Det finnes to metoder for kontroll av flere aktuatorer – parallell og synkron. Parallellkontroll sender ut en konstant spenning til hver aktuator, mens synkronkontroll sender ut variabel spenning til hver aktuator.
Prosessen med å synkronisere flere aktuatorer er nødvendig når man implementerer to eller flere aktuatorer for å bevege seg med samme hastighet. Dette kan oppnås med to former for posisjonstilbakemelding – Hall-effektsensorer og flerdreiepotensiometre.
Liten variasjon i aktuatorproduksjonen resulterer i en liten variasjon i aktuatorhastigheten. Dette kan korrigeres ved å sende en variabel spenning til aktuatoren for å matche to aktuatorhastigheter. Posisjonstilbakemeldingen er nødvendig for å bestemme hvor mye spenning som må sendes til hver aktuator.
Synkronisering av aktuatorer er viktig når man styrer to eller flere aktuatorer der presis kontroll er nødvendig. For eksempel applikasjoner som krever flere aktuatorer for å bevege en last samtidig som man opprettholder lik lastfordeling over hver aktuator. Hvis parallellkontroll ble brukt i denne typen applikasjon, kan det oppstå ujevn lastfordeling på grunn av varierende slaghastigheter og til slutt forårsake overdreven kraft på en av aktuatorene.
Hall-effektsensor
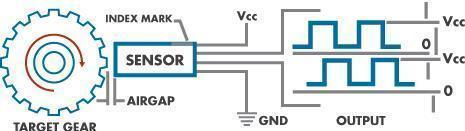
For å oppsummere Hall-effektteorien, hevdet Edwin Hall (som oppdaget Hall-effekten) at når et magnetfelt påføres i en retning vinkelrett på strømmen i en leder, induseres en spenningsforskjell. Denne spenningen kan brukes til å oppdage om sensoren er i nærheten av en magnet eller ikke. Ved å feste en magnet til motorens aksel, kan sensorene oppdage når akselen er parallell med dem.
Ved hjelp av et lite kretskort kan denne informasjonen sendes ut som en firkantbølge, som kan telles som en rekke pulser. Ved å telle disse pulsene kan du holde oversikt over hvor mange ganger motoren har snurret og hvordan motoren beveger seg.

Noen halleffektkretskort har flere sensorer på seg. Det er vanlig at de har to sensorer på 90 grader, noe som resulterer i en kvadraturutgang. Ved å telle disse pulsene og se hvilken som kommer først, kan du se hvilken retning motoren roterer i. Eller du kan bare overvåke begge sensorene og få flere tellinger for mer presis kontroll.
Synkronisering via Hall-effektsensortilbakemelding kan oppnås med progressive automatiseringer PA-40 synkronisert dobbel Hall-effektaktuatorkontroll eske.
Potensiometersynkronisering
Flerdreiepotensiometre, også kjent som reostater eller variable motstander, gir en analog representasjon av en aktuatorposisjon. Sensoren er festet til et girsystem festet til motoren som dreier potensiometeret og dermed justerer motstandsverdien proporsjonalt med hvor mye bevegelse aktuatoren har gjort. Den totale motstands-/spenningsendringen kan måles for å oppnå et fullskalaområde for den analoge verdien som representerer aktuatorens totale slaglengde. Potensiometrene som brukes i Progressive Automations-aktuatorer er 10 kΩ.
For synkroniseringsformål leses den analoge verdien til hvert potensiometer, som en program-/kontrollboks deretter kan bruke til å bestemme den nødvendige spenningsutgangen til hver aktuator. Potensiometersynkronisering kan oppnås via mikrokontroller programmering.
Viktigheten av synkronisering
På dette tidspunktet forklares synkroniseringsmetodene. Nå vil vi se på hvorfor synkronisering er viktig. Når målet med å bruke flere aktuatorer for å skyve eller trekke en last er nødvendig, må vi sørge for at aktuatorene samsvarer nøyaktig med hastighetene. Denne presisjonen i aktuatorhastighet er nødvendig for å sikre lik lastfordeling.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two PA-04 IP-66 lineær aktuator with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Endelige kontrollelementer
Viktigheten av å synkronisere aktuatorer koker ned til å sikre jevn bevegelse av flere aktuatorer og forhindre aktuatorsvikt.
Hall-effektkontrollboks
Når aktuatorer tilpasses med HALL-effektsensorer, PA-40 kontrollboks kan brukes til synkronisering av halleffekter.
Arduino mikrokontroller
Implementering av aktuatorkontroll kan oppnås via Arduino-programmering. Vennligst besøk følgende lenker for mer informasjon:
Hvis du har ytterligere spørsmål, ikke nøl med å kontakte ingeniøravdelingen støtte og få svaret umiddelbart.