
- Introducción a cómo funcionan los actuadores
- Mecanismos de retroalimentación de posición
- Tipos de sistemas de control para actuadores
- Retroalimentación y corrección de errores
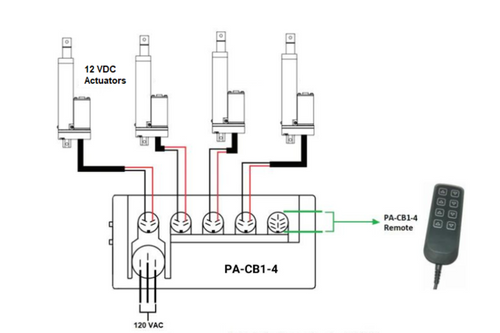
- Cajas de control para actuadores lineales
Introducción a cómo funcionan los actuadores
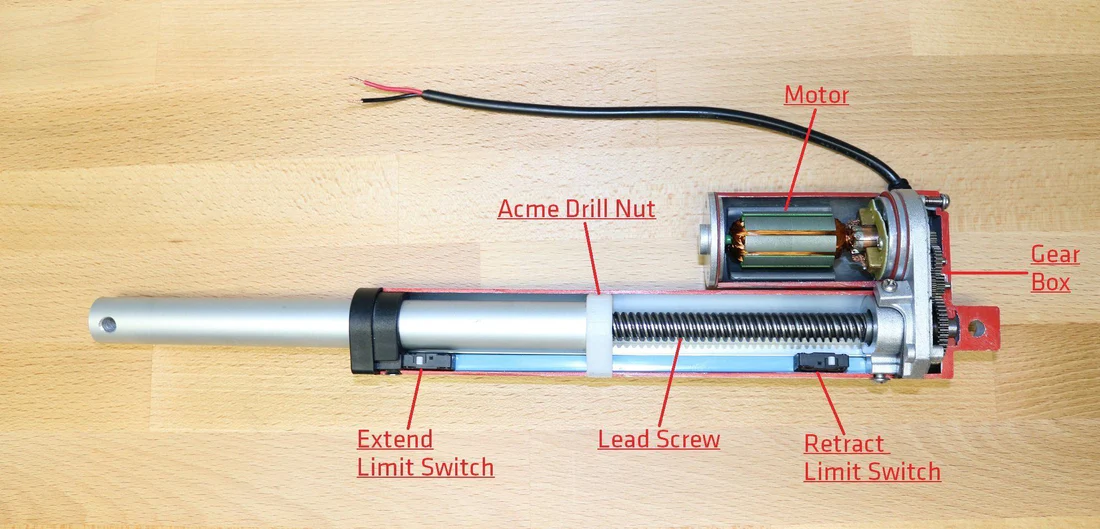
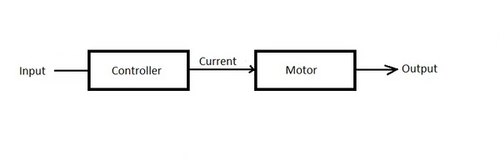
En los actuadores lineales eléctricos, se utiliza corriente eléctrica para producir movimiento rotacional en un motor eléctrico
que está vinculado mecánicamente a una caja de engranajes y utiliza un tornillo de avance para ciclar el eje del actuador, el cual está unido a una tuerca ACME para lograr movimiento lineal. Los sistemas de control para actuadores se han desarrollado significativamente a lo largo de los años, mejorando la versatilidad y la funcionalidad de estos dispositivos. Los actuadores lineales pueden operarse mediante diversos medios y mecanismos de control, entre ellos:
• Controladores inalámbricos: ofrecen a los usuarios la comodidad de la operación a distancia sin necesidad de cables físicos.
• Controladores con Wi‑Fi y Bluetooth: permiten la integración en sistemas inteligentes y el acceso mediante dispositivos móviles, proporcionando interfaces fáciles de usar y la posibilidad de ajustar la configuración de forma remota y precisa.
Estos avances en la tecnología de actuadores y en los sistemas de control han ampliado el alcance de sus aplicaciones, haciéndolos indispensables en los sistemas automatizados modernos. Ya sea para ajustar ventanas en vehículos, operar equipos agrícolas de uso intensivo, o automatizar electrodomésticos, los actuadores siguen siendo fundamentales para traducir señales eléctricas en acción física.

Comprender los sistemas de control para actuadores
El objetivo principal de estos sistemas es garantizar que los actuadores funcionen con precisión, eficiencia y fiabilidad según parámetros predefinidos. La importancia de los sistemas de control en el funcionamiento de los actuadores es fundamental, especialmente para lograr un control de movimiento preciso y eficiente. Estos sistemas son cruciales por varias razones:
1. Precisión: Los sistemas de control permiten ajustar con precisión los movimientos de los actuadores para lograr altos niveles de repetibilidad y precisión. Esto es esencial en aplicaciones donde el posicionamiento exacto es crucial, como en la cirugía robótica o la ingeniería aeroespacial.
2. Eficiencia: Al optimizar la respuesta de los actuadores a las órdenes, los sistemas de control reducen el consumo de energía y minimizan el desgaste. Esto no solo prolonga la vida útil del actuador, sino que también mejora la eficiencia general del sistema en el que opera.
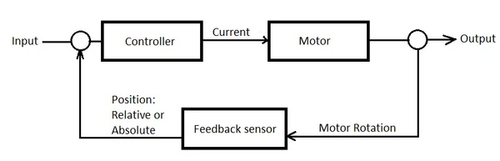
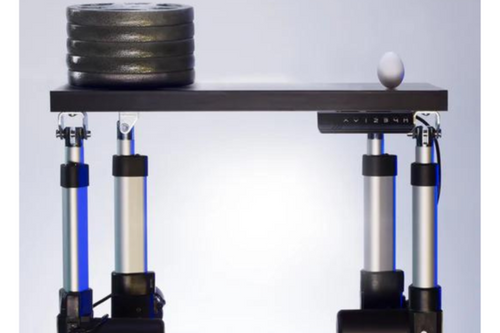
3. Adaptabilidad: Los mecanismos de retroalimentación pueden ajustar el comportamiento de los actuadores compatibles en tiempo real mediante el análisis de su retroalimentación posicional. Esta adaptabilidad es vital en entornos dinámicos donde las condiciones cambian rápidamente, como en procesos de fabricación automatizados o cuando varios actuadores experimentan una distribución desigual del peso.
5. Funciones de seguridad: Las funciones de seguridad programadas, como la protección contra sobrecargas, ayudan a prevenir daños en un actuador o la aplicación al detener su funcionamiento cuando la caja de control detecta un consumo de corriente eléctrica excesivamente alto. Otra característica de seguridad presente en las cajas de control incluye la protección contra sobrecalentamiento, que detiene el funcionamiento tras un cierto tiempo de ciclo y garantiza que se mantenga dentro de los valores nominales del ciclo de trabajo del actuador, evitando así la rotura del motor. Los sistemas de control son fundamentales para el funcionamiento de los actuadores, ya que proporcionan la inteligencia y la adaptabilidad necesarias para garantizar la precisión, la eficiencia, la seguridad y un control de movimiento eficaz. Su papel es crucial en el creciente campo de la tecnología de automatización, donde la precisión del movimiento suele ser la piedra angular del éxito operativo.
Componentes y tipos de sistemas de control
Componentes Clave de una Caja de Control Básica
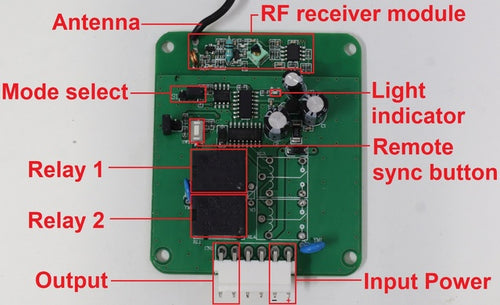
En una caja de control básica diseñada para actuadores lineales eléctricos, cada componente desempeña un papel crucial para garantizar un funcionamiento eficiente. A continuación, se detallan estos componentes principales, sus funciones y sus propósitos:1. Relés: Los Relés actúan como interruptores que controlan el circuito eléctrico de alta potencia mediante una señal de baja potencia. Para las cajas de control diseñadas para gestionar actuadores de dos cables, dos relés son esenciales para invertir la polaridad del voltaje aplicado a los dos cables del actuador, lo que a su vez cambia la dirección del movimiento. Esto permite un control bidireccional en una configuración sencilla para extender y retraer el actuador.
2. Canales de entrada: Los canales de entrada son interfaces a través de las cuales el sistema de control recibe señales eléctricas de fuentes externas, como fuentes de alimentación o señales de controles remotos con cable. Las cajas de control que funcionan con retroalimentación de posición también pueden recibir señales de los sensores de un actuador. Estos canales procesan las señales del usuario o de los sensores para determinar cómo debe funcionar el actuador, lo que los hace fundamentales para iniciar y controlar los movimientos del actuador según los requisitos específicos.
3. Canales de salida: Los canales de salida envían señales de control desde el controlador al actuador u otros componentes, como relés. Las cajas de control que funcionan con retroalimentación de posición también pueden emitir corriente eléctrica para que los sensores de un actuador tengan la energía necesaria para funcionar. Estos canales son cruciales para ejecutar los comandos determinados por el sistema de control, lo que influye directamente en el comportamiento del actuador.
4. Botón de sincronización remota: Este botón se utiliza para sincronizar el sistema de control con un dispositivo de control remoto. Garantiza que el sistema de control reconozca y procese las entradas remotas, lo que facilita una operación cómoda y flexible a distancia.
5. Indicador luminoso: Los indicadores luminosos proporcionan información visual sobre el estado del sistema. Pueden indicar encendido/apagado, modos de operación, estados de error o recepción de señal, lo que facilita la supervisión y la resolución de problemas del sistema sin necesidad de herramientas de diagnóstico complejas.
6. Selección de modo: Esta función permite al usuario cambiar entre diferentes modos de funcionamiento de la caja de control, como controles momentáneos o no momentáneos. En el modo momentáneo, el botón de un control remoto debe mantenerse pulsado continuamente para que el dispositivo funcione. Al soltar el interruptor, el dispositivo deja de funcionar. El modo no momentáneo funciona como un interruptor que permanece en su última posición hasta que se cambia de nuevo, independientemente de si se presiona. Esto significa que, una vez activado, el dispositivo continúa funcionando hasta que se apaga manualmente.
7. Antena: La antena forma parte de las cajas de control con una configuración de comunicación inalámbrica. Se utilizan para mejorar el alcance y la calidad de la señal entre el sistema de control y los dispositivos de control remoto, o entre sistemas interconectados. Es crucial para mantener una comunicación robusta en entornos donde el cableado directo es poco práctico o no es deseable.
8. Módulo receptor de RF: Este módulo recibe señales de radiofrecuencia enviadas por controles remotos inalámbricos. Decodifica estas señales en comandos procesables que el sistema de control puede comprender y ejecutar. El módulo receptor de RF es esencial para las configuraciones de control inalámbrico, ya que permite la operación remota del actuador sin contacto físico. Juntos, estos componentes forman un sistema de control integral para actuadores de dos hilos, cada uno con una función específica que contribuye a la eficacia y eficiencia general del funcionamiento del actuador. Este sistema no solo permite un control preciso de los movimientos del actuador, sino que también mejora la interfaz y la interacción del usuario, adaptándolo a una amplia gama de aplicaciones.
Mecanismos de retroalimentación de posición
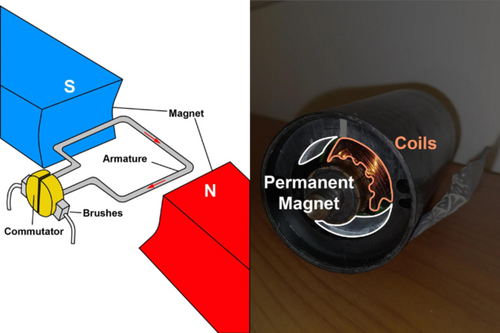
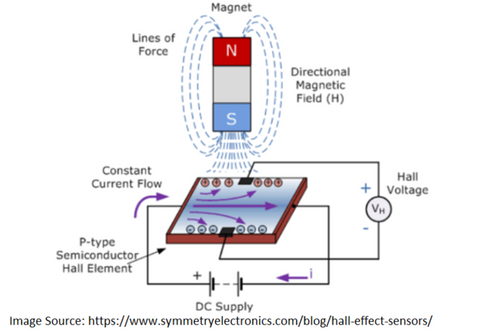
Sensores de efecto Hall
La teoría del efecto Hall, de Edwin Hall (quien descubrió el efecto Hall), establece que siempre que se aplica un campo magnético en una dirección perpendicular al flujo de corriente eléctrica en un conductor, se induce una diferencia de voltaje. Este voltaje puede utilizarse para detectar si un sensor de efecto Hall está en proximidad de un imán.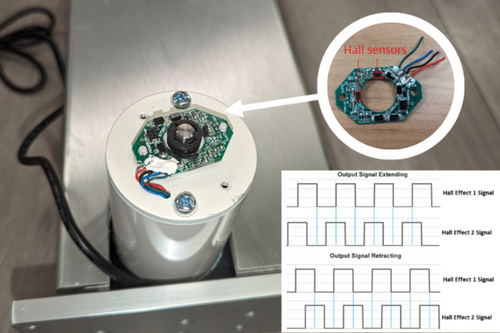
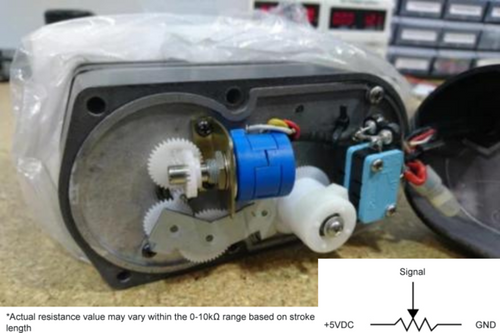
Potenciómetros
Un potenciómetro proporciona una resistencia variable que es proporcional a la posición del actuador. A menudo hay engranajes vinculados entre la perilla del potenciómetro y el motor giratorio del actuador. A medida que el actuador se mueve, el valor de la resistencia cambia, lo que puede medirse y convertirse en datos de posición. Esta información luego la utiliza un sistema de control para realizar ajustes finos en la posición del actuador, mejorando la precisión.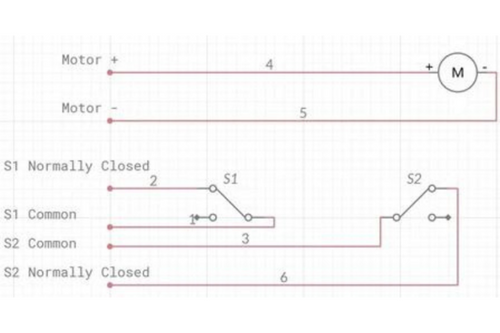
Retroalimentación de finales de carrera
El propósito de las señales de retroalimentación de finales de carrera es permitir que un sistema determine si el actuador ha accionado físicamente los finales de carrera internos. Este tipo de retroalimentación es simple y útil para aplicaciones que principalmente solo requieren información sobre si el actuador ha alcanzado las posiciones totalmente extendida o totalmente retraída.Tipos de sistemas de control para actuadores
Un ejemplo de un sistema de lazo abierto simple incluye un interruptor basculante momentáneo cableado a un actuador lineal. Esto requiere que un operador presione y mantenga físicamente el interruptor para que el actuador continúe ciclando; soltar el interruptor antes de que el actuador haya alcanzado el fin del recorrido hará que el actuador detenga el movimiento a mitad de camino.
La elección del sistema de control y sus componentes impacta significativamente en la funcionalidad y la optimización del rendimiento de los actuadores. Al integrar mecanismos de retroalimentación efectivos y seleccionar el tipo de sistema de control adecuado, los actuadores pueden optimizarse para una amplia gama de aplicaciones, garantizando tanto la precisión como la fiabilidad en su operación.
Retroalimentación y corrección de errores
Variables que corrigen los sistemas de control
1. Posición: Los sistemas de control ayudan a garantizar que un actuador alcance y mantenga con precisión la posición deseada comparando la posición seleccionada por el usuario con la lectura real de posición de los sensores de retroalimentación. Ejemplos de ello incluyen cuando los usuarios de escritorios de pie presionan un botón del controlador para que los actuadores se desplacen a una posición de memoria preestablecida específica y así ajustar su espacio de trabajo de la altura sentada a la altura de pie.
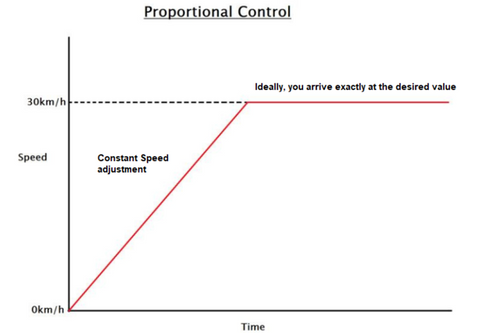
2. Velocidad: Leer la retroalimentación de posición y dividir la distancia recorrida por el tiempo transcurrido dará como resultado la velocidad de recorrido. Algunos sistemas de control permiten ajustar la velocidad mediante PWM (modulación por ancho de pulso), lo que habilita que el actuador se mueva a diferentes velocidades según los requisitos de la aplicación. Esto es útil en aplicaciones donde se necesitan velocidades variables, como en actuadores que impulsan el movimiento de simuladores de vuelo.
3. Fuerza: Ciertos sistemas de control pueden regular la cantidad de fuerza ejercida por los actuadores, asegurando que operen dentro de límites seguros y evitando daños al sistema o a los componentes circundantes. Midiendo el consumo de corriente eléctrica, los sistemas de control pueden estimar aproximadamente cuánta fuerza están ejerciendo los actuadores lineales. Esta función es útil para actuadores lineales que abren y cierran ventanas, permitiendo cortar la alimentación y dejar de aplicar fuerza en caso de que la mano de una persona u otro obstáculo esté bloqueando el camino del recorrido.
Tipos de estrategias de control
Elegir el sistema de control adecuado
• Grado de protección IP
• Compatibilidad
• Presupuesto
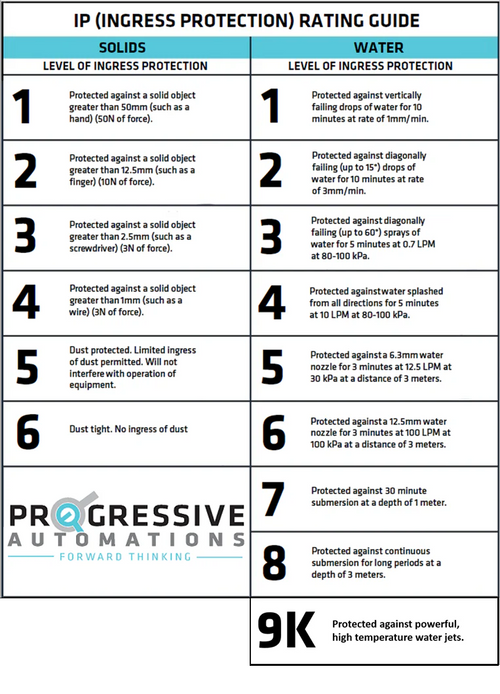
1. Grado de protección IP: Evalúa los requisitos ambientales específicos de tu aplicación para determinar el tipo de sistemas de control necesarios. La caja de control PA-33, por ejemplo, tiene un grado de protección IP65 para resistencia al polvo y al agua. Se recomienda un grado de protección IP65 o superior para sistemas de control expuestos a elementos exteriores como lluvia, polvo y residuos. 2. Compatibilidad: Asegúrate de que el sistema de control sea compatible con los actuadores lineales eléctricos que has elegido o estás utilizando actualmente para garantizar una integración sin problemas. Verifica si tu actuador tiene los protocolos de comunicación/retroalimentación de posición que coinciden con los controladores que estás considerando. Por ejemplo, los Micro Precision Servo Actuator PA-12-T (TTL/PWM) y PA-12-R (RS-485) proporcionan un control de posición preciso con una exactitud de posición de hasta 100 um y requieren protocolos de comunicación avanzados para tal rendimiento. Otra cosa a considerar es si el tipo de motor de tu actuador será compatible con un sistema de control. Los motores sin escobillas de funcionamiento continuo, como los que se encuentran en nuestros actuadores PA-14 por pedido, requerirían cajas de control compatibles con su operación, como la caja de control LC-241. Para ver cuáles de nuestras cajas de control y actuadores son compatibles entre sí, consulta nuestras tablas de comparación y compatibilidad de cajas de control a continuación: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Presupuesto: Considera si hay restricciones de presupuesto para el proyecto y elige un sistema de control que ofrezca el mejor valor para tu inversión cumpliendo a la vez con tus requisitos de rendimiento. Por ejemplo, proyectos sencillos en interiores que no requieren alta precisión funcionarían sin problemas cableando un interruptor basculante básico sin alto grado de protección IP para controlar un mini actuador lineal de 2 cables a un precio asequible.

Cajas de control tipo efecto Hall
Lee nuestro blog sobre aplicaciones de las cajas de control FLTCON para más información.
