
- Introduksjon til hvordan aktuatorer fungerer
- Posisjonelle tilbakemeldingsmekanismer
- Typer kontrollsystemer for aktuatorer
- Tilbakemelding og feilretting
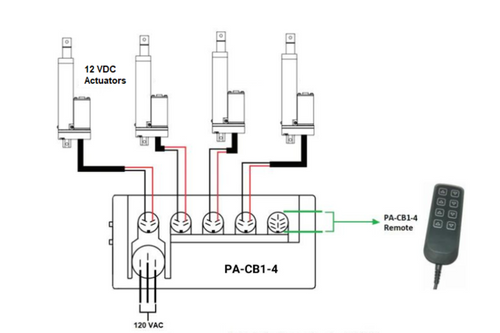
- Kontrollbokser for lineære aktuatorer
Introduksjon til hvordan aktuatorer fungerer
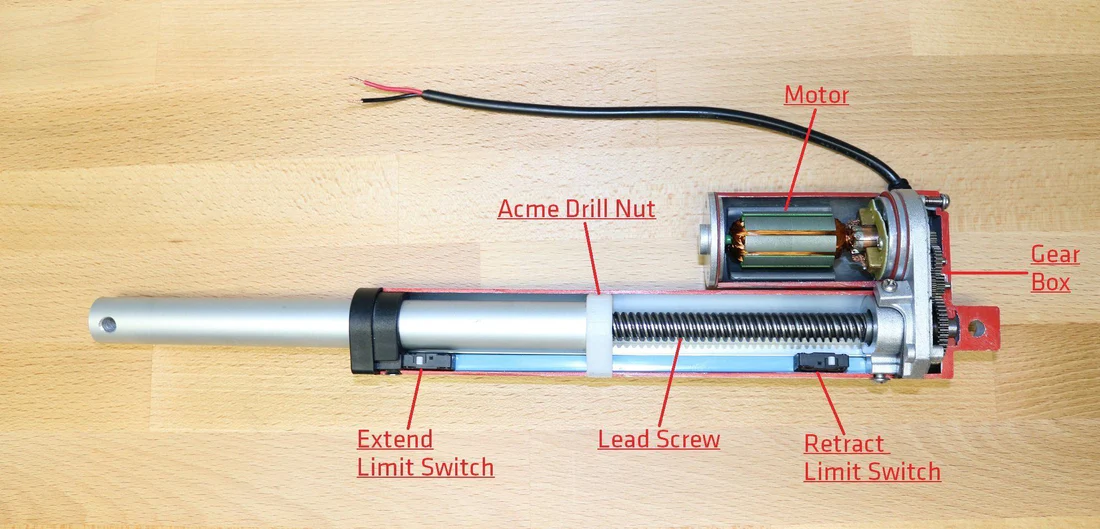
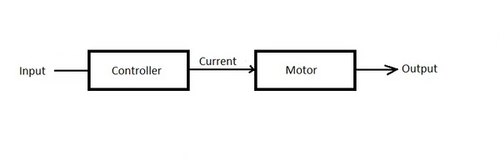
I elektriske lineære aktuatorer, elektrisk strøm brukes til å produsere rotasjonsbevegelse i en elektrisk motor som er mekanisk koblet til en girkasse og bruker en lead
screw å sykle aktuatorens aksel festet til en ACME boremutter for lineær bevegelse. Kontrollsystemer for aktuatorer har utviklet seg betydelig gjennom årene, noe som har forbedret allsidigheten og funksjonaliteten til disse enhetene. Lineære aktuatorer kan betjenes gjennom ulike metoder og kontrollmekanismer, inkludert:
• Trådløse kontrollere – gir brukerne bekvemmeligheten av fjernkontrollbetjening på avstand uten behov for fysiske kabler.
• Wi-Fi- og Bluetooth-kompatible kontrollere - muliggjør integrering i smarte systemer og tilgang via mobile enheter, med brukervennlige grensesnitt og mulighet til å justere innstillinger eksternt og presist.
Disse fremskrittene innen aktuatorteknologi og kontrollsystemer har utvidet omfanget av bruksområdene deres, noe som gjør dem uunnværlige i moderne automatiserte systemer. Enten det gjelder justering av vinduer i kjøretøy, som driver tunge oppgaver landbruksutstyr, eller automatisering av husholdningsapparater, aktuatorer fortsetter å være avgjørende for å oversette elektriske signaler til fysisk handling.

Forstå kontrollsystemer for aktuatorer
Hovedformålet med disse systemene er å sikre at aktuatorer fungerer nøyaktig, effektivt og pålitelig i henhold til forhåndsdefinerte parametere. Betydningen av kontrollsystemer i aktuatordrift kan ikke overvurderes, spesielt når det gjelder å oppnå presis og effektiv bevegelseskontroll. Disse systemene er avgjørende av flere grunner:
1. Presisjon: Kontrollsystemer muliggjør finjustering av aktuatorbevegelser for å oppnå høye nivåer av repeterbarhet og nøyaktighet. Dette er viktig i applikasjoner der nøyaktig posisjonering er kritisk, for eksempel i robotkirurgi eller luftfartsteknikk.
2. Effektivitet: Ved å optimalisere måten aktuatorer reagerer på kommandoer, reduserer kontrollsystemer energiforbruket og minimerer slitasje. Dette forlenger ikke bare levetiden til aktuatoren, men forbedrer også den totale effektiviteten til systemet den opererer i.
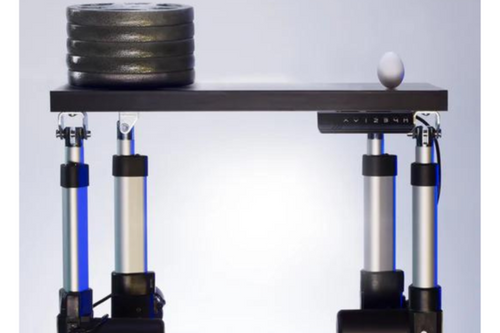
3. Tilpasningsevne: Tilbakemeldingsmekanismer kan justere oppførselen til kompatible aktuatorer i sanntid ved å analysere posisjonstilbakemeldingen fra kompatible aktuatorer. Denne tilpasningsevnen er viktig i dynamiske miljøer der forholdene endrer seg raskt, for eksempel i automatiserte produksjonsprosesser eller når flere aktuatorer opplever ujevn vektfordeling.
5. Sikkerhetsfunksjoner: Programmerte sikkerhetsfunksjoner som overbelastningsbeskyttelse bidrar til å forhindre skade på en aktuator eller applikasjonen ved å stoppe driften etter at kontrollboksen har oppdaget et for høyt elektrisk strømforbruk. En annen sikkerhetsfunksjon som finnes i kontrollbokser inkluderer overopphetingsbeskyttelse for å stoppe driften etter en viss syklustid for å sikre at driften holder seg innenfor en aktuators driftssyklus, og dermed unngå motorutbrenthet. Kontrollsystemer er grunnleggende for aktuatorenes funksjonalitet, og gir den nødvendige intelligensen og tilpasningsevnen for å sikre presisjon, effektivitet, sikkerhet og effektiv bevegelseskontroll. Deres rolle er sentral i det voksende feltet av automatiseringsteknologi, hvor bevegelsespresisjon ofte er hjørnesteinen i driftssuksess.
Komponenter og typer kontrollsystemer
Viktige komponenter i en grunnleggende kontrollboks
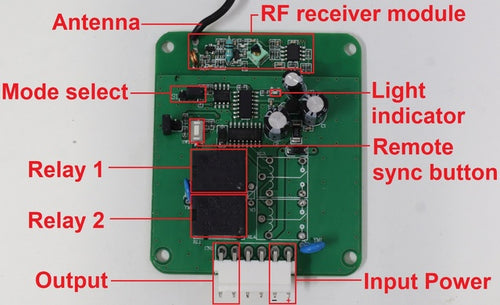
I en grunnleggende kontrollboks designet for elektriske lineære aktuatorer spiller hver komponent en avgjørende rolle for å sikre effektiv drift. Her er en oversikt over disse hovedkomponentene, deres funksjoner og formålene de tjener:1. Reléer: Reléer fungerer som brytere som styrer den elektriske kretsen med høy effekt ved hjelp av et laveffektsignal. For kontrollbokser designet for å administrere 2-tråds aktuatorer, er to reléer avgjørende for å reversere polariteten til spenningen som påføres over aktuatorens to ledninger, som igjen endrer bevegelsesretningen. Dette muliggjør toveis kontroll i et enkelt oppsett for å forlenge og trekke inn aktuatoren.
2. Inngangskanaler: Inngangskanaler er grensesnitt som Kontrollsystemet mottar elektriske signaler fra eksterne kilder som strømforsyninger eller signaler fra kablede fjernkontroller. Kontrollbokser som opererer med posisjonstilbakemelding kan også motta inndata fra sensorene til en aktuator. Disse kanalene behandler inndataene fra brukeren og/eller sensorer for å bestemme hvordan aktuatoren skal fungere, noe som gjør dem grunnleggende for å starte og kontrollere aktuatorbevegelser basert på spesifikke krav.
3. Utgangskanaler: Utgangskanaler leverer kontrollsignaler fra kontrolleren til aktuatoren eller andre komponenter som reléer. Kontrollbokser som opererer med posisjonstilbakemelding kan også sende ut elektrisk strøm slik at sensorene til en aktuator har strøm til å fungere. Disse kanalene er avgjørende for å utføre kommandoene som bestemmes av kontrollsystemet, og påvirker direkte aktuatorens oppførsel.
4. Fjernsynkroniseringsknapp: Denne knappen brukes til å synkronisere kontrollsystemet med en fjernkontrollenhet. Den sikrer at fjerninndataene gjenkjennes og behandles av kontrollsystemet, noe som muliggjør praktisk og fleksibel betjening på avstand.
5. Lysindikator: Lysindikatorer gir visuell tilbakemelding om systemets status. De kan være en indikator for strøm av/på, driftsmoduser, feiltilstander eller signalmottak, noe som hjelper med å overvåke og feilsøke systemet uten behov for komplekse diagnostiske verktøy.
6. Modusvalg: Denne funksjonen lar brukeren bytte mellom forskjellige driftsmoduser for kontrollboksen, for eksempel momentane eller ikke-momentane kontroller. I momentanmodus må en fjernkontrollknapp holdes kontinuerlig i aktiv posisjon for at enheten skal fungere. Når du slipper bryteren, slutter enheten å fungere. Ikke-momentanmodus fungerer som en bryter som forblir i sin siste innstilte posisjon til den endres igjen, uavhengig av om den trykkes inn. Dette betyr at når den er aktivert, fortsetter enheten å fungere til bryteren slås av manuelt.
7. Antenne: Antennen er en del av kontrollbokser som har et trådløst kommunikasjonsoppsett. Antenner brukes til å forbedre signalrekkevidden og kvaliteten mellom kontrollsystemet og fjernkontrollenheter eller mellom sammenkoblede systemer. Det er avgjørende for å opprettholde robust kommunikasjon i miljøer der direkte kabling er upraktisk eller uønsket.
8. RF-mottakermodul: Denne Modulen mottar radiofrekvenssignaler sendt av trådløse fjernkontroller. Den dekoder disse signalene til handlingsrettede kommandoer som kontrollsystemet kan forstå og reagere på. RF-mottakermodulen er viktig for trådløse kontrolloppsett, og muliggjør fjernbetjening av aktuatoren uten fysisk kontakt. Sammen danner disse komponentene et omfattende kontrollsystem for 2-tråds aktuatorer, som hver har en spesifikk funksjon som bidrar til den generelle effektiviteten og produktiviteten til aktuatorens drift. Dette systemet gir ikke bare presis kontroll over aktuatorens bevegelser, men forbedrer også brukergrensesnittet og interaksjonen, noe som gjør det tilpasningsdyktig til et bredt spekter av applikasjoner.
Posisjonelle tilbakemeldingsmekanismer
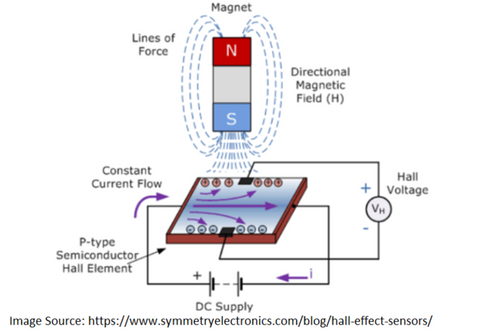
Hall-effektsensorer
Edwin Hall (som oppdaget Hall-effekten) hevdet at når et magnetfelt påføres i en retning vinkelrett på strømmen i en leder, induseres en spenningsforskjell. Denne spenningen kan brukes til å oppdage om en Hall-effektsensor er i nærheten av en magnet.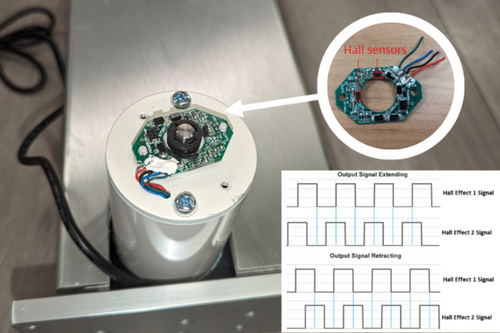
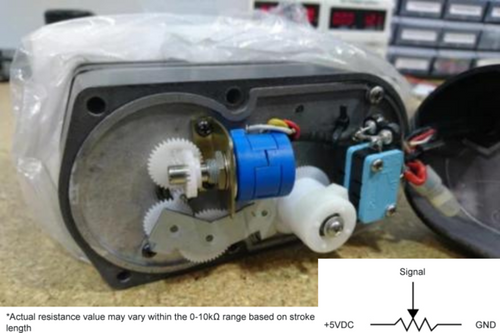
Potensiometre
Et potensiometer gir en variabel motstand som er proporsjonal med aktuatorens posisjon. Gir er ofte koblet mellom potensiometerets knott og aktuatorens roterende motor. Når aktuatoren beveger seg, endres motstandsverdien, som kan måles og konverteres til posisjonsdata. Denne informasjonen brukes deretter av et kontrollsystem til å gjøre finjusteringer av aktuatorens posisjon, noe som forbedrer nøyaktigheten.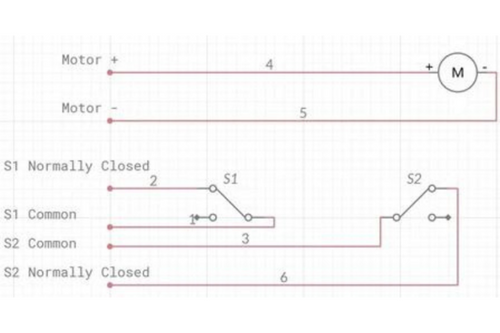
Tilbakemelding på grensebryter
Formålet med tilbakemeldingssignaler for grensebrytere er å la et system avgjøre om aktuatoren fysisk har utløst de interne grensebryterne. Denne typen tilbakemelding er enkel og nyttig for applikasjoner som hovedsakelig bare krever informasjon om hvorvidt aktuatoren har nådd helt utstrakt eller helt inntrukket posisjon.Typer kontrollsystemer for aktuatorer
Et eksempel på et enkelt åpent sløyfesystem inkluderer en momentan vippebryter koblet til en lineær aktuator. Dette krever at en operatør fysisk trykker og holder inne bryteren for at aktuatoren skal fortsette å sykle, og hvis bryteren slippes før aktuatoren har nådd enden av bevegelsen, stopper aktuatoren bevegelsen midtveis.
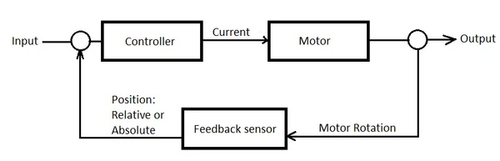
Valg av kontrollsystem og dets komponenter påvirker aktuatorenes funksjonalitet og ytelsesoptimalisering betydelig. Ved å integrere effektive tilbakemeldingsmekanismer og velge riktig type kontrollsystem, kan aktuatorer optimaliseres for et bredt spekter av applikasjoner, noe som sikrer både presisjon og pålitelighet i driften.
Tilbakemelding og feilretting
Variabler som kontrollsystemer korrigerer for
1. Posisjon: Kontrollsystemer bidrar til å sikre at en aktuator når og opprettholder ønsket posisjon nøyaktig ved å sammenligne brukerens posisjon med den faktiske posisjonsavlesningen fra posisjonsfølerne. Eksempler inkluderer når brukere av stående skrivebord trykker på en kontrollerknapp for å få aktuatorer til å bevege seg til en spesifikk forhåndsinnstilt minneposisjon for å justere arbeidsområdet fra sittende til stående høyde.
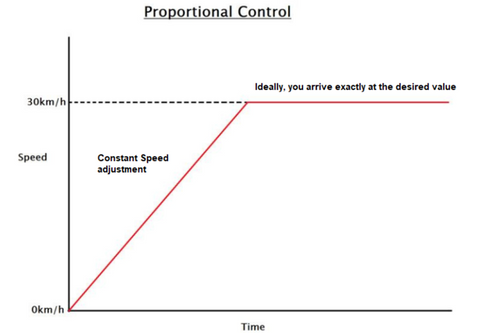
2. Hastighet: Å lese posisjonsfølelse og dele den tilbakelagte avstanden med hvor mye tid som har gått, vil resultere i kjørehastighet. Noen kontrollsystemer tillater justerbare hastighetsinnstillinger via PWM (Pulse Width Modulation), som gjør at aktuatoren kan bevege seg med forskjellige hastigheter basert på applikasjonens krav. Dette er nyttig i applikasjoner der varierende hastigheter er nødvendige, for eksempel for aktuatorer som driver bevegelsen til flysimulatorer.
3. Kraft: Enkelte kontrollsystemer kan regulere mengden kraft som utøves av aktuatorer, og sikre at den opererer innenfor sikre grenser og forhindrer skade på systemet eller omkringliggende komponenter. Ved å måle strømforbruket kan kontrollsystemer måle omtrent hvor mye kraft som utøves av lineære aktuatorer. Denne funksjonen er nyttig for lineære aktuatorer som åpner og lukker vinduer for å slå av strømmen og stoppe kraftpåføringen i tilfelle en persons hånd eller hindring blokkerer bevegelsesbanen.
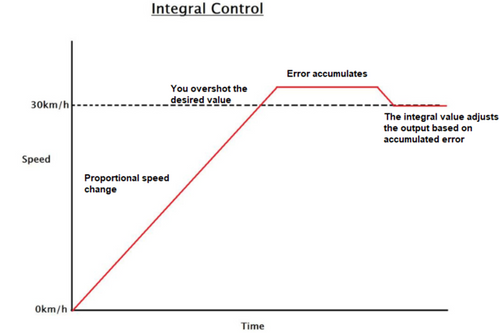
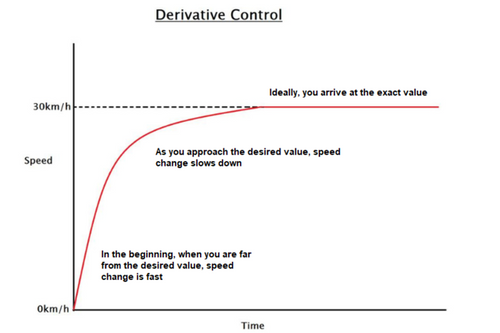
Typer kontrollstrategier
Velge riktig kontrollsystem
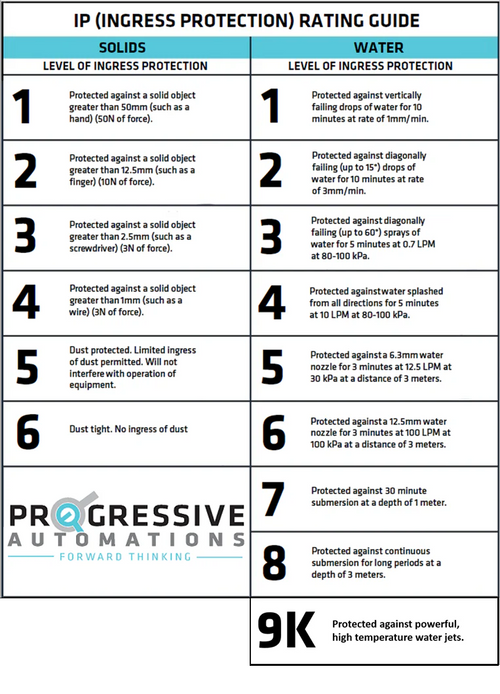
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Kontrollbokser av typen Hall-effekt
Les bloggen vår om applikasjoner for FLTCON-kontrollbokser for mer informasjon.
