
De PA-18 Track Linear Actuator er vår største fastlengde aktuator og brukes ofte i spesialbygde skap, hjemmeautomasjon og robotikk. Du kan enkelt styre en aktuator med en Arduino-kort, og denne artikkelen vil vise hvordan man bygger og programmerer en Arduino-styrt lineær aktuator som enkelt kan tilpasses din applikasjon!
Nødvendig maskinvare
Følgende maskinvare er nødvendig for en Arduino-styrt lineær aktuator, som alle kan kjøpes fra Progressive Automations:
- 1x PA-18 spor lineær aktuator
- 1x Arduino Uno
- 1x MegaMoto Plus H-bro
- 1x 12 VDC strømforsyning
- 2x Momentane trykknapper
- Jumperledninger
Systemkabling
Aktuatoren som brukes i dette oppsettet krever en inngangsspenning på 12 VDC og opptil 8 A strøm ved full belastning. Disse verdiene er mye høyere enn det en Arduino-mikrokontroller er i stand til å levere, og vil føre til at det kommer «magisk» røyk ut av Arduinoen. For å unngå å skade Arduinoen brukes MegaMoto Plus H-broen. H-broen kan håndtere strømkravene og kan enkelt brukes til å styre en aktuator med en Arduino.
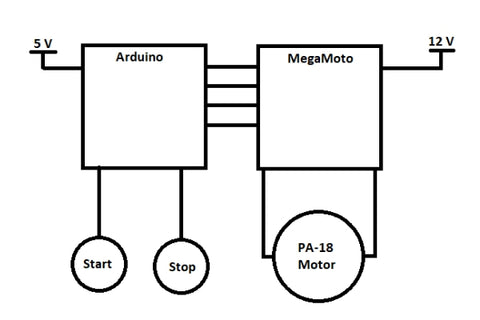
For dette systemet er det tilkoblinger fra Arduinoen til MegaMoto Plus H-broen, og til de to trykknappene. Hver trykknapp krever én inngang, som velges fra Arduinoens tilgjengelige GPIO-pinner. H-broen har fire tilkoblinger til Arduinoen, tre utganger og én inngang. Pinnene som brukes av H-broen er forhåndsinnstilt og kan ikke endres.
Blokkdiagram
Blokkdiagrammet nedenfor forklarer kort strømkravene og tilkoblingene. Arduinoen kjører på en 5V-forsyning og H-broen kjører på 12V. Hvis du bruker to separate strømforsyninger, er det viktig at jordingen deres deles for å unngå et flytende jord-scenario.
Arduino-kommandoer
Du må installere Arduino IDE på en stasjonær eller bærbar datamaskin. Husk at systemkablingen din vil påvirke Arduino-koden din. Derfor er det viktig å dobbeltsjekke tilkoblingene dine og sammenligne dem med koden du har skrevet inn.
Kommandoen pinMode Arduino brukes til å definere pinnene som innganger eller utganger. For å endre hvilket signal Arduinoen sender til en bestemt pin, brukes kommandoene digitalWrite og analogWrite. I tillegg brukes kommandoene digitalRead og analogRead når Arduinoen trenger å sjekke signalet på en bestemt pin.
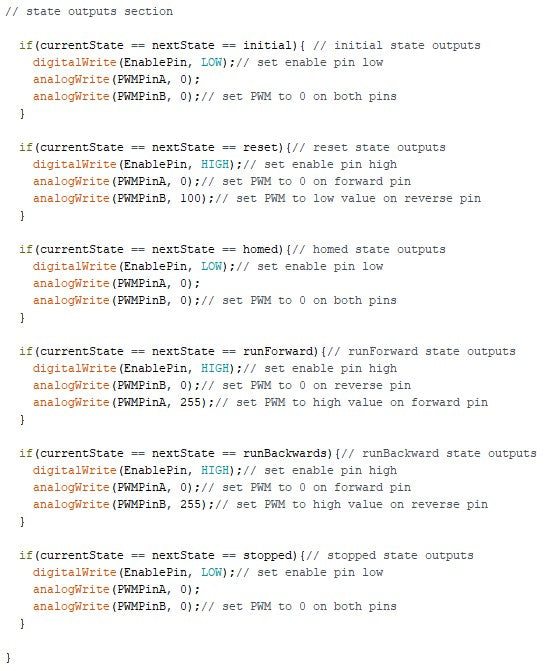
I programmet nedenfor brukes digitalWrite-kommandoen til å aktivere eller deaktivere H-broen, og til å konfigurere pinnene som brukes for trykknappene. analogWrite-kommandoen brukes til å angi verdien for PWM-signalet i området 0 til 255 til H-broen. digitalRead-kommandoen brukes til å sjekke om trykknappene har blitt trykket inn eller sluppet. analogRead-kommandoen brukes til å måle strømforbruket til aktuatormotoren, noe som vil bekrefte når aktuatoren er ved slutten av sitt slag.
Arduino-kode
Følgende avsnitt går gjennom programdefinisjoner, oppsett, hovedsløyfe og trykknappfunksjoner for en Arduino-styrt lineær aktuator. Det er viktig å gå gjennom koden én linje om gangen for å forstå hvordan den fungerer. Denne forståelsen vil tillate deg å gjøre justeringer basert på applikasjonen din.
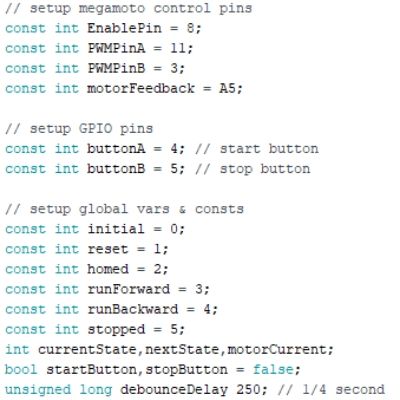
Programdefinisjoner
Denne delen av koden er oppsettet for pin-tilkoblingen. Dobbeltsjekk at tilkoblingene til Arduino-kortet samsvarer med tallene som er angitt. Disse verdiene kan endres basert på om du kobler til flere komponenter til Arduinoen som deretter kan kreve at pin-tilkoblingene flyttes rundt.
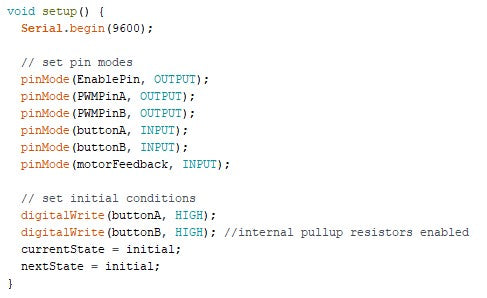
Programoppsett
Denne delen av koden konfigurerer de tilkoblede pinnene som inngang eller utgang. De to knappene kan settes til HØY eller LAV avhengig av hvordan du har koblet dem til (pull-up eller pull-down). Selv om Arduinoen har interne pull-up-motstander, kan det være lurt å legge til en ekstern motstand for å avbøte bryterne og forhindre falsk avfyring.
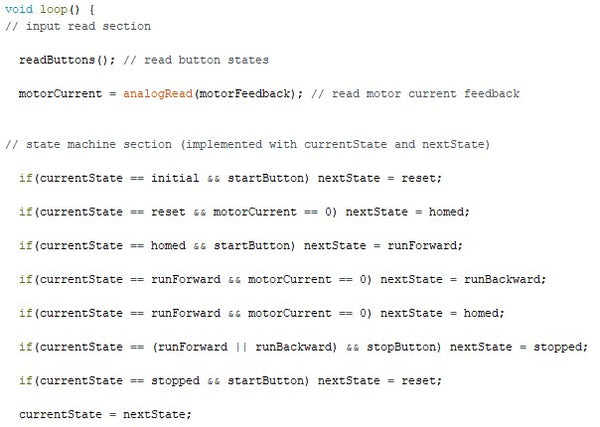
Hovedløkke
Hovedløkken sjekker konstant om knappene har blitt trykket inn og kjører en bestemt del av koden avhengig av resultatet fra trykknappfunksjonen. En tilstandsmaskindel er inkludert for å bestemme hva den Arduino-kontrollerte lineære aktuatoren gjør og hvordan den skal reagere basert på inngangene (dvs. trykknappene).
Trykknappfunksjoner
Disse funksjonene leser digitalt statusen til trykknappene for å styre en aktuator ved hjelp av en Arduino. Hver trykknappfunksjon har en avhoppingsløkke i hoved-if-setningen for å forhindre feiltenning og sending av feil signal til Arduinoen. En boolsk verdi er utdataene fra disse funksjonene. Hvis for eksempel startknappen trykkes, vil verdien av startButton endres til sann. Den boolske verdien brukes deretter i hovedløkken for å ta ytterligere beslutninger.

Siste ord
Funksjonaliteten til dette systemet går utover det som vises i denne artikkelen. Arduino mikrokontroller og MegaMoto Plus H-broen kan brukes til å implementere mye mer kompliserte kontrollrutiner. Dette oppsettet er i stand til variabel hastighetskontroll ved å bruke analogWrite-kommandoen til å stille inn PWM-signalet. Aktuatorens motorstrøm kan overvåkes for å brukes til lastregistrering for å utløse ytterligere kommandoer.
I tillegg kan ekstra sensorer kobles til en avansert Arduino-styrt lineær aktuator. For eksempel kan en ultralydsensor kobles til for å starte/stoppe motoren når du er en viss avstand unna, eller den kan brukes til å utløse en rekke andre spennende funksjoner. Mulighetene er uendelige. Men hvis det er lite pinner på Arduinoen, kan du velge en annen Arduino-modell. Alternativt kan flere Arduinoer kjedekobles sammen for å kommunisere med hverandre og ulike komponenter. Denne veien vil imidlertid kreve en anstendig mengde programmeringserfaring.
For ytterligere informasjon, vennligst send oss en e-post på sales@progressiveautomations.com, eller ring oss på 1-800-676-6123.