
- Introductie: hoe actuatoren werken
- Mechanismen voor positionele terugkoppeling
- Typen regelsystemen voor actuatoren
- Terugkoppeling en foutcorrectie
- Besturingskasten voor lineaire actuatoren
Introductie: hoe actuatoren werken
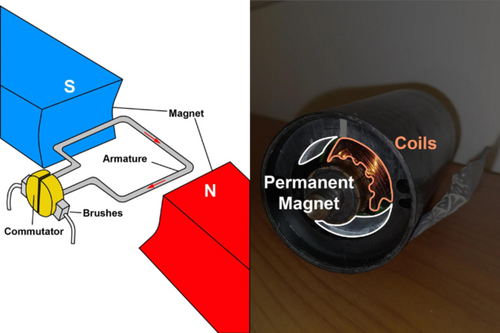
Actuatoren zijn fundamentele componenten in diverse mechanische systemen en spelen een cruciale rol bij het omzetten van energie in beweging. In essentie neemt een actuator een energiebron en zet die om in een fysieke beweging. Deze mogelijkheid is onmisbaar voor talloze toepassingen, van industriële machines tot consumentenelektronica en zelfs geavanceerde robotica. Het basisconcept achter actuatoren omvat de omzetting van energie, doorgaans elektrisch, hydraulisch of pneumatisch naar mechanische beweging. Dit wordt bereikt via verschillende componenten en mechanismen, afhankelijk van het type actuator. Zo kunnen elektrische actuatoren DC‑motoren met borstels gebruiken, terwijl hydraulische actuatoren met vloeistof gevulde zuigers benutten om beweging te genereren.
• Draadloze controllers - bieden gebruikers het gemak van bediening op afstand zonder fysieke kabels.
• Wi‑Fi‑ en Bluetooth‑compatibele controllers - maken integratie in slimme systemen en toegang via mobiele apparaten mogelijk, met gebruiksvriendelijke interfaces en de mogelijkheid om instellingen op afstand en uiterst precies aan te passen.
Deze vooruitgang in actuator‑ en regeltechnologie heeft het toepassingsgebied verbreed en ze onmisbaar gemaakt in moderne geautomatiseerde systemen. Of het nu gaat om het afstellen van ramen in voertuigen, het bedienen van zware landbouwapparatuur of het automatiseren van huishoudelijke apparaten, actuatoren blijven cruciaal om elektrische signalen te vertalen naar fysieke actie.
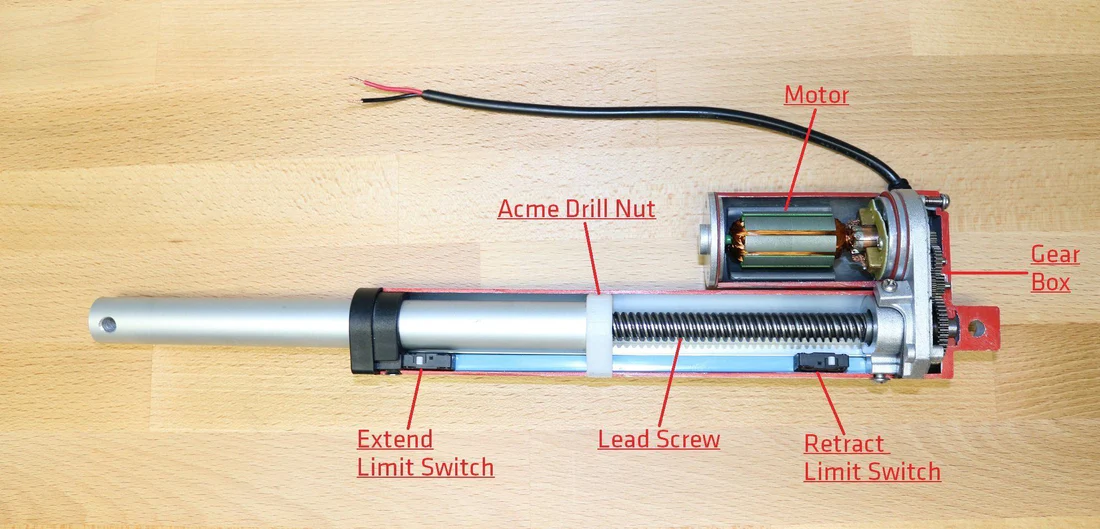
In elektrische lineaire actuatoren wordt elektrische stroom gebruikt om een rotatiebeweging op te wekken in een elektrische motor
die mechanisch is gekoppeld aan een tandwielkast en een leidschroef gebruikt om de as van de actuator te cyclen, die is verbonden met een ACME-moer voor lineaire beweging. Regelsystemen voor actuatoren hebben zich in de loop der jaren aanzienlijk ontwikkeld, waardoor de veelzijdigheid en functionaliteit van deze apparaten zijn vergroot. Lineaire actuatoren kunnen worden bediend via verschillende middelen en regelmechanismen, waaronder:
• Draadloze controllers - bieden gebruikers het gemak van bediening op afstand zonder fysieke kabels.
• Wi‑Fi‑ en Bluetooth‑compatibele controllers - maken integratie in slimme systemen en toegang via mobiele apparaten mogelijk, met gebruiksvriendelijke interfaces en de mogelijkheid om instellingen op afstand en uiterst precies aan te passen.
Deze vooruitgang in actuator‑ en regeltechnologie heeft het toepassingsgebied verbreed en ze onmisbaar gemaakt in moderne geautomatiseerde systemen. Of het nu gaat om het afstellen van ramen in voertuigen, het bedienen van zware landbouwapparatuur of het automatiseren van huishoudelijke apparaten, actuatoren blijven cruciaal om elektrische signalen te vertalen naar fysieke actie.

Regelsystemen voor actuatoren begrijpen
Besturingssystemen zijn essentiële onderdelen van de werking van elektrische lineaire actuatoren. Ze zijn ontworpen om de werking te beheren en het bewegingsgedrag van deze apparaten te sturen. Populaire oplossingen zoals besturingskasten zijn een type besturingssysteem voor lineaire actuatoren waarbij alle elektronische componenten in een behuizing, vaak in de vorm van een doos, zijn ondergebracht. In essentie interpreteert een besturingssysteem invoercommando's, zowel handmatig als geautomatiseerd, en vertaalt deze naar signalen die de beweging van de actuator aanpassen. Het primaire doel van deze systemen is ervoor te zorgen dat actuatoren nauwkeurig, efficiënt en betrouwbaar functioneren volgens vooraf gedefinieerde parameters. Het belang van besturingssystemen voor de werking van actuatoren kan niet genoeg benadrukt worden, met name als het gaat om het bereiken van nauwkeurige en efficiënte bewegingsbesturing. Deze systemen zijn om verschillende redenen cruciaal:
1. Precisie: Besturingssystemen maken het mogelijk om de bewegingen van actuatoren nauwkeurig af te stellen om een hoge mate van herhaalbaarheid en nauwkeurigheid te bereiken. Dit is essentieel in toepassingen waar exacte positionering cruciaal is, zoals bij robotchirurgie of lucht- en ruimtevaarttechniek.
2. Efficiëntie: Door de manier waarop actuatoren op commando's reageren te optimaliseren, verminderen besturingssystemen het energieverbruik en minimaliseren ze slijtage. Dit verlengt niet alleen de levensduur van de actuator, maar verbetert ook de algehele efficiëntie van het systeem waarin deze functioneert.
3. Aanpasbaarheid: Feedbackmechanismen kunnen het gedrag van compatibele actuatoren in realtime aanpassen door de positiefeedback van compatibele actuatoren te analyseren. Deze aanpasbaarheid is essentieel in dynamische omgevingen waar de omstandigheden snel veranderen, zoals in geautomatiseerde productieprocessen of wanneer meerdere actuatoren een ongelijke gewichtsverdeling hebben.
1. Precisie: Besturingssystemen maken het mogelijk om de bewegingen van actuatoren nauwkeurig af te stellen om een hoge mate van herhaalbaarheid en nauwkeurigheid te bereiken. Dit is essentieel in toepassingen waar exacte positionering cruciaal is, zoals bij robotchirurgie of lucht- en ruimtevaarttechniek.
2. Efficiëntie: Door de manier waarop actuatoren op commando's reageren te optimaliseren, verminderen besturingssystemen het energieverbruik en minimaliseren ze slijtage. Dit verlengt niet alleen de levensduur van de actuator, maar verbetert ook de algehele efficiëntie van het systeem waarin deze functioneert.
3. Aanpasbaarheid: Feedbackmechanismen kunnen het gedrag van compatibele actuatoren in realtime aanpassen door de positiefeedback van compatibele actuatoren te analyseren. Deze aanpasbaarheid is essentieel in dynamische omgevingen waar de omstandigheden snel veranderen, zoals in geautomatiseerde productieprocessen of wanneer meerdere actuatoren een ongelijke gewichtsverdeling hebben.
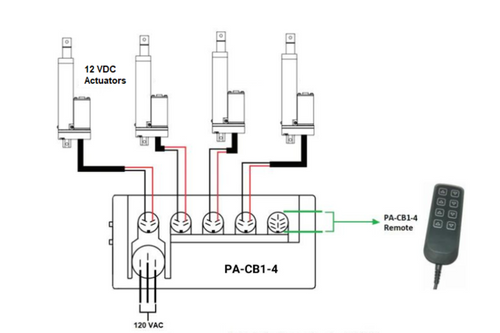
4. Integratie: Besturingssystemen maken het vaak mogelijk dat actuatoren samenwerken met andere bestaande systemen, waardoor complexe bewerkingen mogelijk worden met eenvoudige inputs die naar het besturingssysteem worden gestuurd. Deze integratie wordt ondersteund door verbeteringen in connectiviteit en programmering. In sommige besturingssystemen kunnen de ingebouwde transformatoren ook dienen als naadloze integratie door te fungeren als spanningsomvormer wanneer bijvoorbeeld een 120 VAC-ingangsbron nodig is om een 12 VDC-actuator van stroom te voorzien. 5. Veiligheidsfuncties: Geprogrammeerde veiligheidsfuncties, zoals overbelastingsbeveiliging, helpen schade aan een actuator of de toepassing te voorkomen door de werking te stoppen nadat de besturingskast een te hoge stroomsterkte heeft gedetecteerd. Een andere veiligheidsfunctie die te vinden is in besturingskasten is oververhittingsbeveiliging. Deze beveiliging stopt de werking na een bepaalde cyclustijd om ervoor te zorgen dat de actuator binnen de maximale inschakelduur blijft en zo doorbranden van de motor te voorkomen. Besturingssystemen zijn essentieel voor de functionaliteit van actuatoren. Ze bieden de nodige intelligentie en aanpassingsvermogen om precisie, efficiëntie, veiligheid en effectieve bewegingsbesturing te garanderen. Hun rol is cruciaal in de groeiende wereld van automatiseringstechnologie, waar bewegingsprecisie vaak de hoeksteen van operationeel succes is.
Componenten en typen regelsystemen
Besturingssystemen voor elektrische lineaire actuatoren bestaan uit verschillende belangrijke componenten die een nauwkeurige en efficiënte werking mogelijk maken. Inzicht in deze componenten en de principes erachter is cruciaal voor het optimaliseren van de prestaties van lineaire actuatoren.
1. Relais: Relais fungeren als schakelaars die het elektrische circuit met hoog vermogen aansturen met een signaal met laag vermogen. Voor besturingskasten die ontworpen zijn om 2-draads actuatoren aan te sturen, zijn twee relais essentieel om de polariteit van de spanning over de twee draden van de actuator om te keren, waardoor de bewegingsrichting verandert. Dit maakt bidirectionele aansturing mogelijk in een eenvoudige opstelling om de actuator uit te schuiven en in te trekken.
2. Invoerkanalen: Invoerkanalen zijn interfaces waarmee het besturingssysteem elektrische signalen ontvangt van externe bronnen, zoals voedingen of signalen van bedrade afstandsbedieningen. Besturingskasten die werken met positiefeedback kunnen ook input ontvangen van de sensoren van een actuator. Deze kanalen verwerken de input van de gebruiker en/of sensoren om te bepalen hoe de actuator moet werken, waardoor ze essentieel zijn voor het initiëren en besturen van actuatorbewegingen op basis van specifieke vereisten.
3. Uitvoerkanalen: Uitvoerkanalen leveren stuursignalen van de controller aan de actuator of andere componenten zoals relais. Besturingskasten die werken met positiefeedback kunnen ook elektrische stroom leveren, zodat de sensoren van een actuator van stroom worden voorzien om te werken. Deze kanalen zijn cruciaal voor het uitvoeren van de commando's die door het besturingssysteem worden bepaald en beïnvloeden direct het gedrag van de actuator.
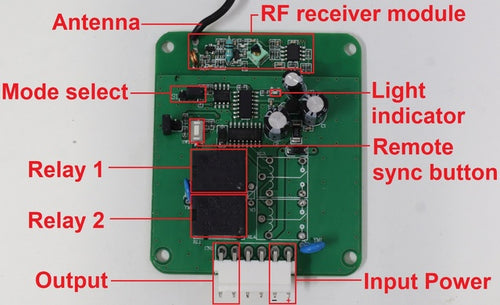
4. Synchronisatieknop op afstand: Deze knop wordt gebruikt om het besturingssysteem te synchroniseren met een afstandsbediening. Het zorgt ervoor dat de ingangen van de afstandsbediening door het besturingssysteem worden herkend en verwerkt, waardoor een gemakkelijke en flexibele bediening op afstand mogelijk is.
5. Indicatielampje: Indicatielampjes geven visuele feedback over de status van het systeem. Ze kunnen een indicator zijn voor het in- en uitschakelen, de bedrijfsmodi, foutmeldingen of signaalontvangst, wat helpt bij het bewaken en oplossen van problemen met het systeem zonder dat complexe diagnoseapparatuur nodig is.
6. Modusselectie: Met deze functie kan de gebruiker schakelen tussen verschillende bedrijfsmodi van de bedieningskast, zoals momentane of niet-momentane bediening. In de momentane modus moet een knop op de afstandsbediening continu ingedrukt worden gehouden om het apparaat te laten werken. Zodra u de schakelaar loslaat, stopt het apparaat met functioneren. De niet-momentane modus werkt als een schakelaar die in de laatst ingestelde positie blijft staan totdat deze opnieuw wordt gewijzigd, ongeacht of deze wordt ingedrukt. Dit betekent dat het apparaat, eenmaal geactiveerd, blijft werken totdat de schakelaar handmatig wordt uitgeschakeld. 7. Antenne: De antenne maakt deel uit van bedieningskasten met een draadloze communicatie-opstelling. Antennes worden gebruikt om het signaalbereik en de signaalkwaliteit tussen het besturingssysteem en afstandsbedieningen of tussen onderling verbonden systemen te verbeteren. Het is cruciaal voor het behoud van een robuuste communicatie in omgevingen waar directe bekabeling onpraktisch of onwenselijk is. 8. RF-ontvangermodule: Deze module ontvangt radiofrequentiesignalen die worden verzonden door draadloze afstandsbedieningen. Hij decodeert deze signalen in uitvoerbare commando's die het besturingssysteem kan begrijpen en waarop het kan reageren. De RF-ontvangermodule is essentieel voor draadloze bedieningssystemen, waardoor de actuator op afstand kan worden bediend zonder fysiek contact. Samen vormen deze componenten een uitgebreid besturingssysteem voor 2-draads actuatoren, waarbij elke component een specifieke functie vervult die bijdraagt aan de algehele effectiviteit en efficiëntie van de actuatorwerking. Dit systeem maakt niet alleen nauwkeurige controle over de bewegingen van de actuator mogelijk, maar verbetert ook de gebruikersinterface en interactie, waardoor het aanpasbaar is aan een breed scala aan toepassingen.
Belangrijkste componenten van een basisbesturingskast
In een basisbesturingskast voor elektrische lineaire actuatoren speelt elk component een cruciale rol in het garanderen van een efficiënte werking. Hieronder volgt een overzicht van deze belangrijke componenten, hun functies en de doelen die ze dienen:1. Relais: Relais fungeren als schakelaars die het elektrische circuit met hoog vermogen aansturen met een signaal met laag vermogen. Voor besturingskasten die ontworpen zijn om 2-draads actuatoren aan te sturen, zijn twee relais essentieel om de polariteit van de spanning over de twee draden van de actuator om te keren, waardoor de bewegingsrichting verandert. Dit maakt bidirectionele aansturing mogelijk in een eenvoudige opstelling om de actuator uit te schuiven en in te trekken.
2. Invoerkanalen: Invoerkanalen zijn interfaces waarmee het besturingssysteem elektrische signalen ontvangt van externe bronnen, zoals voedingen of signalen van bedrade afstandsbedieningen. Besturingskasten die werken met positiefeedback kunnen ook input ontvangen van de sensoren van een actuator. Deze kanalen verwerken de input van de gebruiker en/of sensoren om te bepalen hoe de actuator moet werken, waardoor ze essentieel zijn voor het initiëren en besturen van actuatorbewegingen op basis van specifieke vereisten.
3. Uitvoerkanalen: Uitvoerkanalen leveren stuursignalen van de controller aan de actuator of andere componenten zoals relais. Besturingskasten die werken met positiefeedback kunnen ook elektrische stroom leveren, zodat de sensoren van een actuator van stroom worden voorzien om te werken. Deze kanalen zijn cruciaal voor het uitvoeren van de commando's die door het besturingssysteem worden bepaald en beïnvloeden direct het gedrag van de actuator.
4. Synchronisatieknop op afstand: Deze knop wordt gebruikt om het besturingssysteem te synchroniseren met een afstandsbediening. Het zorgt ervoor dat de ingangen van de afstandsbediening door het besturingssysteem worden herkend en verwerkt, waardoor een gemakkelijke en flexibele bediening op afstand mogelijk is.
5. Indicatielampje: Indicatielampjes geven visuele feedback over de status van het systeem. Ze kunnen een indicator zijn voor het in- en uitschakelen, de bedrijfsmodi, foutmeldingen of signaalontvangst, wat helpt bij het bewaken en oplossen van problemen met het systeem zonder dat complexe diagnoseapparatuur nodig is.
6. Modusselectie: Met deze functie kan de gebruiker schakelen tussen verschillende bedrijfsmodi van de bedieningskast, zoals momentane of niet-momentane bediening. In de momentane modus moet een knop op de afstandsbediening continu ingedrukt worden gehouden om het apparaat te laten werken. Zodra u de schakelaar loslaat, stopt het apparaat met functioneren. De niet-momentane modus werkt als een schakelaar die in de laatst ingestelde positie blijft staan totdat deze opnieuw wordt gewijzigd, ongeacht of deze wordt ingedrukt. Dit betekent dat het apparaat, eenmaal geactiveerd, blijft werken totdat de schakelaar handmatig wordt uitgeschakeld. 7. Antenne: De antenne maakt deel uit van bedieningskasten met een draadloze communicatie-opstelling. Antennes worden gebruikt om het signaalbereik en de signaalkwaliteit tussen het besturingssysteem en afstandsbedieningen of tussen onderling verbonden systemen te verbeteren. Het is cruciaal voor het behoud van een robuuste communicatie in omgevingen waar directe bekabeling onpraktisch of onwenselijk is. 8. RF-ontvangermodule: Deze module ontvangt radiofrequentiesignalen die worden verzonden door draadloze afstandsbedieningen. Hij decodeert deze signalen in uitvoerbare commando's die het besturingssysteem kan begrijpen en waarop het kan reageren. De RF-ontvangermodule is essentieel voor draadloze bedieningssystemen, waardoor de actuator op afstand kan worden bediend zonder fysiek contact. Samen vormen deze componenten een uitgebreid besturingssysteem voor 2-draads actuatoren, waarbij elke component een specifieke functie vervult die bijdraagt aan de algehele effectiviteit en efficiëntie van de actuatorwerking. Dit systeem maakt niet alleen nauwkeurige controle over de bewegingen van de actuator mogelijk, maar verbetert ook de gebruikersinterface en interactie, waardoor het aanpasbaar is aan een breed scala aan toepassingen.
Mechanismen voor positionele terugkoppeling
Positionele terugkoppeling is essentieel om de precisie en nauwkeurigheid van actuatoren te verbeteren. Drie veelvoorkomende typen terugkoppelingsmechanismen zijn Hall‑effectsensoren, potentiometers en terugkoppeling via eindschakelaars.
Hall‑effectsensoren
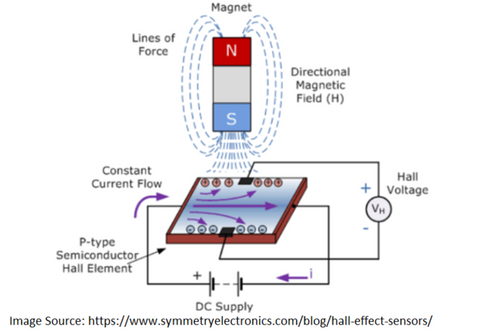
Volgens de Hall‑effecttheorie van Edwin Hall (de ontdekker van het Hall‑effect) wordt er, wanneer een magnetisch veld wordt aangelegd in een richting die loodrecht staat op de stroom van elektrische stroom in een geleider, een spanningsverschil geïnduceerd. Met deze spanning kan worden gedetecteerd of een Hall‑effectsensor zich in de nabijheid van een magneet bevindt.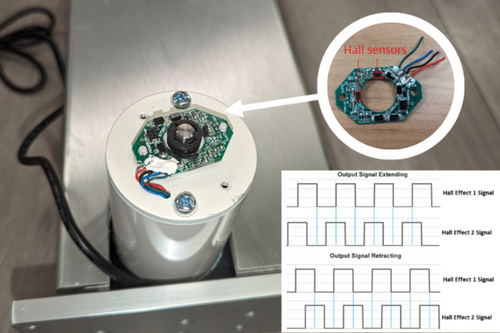
Door een magneet op de roterende as van een motor te bevestigen, kunnen Hall‑effectsensoren detecteren wanneer de as evenwijdig aan hen staat. Met behulp van een kleine printplaat kan deze informatie worden uitgegeven als een vierkantsgolf, vergelijkbaar met optische encoders. Het is gebruikelijk dat Hall‑effect‑printplaten twee sensoren hebben, wat resulteert in een kwadratuuruitsignaal waarbij twee signalen stijgen en dalen terwijl de elektromotor draait, met een fasenverschil van 90° tussen beide. Door deze pulsen te tellen en te zien welk signaal eerst komt, kunnen regelsystemen bepalen in welke richting de motor draait.
Potentiometers
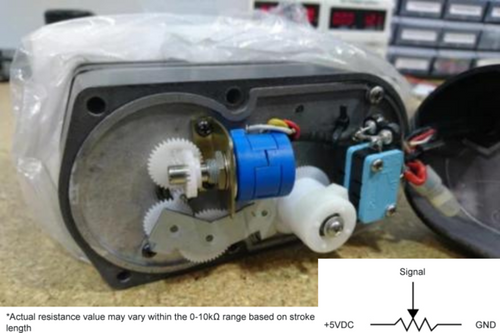
Een potentiometer levert een variabele weerstand die evenredig is met de positie van de actuator. Vaak zijn er tandwielen gekoppeld tussen de knop van de potentiometer en de roterende motor van de actuator. Terwijl de actuator beweegt, verandert de weerstandswaarde, die kan worden gemeten en omgezet in positiedata. Deze informatie wordt vervolgens door een regelsysteem gebruikt om fijne aanpassingen aan de positie van de actuator te maken, waardoor de nauwkeurigheid toeneemt.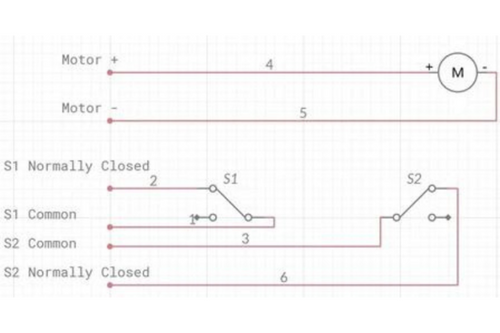
Terugkoppeling via eindschakelaar
Het doel van terugkoppelingssignalen van eindschakelaars is een systeem in staat te stellen te bepalen of de actuator de interne eindschakelaars fysiek heeft geactiveerd. Dit soort terugkoppeling is eenvoudig en nuttig voor toepassingen die voornamelijk alleen informatie nodig hebben over de vraag of de actuator de volledig uitgeschoven of volledig ingetrokken positie heeft bereikt.Typen regelsystemen voor actuatoren
Regelsystemen voor actuatoren kunnen grofweg in twee typen worden onderverdeeld:
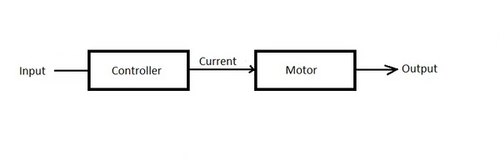
Open‑loop‑regelsystemen: In deze systemen wordt de actuator uitsluitend aangestuurd op basis van de invoercommando’s, zonder terugkoppeling over de daadwerkelijke positie. Hoewel eenvoudiger en minder kostbaar, missen open‑loop‑systemen de mogelijkheid om positioneringsfouten te corrigeren, waardoor ze minder nauwkeurig zijn dan hun tegenhangers.
Een voorbeeld van een eenvoudig open‑loop‑systeem is een momentane wipschakelaar die bedraad is naar een lineaire actuator. Dit vereist dat een operator de schakelaar fysiek indrukt en ingedrukt houdt om de actuator te laten doorgaan met cyclen; het loslaten van de schakelaar voordat de actuator het einde van de slag heeft bereikt, resulteert erin dat de actuator halverwege stopt met bewegen.
Een voorbeeld van een eenvoudig open‑loop‑systeem is een momentane wipschakelaar die bedraad is naar een lineaire actuator. Dit vereist dat een operator de schakelaar fysiek indrukt en ingedrukt houdt om de actuator te laten doorgaan met cyclen; het loslaten van de schakelaar voordat de actuator het einde van de slag heeft bereikt, resulteert erin dat de actuator halverwege stopt met bewegen.
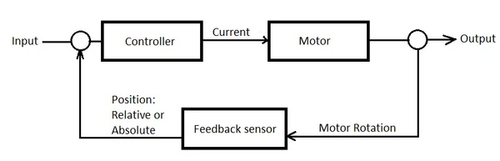
Closed‑loop‑regelsystemen:
Deze systemen bevatten terugkoppelingsmechanismen, zoals Hall‑effectsensoren of potentiometers, om de stuursignalen continu aan te passen op basis van de werkelijke positie van de actuator. Deze terugkoppelingslus maakt precieze besturing en foutcorrectie mogelijk, waardoor closed‑loop‑systemen ideaal zijn voor toepassingen waar nauwkeurigheid cruciaal is. Closed‑loop‑regelsystemen komen vaak voor in toepassingen die microcontrollers, besturingskasten en PLC’s gebruiken die geprogrammeerd zijn om actuatoren specifieke functies te laten uitvoeren.
De keuze van het regelsysteem en de componenten heeft een aanzienlijke impact op de functionaliteit en prestatieoptimalisatie van actuatoren. Door effectieve terugkoppelingsmechanismen te integreren en het juiste type regelsysteem te selecteren, kunnen actuatoren worden geoptimaliseerd voor een breed scala aan toepassingen, waarbij zowel precisie als betrouwbaarheid in hun werking worden gewaarborgd.
De keuze van het regelsysteem en de componenten heeft een aanzienlijke impact op de functionaliteit en prestatieoptimalisatie van actuatoren. Door effectieve terugkoppelingsmechanismen te integreren en het juiste type regelsysteem te selecteren, kunnen actuatoren worden geoptimaliseerd voor een breed scala aan toepassingen, waarbij zowel precisie als betrouwbaarheid in hun werking worden gewaarborgd.
Terugkoppeling en foutcorrectie
In een ideale omgeving zouden lineaire actuatoren zich altijd voorspelbaar gedragen; verstoringen kunnen echter optreden in de vorm van harde wind, ongelijke gewichtsverdeling, fysieke obstakels en mechanische slijtage. Een deel van deze verstoringen kan worden ondervangen met regelsystemen die zijn geprogrammeerd om te werken met lineaire actuatoren die compatibele terugkoppeling hebben, zodat fouten worden uitgelezen en vervolgens foutcorrectiestrategieën worden uitgevoerd om de gewenste resultaten te bereiken.
1. Positie: Regelsystemen helpen ervoor te zorgen dat een actuator de gewenste positie nauwkeurig bereikt en behoudt door de positie van de gebruiker te vergelijken met de werkelijke positieweergave van de positionele terugkoppelingssensoren. Voorbeelden hiervan zijn wanneer gebruikers van zit‑sta‑bureaus op een knop van een controller drukken om actuatoren naar een specifieke vooraf ingestelde geheugenpositie te laten gaan, zodat hun werkplek van zit- naar stahoogte wordt aangepast.
2. Snelheid: Door de positionele terugkoppeling te lezen en de afgelegde afstand te delen door de verstreken tijd, verkrijgt men de reissnelheid. Sommige regelsystemen bieden instelbare snelheidsinstellingen via PWM (Pulse Width Modulation), waardoor de actuator met verschillende snelheden kan bewegen op basis van de eisen van de toepassing. Dit is nuttig in toepassingen waar variabele snelheden nodig zijn, zoals voor actuatoren die de beweging van vluchtsimulators aandrijven.
3. Kracht: Bepaalde regelsystemen kunnen de hoeveelheid kracht reguleren die door actuatoren wordt uitgeoefend, zodat deze binnen veilige limieten blijft en schade aan het systeem of omliggende componenten wordt voorkomen. Door de elektrische stroomopname te meten, kunnen regelsystemen ongeveer inschatten hoeveel kracht lineaire actuatoren uitoefenen. Deze functie is nuttig voor lineaire actuatoren die ramen openen en sluiten, om de stroom uit te schakelen en het kracht uitoefenen te stoppen als de hand van een persoon of een obstakel het bewegingspad blokkeert.
Variabelen waarvoor regelsystemen corrigeren
1. Positie: Regelsystemen helpen ervoor te zorgen dat een actuator de gewenste positie nauwkeurig bereikt en behoudt door de positie van de gebruiker te vergelijken met de werkelijke positieweergave van de positionele terugkoppelingssensoren. Voorbeelden hiervan zijn wanneer gebruikers van zit‑sta‑bureaus op een knop van een controller drukken om actuatoren naar een specifieke vooraf ingestelde geheugenpositie te laten gaan, zodat hun werkplek van zit- naar stahoogte wordt aangepast.
2. Snelheid: Door de positionele terugkoppeling te lezen en de afgelegde afstand te delen door de verstreken tijd, verkrijgt men de reissnelheid. Sommige regelsystemen bieden instelbare snelheidsinstellingen via PWM (Pulse Width Modulation), waardoor de actuator met verschillende snelheden kan bewegen op basis van de eisen van de toepassing. Dit is nuttig in toepassingen waar variabele snelheden nodig zijn, zoals voor actuatoren die de beweging van vluchtsimulators aandrijven.
3. Kracht: Bepaalde regelsystemen kunnen de hoeveelheid kracht reguleren die door actuatoren wordt uitgeoefend, zodat deze binnen veilige limieten blijft en schade aan het systeem of omliggende componenten wordt voorkomen. Door de elektrische stroomopname te meten, kunnen regelsystemen ongeveer inschatten hoeveel kracht lineaire actuatoren uitoefenen. Deze functie is nuttig voor lineaire actuatoren die ramen openen en sluiten, om de stroom uit te schakelen en het kracht uitoefenen te stoppen als de hand van een persoon of een obstakel het bewegingspad blokkeert.
Typen regelstrategieën
In de industrie worden verschillende regelstrategieën gebruikt om een redelijk niveau van precisie in bewegingscontrole te bereiken. Elk van deze regelstrategieën biedt verschillende voordelen en is geschikt voor uiteenlopende toepassingen, afhankelijk van de mate van controle en precisie die het systeem vereist. Enkele veelgebruikte regelstrategieën voor elektrische lineaire actuatoren zijn:
1. Aan/uit‑regeling: Dit is de eenvoudigste vorm van regeling die wordt gebruikt met elektrische lineaire actuatoren en komt vaak voor in open‑loop‑regelsystemen. Het houdt in dat de elektrische stroom naar de actuator aan of uit wordt gezet zonder tussenstand. Deze methode is rechttoe rechtaan en wordt gebruikt in toepassingen waarbij precieze controle over de positie niet noodzakelijk is. De actuator werkt op volle kracht totdat hij een ingestelde eindschakelaar bereikt of zijn taak voltooit; op dat moment schakelt hij uit.
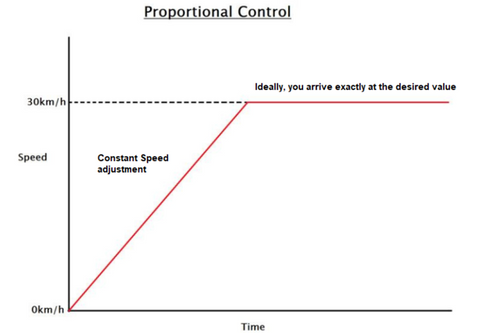
2. P (proportionele regeling): Proportionele regeling past de vermogensinvoer van de actuator aan op basis van de fout, dat is het verschil tussen de gemeten werkelijke positie/kracht en de gewenste waarde van de gebruiker. Het stuursignaal is evenredig met deze fout; hoe groter de fout, hoe sterker de respons van de actuator. Deze methode maakt een soepelere werking mogelijk dan aan/uit‑regeling, maar kan nog steeds resulteren in een stationaire fout als ze niet wordt gecombineerd met andere regeltypen.
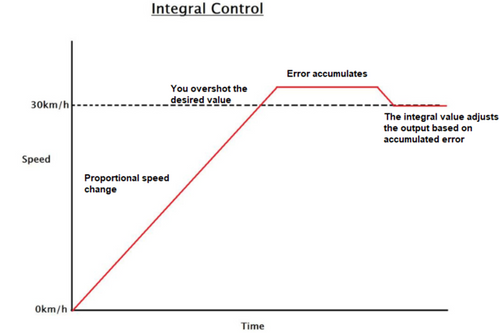
3. PI (proportioneel‑integrale regeling): Deze strategie verbetert de proportionele regeling door een integraalterm toe te voegen, die het probleem van stationaire fout aanpakt. De integrale component somt de fouten uit het verleden in de tijd op en biedt zo een cumulatieve corrigerende actie die de fout naar nul stuurt. Hierdoor kan de actuator de gewenste positie/kracht van de gebruiker niet alleen nauwkeuriger bereiken, maar ook behouden.
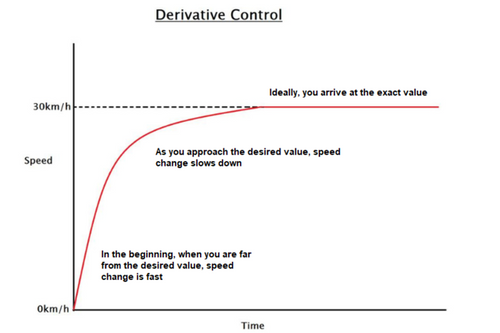
4. PID‑regeling (proportioneel‑integraal‑differentieel): PID‑regeling is een geavanceerdere methode die drie typen regelstrategieën — proportioneel, integraal en differentieel — combineert om een precieze en stabiele besturing van de actuator te bieden. De proportionele component hangt af van de huidige fout, de integrale component telt fouten uit het verleden op en de differentiële component voorspelt toekomstige fouten op basis van de verandering in tijd. Deze allesomvattende aanpak maakt zeer nauwkeurige controle mogelijk over de positie, kracht en snelheid van de actuator, waardoor het ideaal is voor complexe en dynamische systemen waarbij precisie cruciaal is.
Het juiste regelsysteem kiezen
Bij het selecteren van regelsystemen voor uw elektrische lineaire actuatoren is het belangrijk rekening te houden met de volgende factoren:
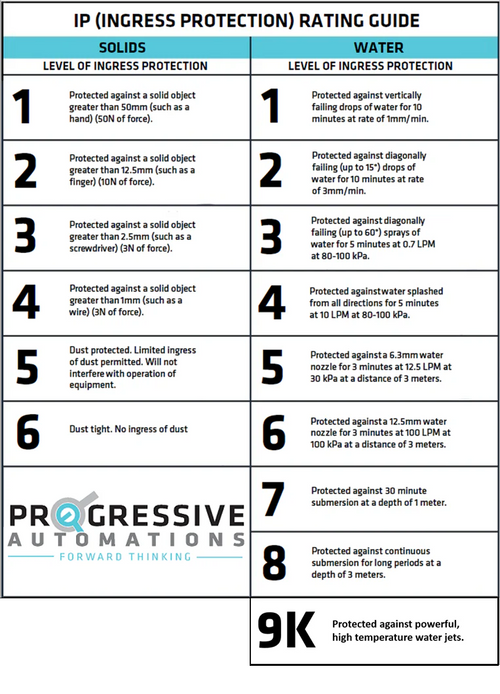
• IP‑bescherming
• Compatibiliteit
• Budget
1. IP‑bescherming: Beoordeel de specifieke omgevingsvereisten van uw toepassing om het type regelsystemen te bepalen dat nodig is. De PA-33‑besturingskast heeft bijvoorbeeld een IP‑klassificatie van IP65 voor stof- en waterbestendigheid. Voor regelsystemen die worden blootgesteld aan buitenelementen zoals regenwater, stof en vuil, wordt een IP‑klassificatie van IP65 of hoger aanbevolen. 2. Compatibiliteit: Zorg ervoor dat het regelsysteem compatibel is met de elektrische lineaire actuatoren die u hebt gekozen of momenteel gebruikt, om naadloze integratie te garanderen. Controleer of uw actuator de bijpassende communicatieprotocollen/positionele terugkoppeling heeft voor de controllers die u overwoog. Zo bieden de PA-12‑T (TTL/PWM) en PA-12‑R (RS‑485) Micro Precision Servo Actuator nauwkeurige positiebesturing met een positionele nauwkeurigheid tot 100 µm en vereisen ze geavanceerde communicatieprotocollen voor dergelijke prestaties. Houd er ook rekening mee of het type motor in uw actuator compatibel is met een regelsysteem. Continu werkende borstelloze motoren, zoals die in onze op maat bestelde PA-14‑actuatoren, vereisen besturingskasten die compatibel zijn met hun werking, zoals de LC-241‑besturingskast. Bekijk onze vergelijkings‑ en compatibiliteitstabellen voor besturingskasten via de onderstaande links om te zien welke van onze besturingskasten en actuatoren met elkaar compatibel zijn: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Overweeg of er budgetbeperkingen voor het project zijn en kies een regelsysteem dat de beste waarde voor uw investering biedt en tegelijkertijd aan uw prestatie‑eisen voldoet. Eenvoudige binnenprojecten die geen hoge precisie vereisen, kunnen bijvoorbeeld probleemloos werken door een basiswipschakelaar zonder hoge IP‑bescherming te bedraden om een 2‑draads mini‑lineaire actuator tegen een betaalbare prijs te bedienen.
• IP‑bescherming
• Compatibiliteit
• Budget
1. IP‑bescherming: Beoordeel de specifieke omgevingsvereisten van uw toepassing om het type regelsystemen te bepalen dat nodig is. De PA-33‑besturingskast heeft bijvoorbeeld een IP‑klassificatie van IP65 voor stof- en waterbestendigheid. Voor regelsystemen die worden blootgesteld aan buitenelementen zoals regenwater, stof en vuil, wordt een IP‑klassificatie van IP65 of hoger aanbevolen. 2. Compatibiliteit: Zorg ervoor dat het regelsysteem compatibel is met de elektrische lineaire actuatoren die u hebt gekozen of momenteel gebruikt, om naadloze integratie te garanderen. Controleer of uw actuator de bijpassende communicatieprotocollen/positionele terugkoppeling heeft voor de controllers die u overwoog. Zo bieden de PA-12‑T (TTL/PWM) en PA-12‑R (RS‑485) Micro Precision Servo Actuator nauwkeurige positiebesturing met een positionele nauwkeurigheid tot 100 µm en vereisen ze geavanceerde communicatieprotocollen voor dergelijke prestaties. Houd er ook rekening mee of het type motor in uw actuator compatibel is met een regelsysteem. Continu werkende borstelloze motoren, zoals die in onze op maat bestelde PA-14‑actuatoren, vereisen besturingskasten die compatibel zijn met hun werking, zoals de LC-241‑besturingskast. Bekijk onze vergelijkings‑ en compatibiliteitstabellen voor besturingskasten via de onderstaande links om te zien welke van onze besturingskasten en actuatoren met elkaar compatibel zijn: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Overweeg of er budgetbeperkingen voor het project zijn en kies een regelsysteem dat de beste waarde voor uw investering biedt en tegelijkertijd aan uw prestatie‑eisen voldoet. Eenvoudige binnenprojecten die geen hoge precisie vereisen, kunnen bijvoorbeeld probleemloos werken door een basiswipschakelaar zonder hoge IP‑bescherming te bedraden om een 2‑draads mini‑lineaire actuator tegen een betaalbare prijs te bedienen.

Besturingskasten van het Hall‑effect‑type
Besturingskasten zoals onze FLTCON‑serie bieden de mogelijkheid voor geprogrammeerde functies, veiligheidsvoorzieningen en andere gebruikersinstellingen die via de aangesloten afstandsbediening toegankelijk zijn. Wanneer meerdere actuatoren van het Hall‑effect‑type op een FLTCON‑besturingskast zijn aangesloten, zorgt de besturingskast voor synchronisatie van de motoren zodat ze samen met dezelfde snelheid bewegen.
Lees onze blog over toepassingen voor de FLTCON‑besturingskasten voor meer informatie.
Lees onze blog over toepassingen voor de FLTCON‑besturingskasten voor meer informatie.

Bij een configuratie met twee Hall-effect actuatoren accepteert onze FLTCON-2 een ingangsspanning van 110 VAC. We bieden echter ook de FLTCON-2-24 VDC aan, die een ingangsspanning van 24 VDC accepteert. In combinatie met onze draagbare FLT-accu PA-BT1-24-2200 (uitgang 24 VDC) biedt de FLTCON-2-24 VDC volledige draagbaarheid. We bieden een breed scala aan afstandsbedieningen, zodat u kunt genieten van alle unieke functies van onze verschillende programmeerbare bedrade afstandsbedieningen. Deze kunnen ook worden gebruikt in combinatie met onze draadloze RT-14 afstandsbedieningen voor extra gebruiksgemak.