
DC-motorer er mye brukt både i industrielle applikasjoner og hjemme for personlige prosjekter. En av de viktigste faktorene når man velger å bruke en DC-motor er om man skal koble en form for tilbakekobling til motoren.
Hva er tilbakemelding?
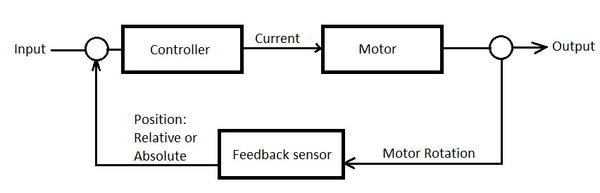
Tilbakemelding refererer til all informasjon som en kontroller kan bruke til å overvåke en prosess. I likestrømsmotorer samles tilbakemelding vanligvis inn i form av posisjon, antall rotasjoner og rotasjonsretning. Denne informasjonen kan deretter sendes til kontrolleren for å måle vinkelhastigheten og posisjonen til motorakselen. Dette er ofte kjent som en form for «lukket sløyfekontroll».
I mer sofistikerte brukstilfeller kan tilbakemeldingen fra motoren og andre kilder kontrolleres for ikke bare å oppnå presis hastighet og posisjon, men også ønsket dynamisk respons, synkronisering og stabilitet.
Fordeler med å bruke tilbakemeldinger
Når tilbakemelding implementeres riktig, kan den gjøre at maskineriet opererer mer effektivt og med høyere repeterbarhet. Tilbakemelding kan gjøre det mulig for mekanismen din å automatisk justere utgangen for å opprettholde stabilitet, redusere variasjoner og minimere feil uten behov for menneskelig innblanding.
Et enkelt eksempel på et godt tilbakekoblingskontrollsystem er termostaten. Kontrolleren måler temperaturen i rommet og justerer effekten fra varmeelementene for å opprettholde en innstilt temperatur.
En av hovedfordelene med tilbakekobling når det gjelder likestrømsmotorer er PID-kontroll. PID refererer til en kontrollsløyfemekanisme som er mye brukt i industrien for automatisk å kompensere for feil i maskinens hastighet eller posisjon.
Tilbakemelding kan også brukes til å implementere sikkerhetsmekanismer og feilsøke applikasjonen din. Hvis for eksempel lineære aktuatorer skal bevege seg synkront, men den ene henger etter, noe er galt. Systemet kan da stoppe bevegelsen til begge aktuatorene for å forhindre skade eller vipping.
Typer tilbakemeldingssensorer for likestrømsmotorer
De vanligste typene tilbakekobling for likestrømsmotorer er potensiometre, hall-effektsensorer og kodere. Når det gjelder presisjon og nøyaktighet, kan alle tre typene være sammenlignbare og er svært effektive med moderne teknologi. Forskjellene kommer når man vurderer spesifikke ytelseskrav som holdbarhet, miljøfaktorer, elektromagnetisk interferens og temperaturytelse.
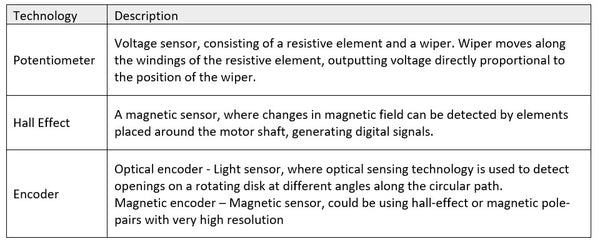
Potensiometer
Den største fordelen med denne typen tilbakemelding er dens enkelhet. Potensiometeret gjør effektivt en vanlig likestrømsmotor om til en servomotor, noe som gir presis bevegelse og/eller hastighetskontroll. Potensiometere gir direkte vinkelposisjonsinformasjon om motorakselen. Som et resultat, når systemet mister strøm, kan potensiometeret beholde posisjonsinformasjonen uten behov for å "gå til hjemmet". Dessuten, fordi potensiometere i kjernen bare er spenningsdelere med en stor motstand, er de gode til å håndtere elektromagnetisk interferens (EMI).
Det er også ulemper med bruk av potensiometre. Potensiometersensorer krever kontakt for å utføre målingene, noe som betyr at de vil være mindre holdbare og ha en begrenset levetid sammenlignet med andre former for tilbakekobling. Potensiometre er en relativt langsom måleform, både på grunn av behovet for kontakt og fordi de kan trenge en analog-til-digital-omformer før faktisk tilbakekoblingskontroll er etablert. Til slutt skaper potensiometre i motorer en begrensning på antall rotasjoner en aksel kan gjøre. Bruksområder med potensiometre-tilbakekobling må sørge for at det finnes en måte å forhindre overdreven bevegelse.
Hall-effekt
Hall-effektsensorer er en viktig del av motorfeedback fordi de er pålitelige, presise og har lang levetid. I motsetning til potensiometeret trenger ikke Hall-effektsensorene å ha noen kontakt, så de er nyttige i tøffe miljøer, svært motstandsdyktige mot slitasje og pålitelige i miljøer med høye støt. Hall-effektsensorer gir elektriske pulser når magneten er justert med sensorelektronikken. Av denne grunn er de egnet for høyhastighetsapplikasjoner og tillater forhåndsprogrammering av bestemte motorakselvinkler.
En av ulempene med Hall-effektsensorer er at de bare kan gi relativ posisjonsinformasjon. Dette betyr at hver gang systemet mister strøm, må Hall-effektsensorene flyttes til et kjent sted og tilbakestilles. Videre kan ledninger til Hall-effektsensorer som bærer informasjon være sårbare for elektromagnetisk interferens og støy. Av denne grunn kan signalene noen ganger gå tapt, eller falske signaler kan genereres, noe som betyr at posisjonsinformasjonen kan "drive" over tid.
Koder
Det finnes optiske og magnetiske kodere. Magnetiske kodere er sannsynligvis den beste sensoren totalt sett for å generere tilbakemeldingssignalerDe er kontaktløse, akkurat som Hall-effektsensorene, noe som betyr at de har en svært lang levetid. De er svært raske og har vanligvis svært høy oppløsning. Magnetiske kodere påvirkes heller ikke av støv eller andre partikler og kan brukes i en rekke miljøer.
Koderne er vanligvis dyre og krever dedikert elektronikk som kan være vanskelig å sette opp og kontrollere. Å legge til unødvendig kompleksitet i designet er ikke alltid en god idé, fordi det også vil øke antallet potensielle feilmoduser.
Det finnes en rekke former for tilbakemelding tilgjengelig for designere, og med fremskritt innen moderne teknologi kan de gjøres omtrent likeverdige når det gjelder nøyaktighet. Når man velger type tilbakemelding, må man vurdere ytelsesbehovene til applikasjonen sin og forstå fordelene med teknologiene de jobber med.