörelsesimulator som använder sina sex frihetsgrader för att möjliggöra så exakta och repeterbara simuleringar som möjligt.

Flygsimulator med linjära ställdon

I takt med att tekniken fortsätter att utvecklas blir rörelsesimulatorer gradvis mer överkomliga för gör-det-själv-tillverkare över hela världen att uppleva. Ett anmärkningsvärt exempel på detta kan ses i Flygsimulatorprojekt av vår kund Anthony Escalante. Med sin modulära design av specialtillverkade komponenter, elektronisk hårdvara och programmering skapade Anthony en fullt fungerande flygrörelsesimulator för sitt hem.
Utformad med flera PA-03 och PA-04 Standardlinjära ställdon, Anthonys design har 6 frihetsgrader, liknande den tidigare nämnda Stewart-plattformen. Var och en av våra Standardlinjära ställdon hade tillräckliga hastighets- och kraftvärden för att smidigt hantera lutningar, rotationer och svängar för att simulera verklig flygning genom Anothonys rörelseplattform.

I sällskap med fyra strömförsörjning, styrsystemet har tillräcklig strömförbrukning för att integrera motordrivrutinerna och mikrokontrollerna som är prydligt packade i simulatorns styrhubb.
"Den går riktigt smidigt och är lätt att underhålla,"sa Anthony."Jag såg till att den var modulär för underhåll. Delar var lättillgängliga från järnaffärer och metalldelar köptes och kapades från Metal Mart. Ställdon och upphängning är lätta att byta ut. Inget huvudvärk med driftstopp. Min mormor kan till och med göra det själv."

Linjära ställdon för spår som den PA-18 och PA-08 är utmärkta alternativ för inomhusrörelsesimulatorer som kräver lösningar med kompakt längd vid utfällning och infällning. Detta beror på att spårlinjära ställdon har ett rörelseomfång som är inneslutet i ett spårs fördefinierade bana istället för en axel som skjuter ut i det fria.
Biplansimulator för barn

Rörelsesimulatorer används också för underhållningsändamål, t.ex. Biplansimulator för barn av EAA 485Det här projektet var en modernisering av den ursprungliga 3-axliga simulatorn som var känd från en systeravdelning i Wetumpka, Alabama. John McKiernan, ordförande för EAA 485, delar gärna med sig av sitt projekt till oss!
Biplansimulatorn behövde en slaglängd på 10 cm i roll- och pitchaxeln, och eftersom giraxeln var på en skivspelare kunde en förflyttning av den fästa punkten öka eller minska girrörelsen. Med tidigare erfarenhet av våra produkter kunde McKiernan fastställa PA-03 24 VDC, 200 lb ställdon med 4” slaglängd som lämplig modell.
"Det tog mindre än en dag att ställa in den och få giraxeln att fungera. Sedan köpte jag ytterligare 3 identiska ställdon för att ha ett reservdon. För att få roll- och pitch-funktionen att fungera var det nödvändigt att bearbeta fyra aluminiumblock för att kunna installera ett Heim-lager. Heims leder var nödvändiga för att ta emot lite axiell rörelse i roll- och pitch-aktiveringen. Dessa gjordes för hand och verkade fungera bra. En ny säkringspanel tillverkades senare med vanliga spadsäkringar, en för varje ställdon, Hobbs-mätare och cockpit. Cockpiten har riktiga flygplansmätare och ett mycket smart radiellt motorljud som styrs via en gasreglage. Den använder radiostyrda servotestare anslutna till en modul och en liten centerhögtalare bakom instrumentpanelen. Den hade till och med ett realistiskt kulspruteljud när en knapp trycktes ner.”, förklarar McKiernan.
McKiernan förklarar vidare, ”De ursprungliga strömbrytarna använde en fjäderrulle som, när spaken eller pedalerna var i neutralläge, befann sig i ett fenolblock. Genom att röra spaken eller roderpedalerna flyttades den till en aluminiumplatta för strömbrytaren. Jag gillade inte att spaken skulle stå för den elektriska banan, även om fenolblock isolerade området under sätet. Dessa var fästa på en inverterad aluminiumplatta och anpassade över den befintliga, nedre ursprungliga strömbrytarstrukturen."
Kulan vilar i omkopplarens mittläge i neutralläge och med en spak- eller pedalrörelse flyttas rullen och omkopplaren trycks ner. Det ursprungligen runda rullsystemet krävde lite mer justering eftersom själva blocket var tvunget att skäras upp för att anpassa omkopplaren till basen. Trots några utmaningar flög biplansimulatorn 36 barn på sin första utflykt på KJKA AOPA och Mckiernan var mycket nöjd med resultatet.
Projekt som dessa, som använder brytare som kontroller, är enklare att integrera för nybörjare utan att programmering krävs. Mikroaktuatorer erbjuder en kompakt storlek som är perfekt för att tillverka prototyper eller miniatyrreplikor av liknande rörelsesimulatorer. Att ha ett koncepttest för att demonstrera i presentationer kan hjälpa till att avslöja vissa hinder som projektet kan stöta på innan man tar sig an den fullstora rörelsesimulatorn.
I SAMMANFATTNING
Rörelsesimulatorer finns i en mängd olika former och storlekar vilket gör dem lämpliga för att simulera olika applikationsspecifika scenarier. Enheter som mikrokontroller, brytare och motordrivare integreras vanligtvis med linjära ställdon för att låta rörelsesimulatorer återskapa rörelse så exakt som möjligt.
Vi hoppas att du tyckte att detta var lika informativt och intressant som vi gjorde, särskilt om du var intresserad av hur rörelsesimulatorer och linjära ställdon fungerar tillsammans! Om du har några frågor eller vill diskutera våra produkter ytterligare, tveka inte att kontakta oss! Vi är experter på det vi gör och hjälper dig gärna på alla sätt vi kan.
sales@progressiveautomations.com | 1-800-676-6123