




Ten/Ta/To PA-18 Track Linear Actuator je naše největší pevná délka pohon a běžně se používá v zakázkové výrobě skříní, domácí automatizaci a robotice. Pohon můžete snadno ovládat pomocí Deska Arduinoa tento článek ukáže, jak sestavit a naprogramovat zařízení řízené Arduinem lineární aktuátor které lze snadno přizpůsobit vaší aplikaci!
Požadovaný hardware
Pro lineární aktuátor řízený Arduinem je potřeba následující hardware, který lze zakoupit od společnosti Progressive Automations:
- 1x Lineární aktuátor PA-18
- 1x Arduino Uno
- 1x MegaMoto Plus H-můstek
- 1x Napájení 12 V stejnosměrného proudu
- 2x tlačítko s okamžitým stisknutím
- Startovací kabely
Zapojení systému
Pohon použitý v tomto uspořádání vyžaduje vstupní napětí 12 VDC a proud až 8 A při plném zatížení. Tyto hodnoty jsou mnohem vyšší, než jaké je schopen dodat mikrokontrolér Arduina, a způsobí, že z Arduina bude vycházet „magický“ kouř. Aby se zabránilo poškození Arduina, používá se H-můstek MegaMoto Plus. H-můstek zvládne požadavky na napájení a lze jej snadno použít k ovládání pohonu s Arduinem.
Tento systém využívá připojení z Arduina k H-můstku MegaMoto Plus a ke dvěma tlačítkům. Každé tlačítko vyžaduje jeden vstup, který je vybrán z dostupných GPIO pinů Arduina. H-můstek má čtyři připojení k Arduinu, tři výstupy a jeden vstup. Piny používané H-můstkem jsou přednastavené a nelze je změnit.
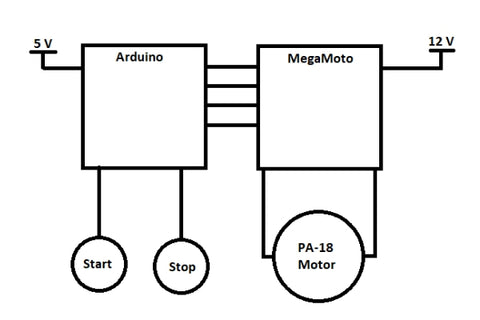
Blokové schéma
Níže uvedené blokové schéma stručně vysvětluje požadavky na napájení a zapojení. Arduino běží na 5V napájení a H-Bridge na 12V. Pokud používáte dva samostatné napájecí zdroje, je důležité, aby jejich uzemnění bylo sdílené, aby se zabránilo scénáři s plovoucí zemnící jednotkou.
Příkazy pro Arduino
Budete muset nainstalovat Arduino IDE na stolní počítač nebo notebook. Mějte na paměti, že zapojení vašeho systému ovlivní váš kód pro Arduino. Proto je důležité zkontrolovat zapojení a porovnat je s kódem, který jste zadali.
Příkaz pinMode Arduina se používá k definování pinů jako vstupů nebo výstupů. Pro změnu signálu, který Arduino odesílá na konkrétní pin, se používají příkazy digitalWrite a analogWrite. Příkazy digitalRead a analogRead se navíc používají, když Arduino potřebuje zkontrolovat signál na konkrétním pinu.
V níže uvedeném programu se příkaz digitalWrite používá k povolení nebo zakázání H-můstku a ke konfiguraci pinů používaných pro tlačítka. Příkaz analogWrite se používá k nastavení hodnoty PWM signálu v rozsahu 0 až 255 pro H-můstek. Příkaz digitalRead se používá ke kontrole, zda byla tlačítka stisknuta nebo uvolněna. Příkaz analogRead se používá k měření odběru proudu motorem aktuátoru, což ověří, kdy je aktuátor na konci svého zdvihu.
Kód Arduina
Následující část se zabývá definicemi programu, nastavením, hlavní smyčkou a funkcemi tlačítek pro lineární aktuátor ovládaný Arduinem. Je důležité procházet kód řádek po řádku, abyste pochopili, jak funguje. Toto pochopení vám umožní provádět úpravy na základě vaší aplikace.
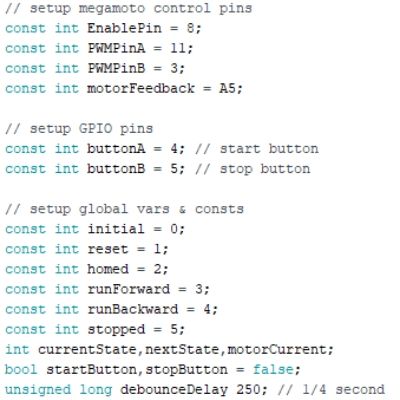
Definice programu
Tato část kódu je nastavení zapojení pinů. Zkontrolujte, zda vaše připojení k desce Arduino odpovídají zadaným číslům. Tyto hodnoty lze změnit v závislosti na tom, zda k Arduinu připojujete další komponenty, které pak mohou vyžadovat posunutí zapojení pinů.
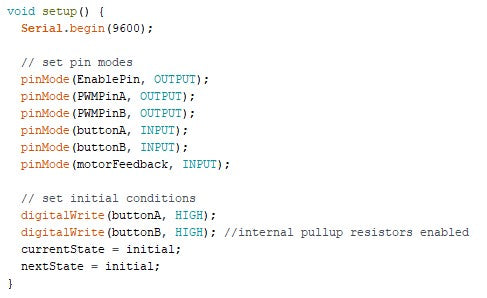
Nastavení programu
Tato část kódu konfiguruje připojené piny jako vstup nebo výstup. Dvě tlačítka lze nastavit na HIGH nebo LOW v závislosti na tom, jak jste je zapojili (pull-up nebo pull-down). Ačkoli má Arduino interní pull-up rezistory, můžete chtít přidat externí rezistor pro potlačení odskoků spínačů a zabránění falešnému sepnutí.
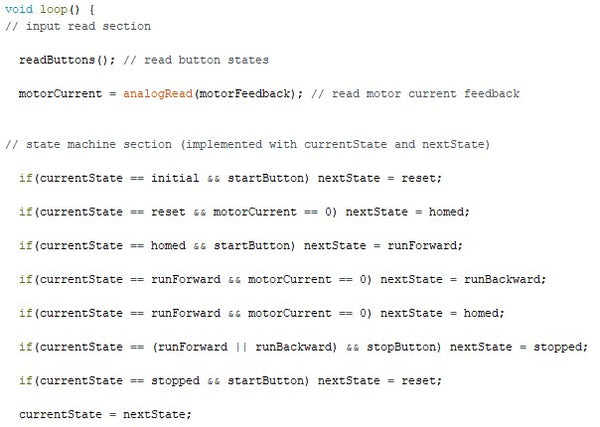
Hlavní smyčka
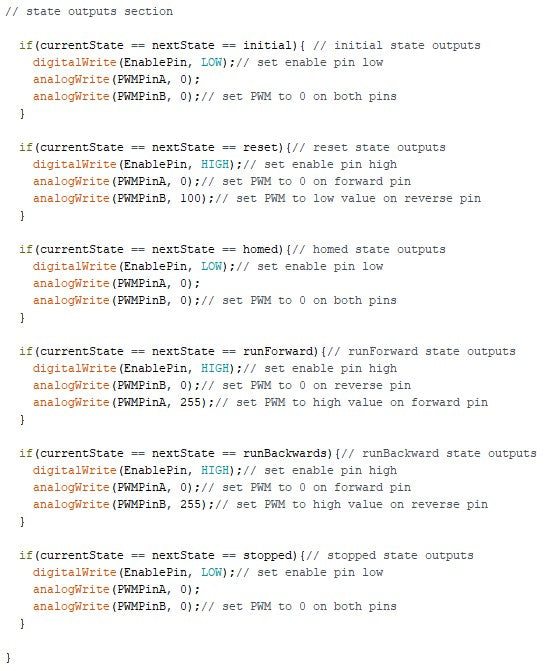
Hlavní smyčka neustále kontroluje, zda byla stisknuta tlačítka, a v závislosti na výsledku funkce tlačítka spouští konkrétní část kódu. Součástí je i sekce stavového automatu, která určuje, co lineární aktuátor ovládaný Arduinem dělá a jak by měl reagovat na základě vstupů (tj. tlačítek).
Funkce tlačítek
Tyto funkce digitálně čtou stav tlačítek pro ovládání aktuátoru pomocí Arduina. Každá funkce tlačítka má v hlavním příkazu if smyčku proti odpalování, která zabraňuje chybnému zapnutí a odeslání nesprávného signálu do Arduina. Výstupem těchto funkcí je booleovská hodnota. Například pokud je stisknuto tlačítko Start, hodnota startButton se změní na true. Booleovská hodnota se poté použije v hlavní smyčce k dalšímu rozhodování.

Závěrečná slova
Funkčnost tohoto systému jde nad rámec toho, co je prezentováno v tomto článku. Mikrokontrolér Arduino A H-můstek MegaMoto Plus lze použít k implementaci mnohem složitějších řídicích rutin. Toto nastavení je schopno regulovat proměnnou rychlost pomocí příkazu analogWrite k nastavení PWM signálu. Proud motoru pohonu lze monitorovat a používat k snímání zátěže, které spustí další příkazy.
Navíc lze připojit další senzory pro pokročilý lineární aktuátor řízený Arduinem. Například lze připojit ultrazvukový senzor pro spuštění/zastavení motoru, když jste v určité vzdálenosti, nebo jej lze použít ke spuštění řady dalších zajímavých funkcí. Možnosti jsou nekonečné. Pokud však na Arduinu docházejí piny, můžete zvolit jiný model Arduina. Alternativně lze více Arduinů propojit dohromady, aby spolu komunikovaly navzájem a s různými komponentami. Tato cesta však bude vyžadovat slušné množství programátorských zkušeností.
Pro další informace nám prosím zašlete e-mail na adresu sales@progressiveautomations.comnebo nám zavolejte na číslo 1-800-676-6123.