Çoklu aktüatör kontrolünün iki yöntemi vardır: paralel ve senkron. Paralel kontrol her aktüatöre sabit bir voltaj verirken, senkron kontrol her aktüatöre değişken bir voltaj verir.
Birden fazla işlemin senkronize edilmesi süreci aktüatörler İki veya daha fazla aktüatörün aynı hızda hareket etmesini sağlamak için konum geri beslemesi gereklidir. Bu, iki tür konum geri beslemesiyle elde edilebilir: Hall etkisi sensörleri ve çok turlu potansiyometreler.
Aktüatör üretimindeki küçük farklılıklar, aktüatör hızında da küçük farklılıklara yol açar. Bu durum, iki aktüatör hızını eşleştirmek için aktüatöre değişken bir voltaj verilerek düzeltilebilir. Her bir aktüatöre ne kadar voltaj verilmesi gerektiğini belirlemek için konum geri beslemesi gereklidir.
Aktüatörlerin senkronizasyonu Hassas kontrolün gerekli olduğu iki veya daha fazla aktüatörü kontrol ederken paralel kontrol önemlidir. Örneğin, birden fazla aktüatörün bir yükü hareket ettirmesi ve her aktüatör üzerinde eşit yük dağılımını koruması gereken uygulamalar. Bu tür bir uygulamada paralel kontrol kullanılırsa, değişken strok hızları nedeniyle eşit olmayan yük dağılımı meydana gelebilir ve sonuç olarak aktüatörlerden birine aşırı kuvvet uygulanabilir.
Hall Etkisi Sensörü
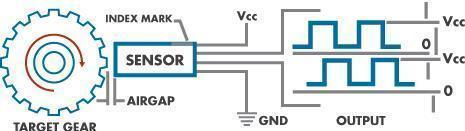
Hall Etkisi teorisini özetlemek gerekirse, Hall Etkisini keşfeden Edwin Hall, bir iletkende elektrik akımının akışına dik yönde bir manyetik alan uygulandığında bir voltaj farkının oluştuğunu belirtmiştir. Bu voltaj, sensörün bir mıknatısa yakın olup olmadığını tespit etmek için kullanılabilir. Motor miline bir mıknatıs takılarak, sensörler milin kendilerine paralel olup olmadığını algılayabilir.
Küçük bir devre kartı kullanarak, bu bilgi kare dalga şeklinde çıkışa verilebilir ve bu da bir dizi darbe olarak sayılabilir. Bu darbeleri sayarak motorun kaç kez döndüğünü ve nasıl hareket ettiğini takip edebilirsiniz.

Bazı Hall etkisi devre kartlarında birden fazla sensör bulunur. Genellikle 90 derece açıyla yerleştirilmiş 2 sensör bulunur ve bu da dörtlü bir çıkışa neden olur. Bu darbeleri sayarak ve hangisinin önce geldiğini görerek motorun dönüş yönünü belirleyebilirsiniz. Ya da daha hassas kontrol için her iki sensörü de izleyip daha fazla sayım elde edebilirsiniz.
Hall etkisi sensörü geri bildirimi yoluyla senkronizasyon, Progressive Automations ile sağlanabilir. PA-40 Senkronize Çift Hall Etkili Aktüatör Kontrolü kutu.
Potansiyometre Senkronizasyonu
Çok turlu potansiyometreler, reostat veya değişken dirençler olarak da bilinir ve bir aktüatörün konumunun analog bir temsilini sağlar. Sensör, potansiyometreyi döndüren ve dolayısıyla direnç değerini aktüatörün yaptığı hareket miktarına orantılı olarak ayarlayan motora bağlı bir dişli sistemine sabitlenmiştir. Toplam direnç/voltaj değişimi ölçülerek, aktüatörün toplam strok mesafesini temsil eden analog değerin tam ölçekli bir aralığı elde edilebilir. Progressive Automations aktüatörlerinde kullanılan potansiyometreler 10 kΩ'dur.
Senkronizasyon amacıyla, her bir potansiyometrenin analog değeri okunur ve bir program/kontrol kutusu bu değeri kullanarak her bir aktüatöre gerekli voltaj çıkışını belirleyebilir. Potansiyometre senkronizasyonu şu şekilde sağlanabilir: mikrodenetleyici programlama.
Senkronizasyonun Önemi
Bu noktada senkronizasyon yöntemleri açıklanmıştır. Şimdi senkronizasyonun neden önemli olduğuna bakalım. Birden fazla aktüatörün bir yükü itmek veya çekmek için kullanılması gerektiğinde, aktüatörlerin hızlarının tam olarak eşleşmesini sağlamamız gerekir. Aktüatör hızındaki bu hassasiyet, yükün eşit dağılımını sağlamak için gereklidir.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two PA-04 IP-66 Doğrusal Aktüatör with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Son Kontrol Elemanları
Aktüatörlerin senkronize edilmesinin önemi, birden fazla aktüatörün düzgün hareketini sağlamak ve aktüatör arızasını önlemekten kaynaklanmaktadır.
Hall Etkisi Kontrol Kutusu
Aktüatörler HALL Etkisi sensörleriyle özelleştirildiğinde, PA-40 kontrol kutusu Hall etkisi senkronizasyonu amacıyla kullanılabilir.
Arduino Mikrodenetleyici
Aktüatör kontrolünün uygulanması Arduino programlaması yoluyla gerçekleştirilebilir. Daha fazla bilgi için lütfen aşağıdaki bağlantıları ziyaret edin:
Başka sorularınız varsa, mühendislik ekibiyle iletişime geçmekten çekinmeyin. Destek Anında cevap alabilirsiniz.