
Raskaiden koneiden, kuten halkomakoneiden, käsittely voi olla varsin haastavaa ja fyysisesti kuormittavaa – etenkin, jos niitä on käytettävä usein. Sähköisiä lineaarisia toimilaitteita hyödyntämällä käyttäjät voivat toteuttaa päivityksiä, jotka tuovat rajattomasti mahdollisuuksia ja käyttömukavuutta. Tässä artikkelissa kerromme, kuinka Ron Ewart päivitti halkomakoneensa PA-17-raskaskäyttöisellä lineaarisella toimilaitteellamme, jotta laite vaihtaa automaattisesti vaaka- ja pystyasentojen välillä.
Toimilaitteen valinta laskenta-arvioita varten

Ronn halkomakoneen palkin nostamiseen ja laskemiseen tarvitaan toimilaite lineaarisen liikkeen tuottamiseen. Kestävä rakenne sekä pöly- ja vesitiiviys olivat vaatimuksia, jotta ulkokäytössä huomioidaan roskat ja sade. PA-17-raskaskäyttöinen lineaarinen toimilaite tarjosi Ronille sopivan IP-luokituksen IP65 pölyn- ja roiskevedenkestoon. Karkeiden olosuhteiden sopivuuden lisäksi raskaskäyttöiset sähköiset lineaariset toimilaitteemme ovat saatavana valmiina varastosta korkealla voimaluokituksella 850 lbs, ja ne säilyttävät kunnioitettavan nopeuden 0.55"/sec täydellä kuormalla.
Parametrien testaus Excel-taulukolla

Tässä projektissa Ron käyttää Menardsin Brute® 30-Ton 250cc Full Beam Gas Log Splitter -mallia, mallinumero: YTL-140-701. Ron jakoi mielellään Excel-taulukkonsa lukijoillemme lähtökohdaksi voiman ja kiinnityskohtien laskemiseen vastaavia projekteja varten. Taulukossa käyttäjä syöttää toimilaitteen voiman sekä lyhimmän ja pisimmän pituuden sinisiin soluihin. Tämän jälkeen omia kokoonpanoja voi kokeilla keltaisissa soluissa. Punaiset varoitussolut ilmestyvät, jos toimilaitteen minimi- tai maksimipituus ylittyy.
Katso liitetystä taulukosta deratoidut (alennetut) toimilaitteen voimat. Taulukkoa voi käyttää:
- Toimilaitteen alennetun voiman maksimoimiseen.
- Etsimään koordinaatit toimilaitteen molemmille päille siten, etteivät halkomakoneen rakenteet estä liikettä.
- Liikkeen optimointiin niin, että se pysyy toimilaitteen 24” iskun pituuden sisällä.
Valitut toimilaitteen päätynivelen sijainnit näkyvät RIVILLÄ 18.
- Koordinaatit (x1, y1) ovat toimilaitteen alempi päätepiste tuumina suhteessa palkin kääntöakseliin.
- Koordinaatit (x2, y2) ovat toimilaitteen ylempi päätepiste tuumina suhteessa palkin kääntöakseliin.
- Delta d (pitkä–lyhyt) on käytetty kokonaisliike; 22,6” lopullisessa sijainnissa.
- Alennettu pystysuuntainen avausvoima ja vaakasuuntainen sulkuvoima näkyvät sarakkeissa O ja P.
Voiman ja kiinnityskohtien laskeminen

Halkomakoneen muuttaminen vaaka-asennosta pystyyn vaatii 70 lbs pystysuuntaista voimaa käyttäjän kahvasta palkin nostamiseksi; kahva on 42” vaakasuunnassa kääntöakselista. Koska toimilaitteen nostopiste sijaitsee paljon lähempänä palkin kääntöakselia, toimilaitteelta tarvitaan noin 196 lbs pystysuuntaista voimaa asennettuna paikoilleen.
Toimilaitteen soveltama pystysuuntainen voima = käyttäjän voima * (käyttäjän nostopiste / toimilaitteen nostopiste)
Toimilaitteen soveltama pystysuuntainen voima = 70 lbs * (42”/15”)
Toimilaitteen soveltama pystysuuntainen voima = 196 lbs
Ron hyödynsi Excel-taulukon kaavoja laskeakseen ja määrittääkseen valitut toimilaitteen lopulliset koordinaatit. Monia vaihtoehtoja testattiin ja luotiin; parhaat koordinaatit valittiin ja pidettiin, jotta taulukko pysyi selkeänä. Dynaamisen voiman 850 lbs luokitus antaa PA-17-24-850:lle runsaasti pelivaraa hyvää turvamarginaalia varten. Toimilaitteen alennettu pystysuuntainen voimakapasiteetti lopullisten koordinaattien perusteella on 699 lbs. Tämä vastaa noin 3,5-kertaista turvamarginaalia, kun huomioidaan, että sovellettu voima on noin 196 lbs.
Turvamarginaali = alennettu pystysuuntainen voimakapasiteetti / sovellettu pystysuuntainen voima
Turvamarginaali = 699 lbs / 196 lbs
Turvamarginaali = 3,57
Sähköinen syöttö ja suojaus
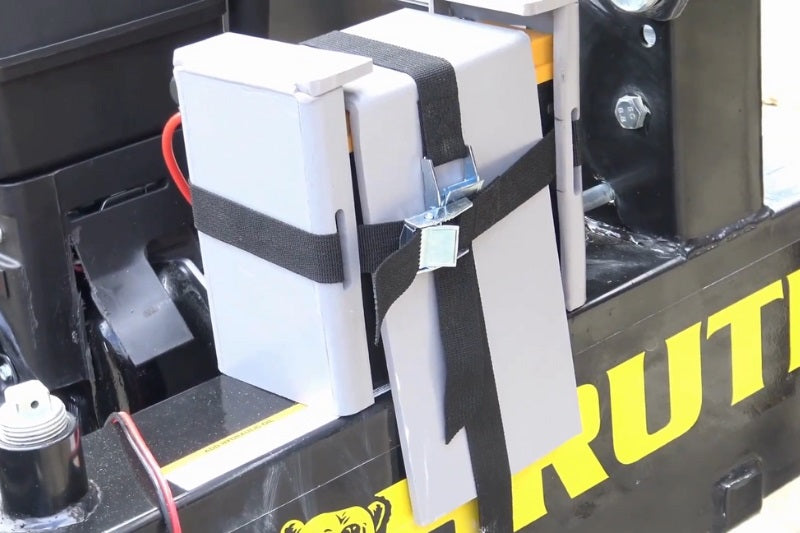
Sähköisenä virtalähteenä Ron käytti Weize YTX30L-BS -litium-moottoripyörän akkua, 12 V 12 Ah, 700 CCA, jossa on Battery Management System (BMS). Tässä projektissa akku suojattiin 30 A ATO-sulakkeella, mutta Ron ei suosittelisi sitä uudelleen tehtäessä. Sen sijaan hän suosittelee 20 A ATO -sulaketta, joka suojaa toimilaitetta paremmin ja on noin nelinkertainen toimilaitteen liikuttamiseen vaadittuun nähden.
Vipukytkinohjaukset
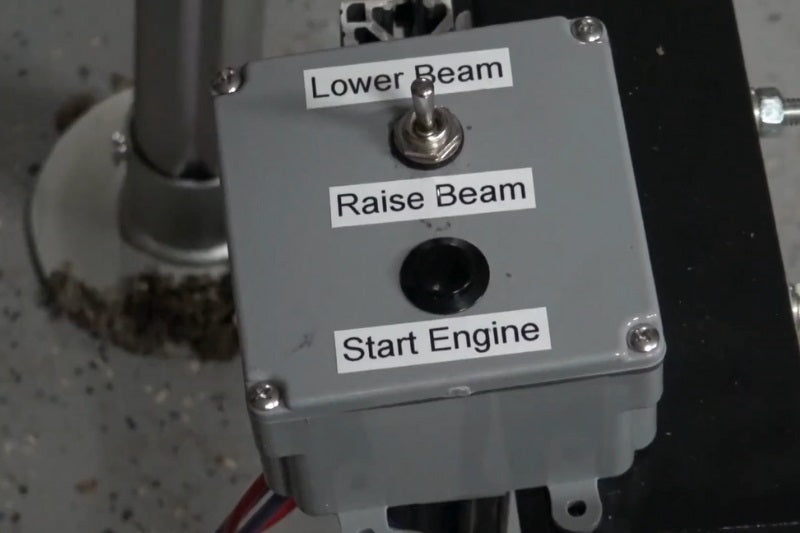
Toimilaitteen ohjaukseen käytettiin kolmiportaista hetkellistä DPDT-vipukytkintä, joka Ronilla sattui olemaan. Kun käyttäjän tulee fyysisesti pitää kytkintä ylä- tai alaasennossa, se ehkäisee joutumista puristuskohtaan ja mahdollistaa toimilaitteen välittömän pysäyttämisen häiriön ilmetessä. 20 A sulaketta käyttäville Ron suosittelee hetkellistä vipukytkintä, kuten TB2-2G-DC-1, joka on luokiteltu 20 A / 12 VDC ja saatavilla hyvään hintaan jakelijoilta, kuten Digikey.
Päivitetyn halkomakoneen käyttö

Käytön aikana Ron totesi toimilaitteensa tyypillisen virran olevan noin 3 A, ja käynnistyksessä se saattaa piikata hetkellisesti noin 5 A:iin. Palkin nosto kestää noin 36 sekuntia ja lasku noin 38 sekuntia. BRK-17-kiinnityskannattimia käytettiin PA-17-toimilaitteen etu- ja takakiinnitysreikien varmistamiseen siten, että 180 asteen käännöt ovat edelleen mahdollisia. Muu runko rakennettiin pääasiassa 80/20-profiileista, sarjoista 1010 ja 1515, yhdistettynä alumiinikulmiin ja -levyihin.
Katso video Ronin päivitetystä halkomakoneesta toiminnassa!
YHTEENVETO
Oikeilla tarvikkeilla ja ripauksella oivallusta Ronilla on nyt päivitetty halkomakone, joka lisää mukavuutta ja tehokkuutta vaihtamalla automaattisesti eri kokoonpanoihin ilman fyysistä ponnistelua.
Kiitos, Ron Ewart, projektisi jakamisesta! Toivomme, että halkomakoneen päivitykset palvelevat sinua jatkossakin erinomaisesti! Lisää Ronin projekteja löydät hänen sivustoltaan.
https://blueboxdriver.com/bluebox/
Jos sinulla on kysyttävää sähköisistä lineaarisista toimilaitteistamme tai haluat keskustella muista tuotteistamme, ota meihin rohkeasti yhteyttä! Olemme alamme asiantuntijoita ja autamme mielellämme.
sales@progressiveautomations.com | 1-800-676-6123