
The PA-18 Track Linear Actuator je naš največji aktuator s fiksno dolžino in se pogosto uporablja v pohištvu po meri, domači avtomatizaciji in robotiki. Aktuator lahko preprosto upravljate z Arduino ploščo, v tem članku pa bomo pokazali, kako zgraditi in programirati z Arduinom krmiljen linearni aktuator, ki ga lahko zlahka prilagodite svoji aplikaciji!
Potrebna strojna oprema
Za z Arduinom krmiljen linearni aktuator potrebujete naslednje komponente, vse so na voljo pri Progressive Automations:
- 1x PA-18 Track Linear Actuator
- 1x Arduino Uno
- 1x MegaMoto Plus H-most
- 1x napajalnik 12 V DC
- 2x momentni tipki
- povezovalne žice (jumper)
Ožičenje sistema
Aktuator, uporabljen v tej postavitvi, zahteva vhodno napetost 12 V DC in do 8 A toka pri polni obremenitvi. Te vrednosti so precej višje, kot jih lahko zagotovi Arduino mikrokrmilnik, zaradi česar bo iz Arduina ušel »čarobni« dim. Da ne poškodujete Arduina, uporabite MegaMoto Plus H-most. H-most zlahka prenese zahteve po moči in ga je preprosto uporabiti za krmiljenje aktuatorja z Arduinom.
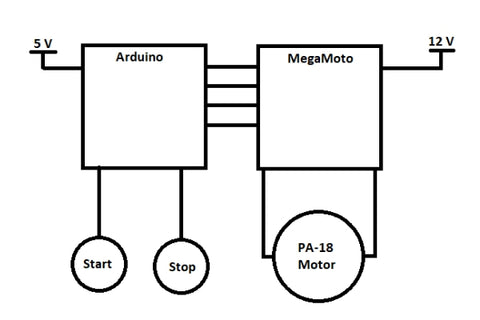
V tem sistemu so povezave z Arduina na MegaMoto Plus H-most in na dve tipki. Vsaka tipka zahteva en vhod, izbran iz razpoložljivih GPIO pinov na Arduinu. H-most ima štiri povezave z Arduinom: tri izhode in en vhod. Pini, ki jih uporablja H-most, so vnaprej določeni in jih ni mogoče spreminjati.
Blokovni diagram
Spodnji blokovni diagram na kratko pojasni zahteve po moči in povezave. Arduino deluje z 5 V napajanjem, H-most pa z 12 V. Če uporabljate dva ločena napajalnika, je pomembno, da delita maso, da se izognete plavajoči masi.
Arduino ukazi
Na namizni računalnik ali prenosnik morate namestiti Arduino IDE. Upoštevajte, da ožičenje vašega sistema vpliva na Arduino kodo, zato je pomembno, da dvakrat preverite povezave in jih primerjate z vneseno kodo.
Ukaz pinMode v Arduinu določa pine kot vhode ali izhode. Za spremembo signala, ki ga Arduino pošilja na določen pin, se uporabljata ukaza digitalWrite in analogWrite. Dodatno se ukaza digitalRead in analogRead uporabita, ko mora Arduino preveriti signal na določenem pinu.
V spodnjem programu ukaz digitalWrite omogoča ali onemogoča H-most ter konfigurira pine, uporabljene za tipke. Ukaz analogWrite nastavi vrednost PWM signala v območju od 0 do 255 za H-most. Ukaz digitalRead preveri, ali so tipke pritisnjene ali spuščene. Ukaz analogRead meri tok, ki ga porabi motor aktuatorja, kar potrdi, kdaj je aktuator na koncu svojega hoda.
Arduino koda
V nadaljevanju so opisane definicije programa, nastavitev, glavna zanka in funkcije tipk za z Arduinom krmiljen linearni aktuator. Pomembno je, da kodo pregledujete vrstico za vrstico, da razumete, kako deluje. To razumevanje vam omogoča prilagoditve glede na vašo aplikacijo.
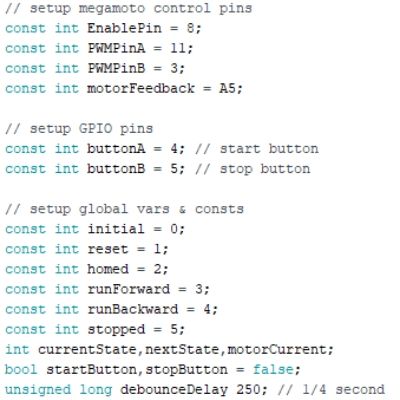
Definicije programa
Ta del kode nastavi povezave na pine. Dvakrat preverite, ali se vaše povezave na Arduino ploščo ujemajo z vnesenimi številkami. Te vrednosti lahko spremenite, če Arduinu dodajate dodatne komponente, kar lahko zahteva prerazporeditev pinov.
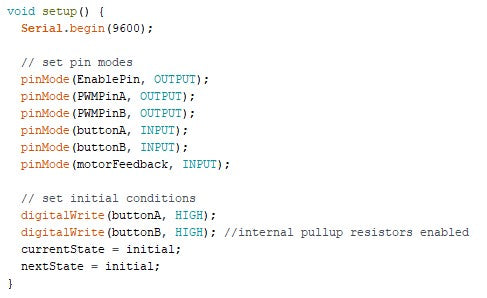
Nastavitev programa
Ta del kode konfigurira povezane pine kot vhod ali izhod. Obe tipki lahko nastavite na HIGH ali LOW, odvisno od povezave (pull-up ali pull-down). Čeprav ima Arduino interne pull-up upore, boste morda želeli dodati zunanji upor za odpravljanje odskokov stikal in preprečevanje napačnega proženja.
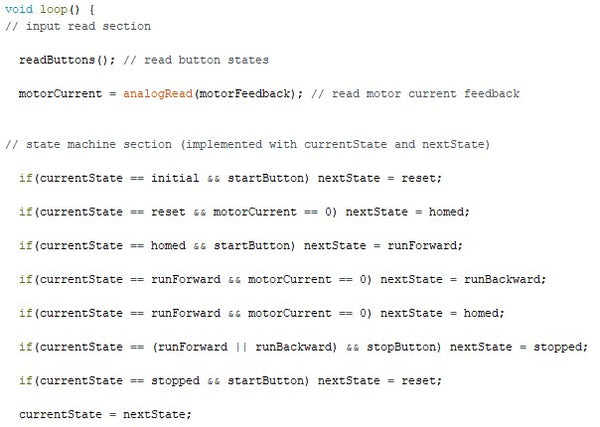
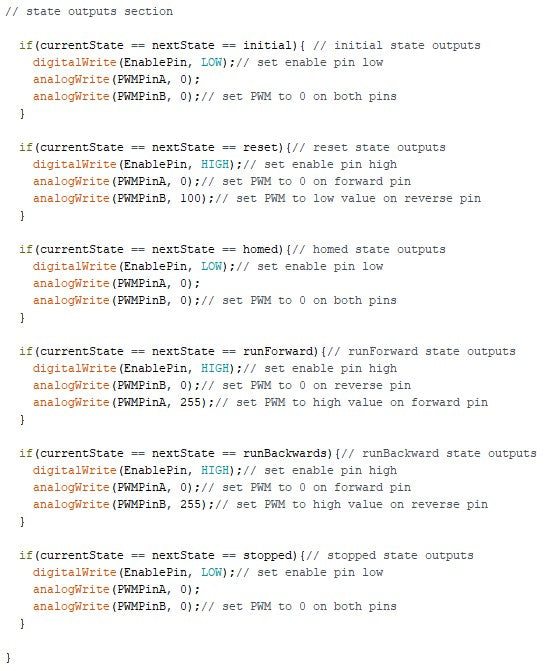
Glavna zanka
Glavna zanka nenehno preverja, ali so bile tipke pritisnjene, in glede na rezultat funkcije tipke zažene ustrezen del kode. Vključen je tudi del stroja stanj, ki določa, kaj počne z Arduinom krmiljen linearni aktuator in kako naj se odzove na vhodne signale (tj. tipke).
Funkcije tipk
Te funkcije digitalno berejo stanje tipk za krmiljenje aktuatorja z Arduinom. Vsaka funkcija tipke ima zanko za odpravljanje odskokov znotraj glavnega if stavka, da se prepreči napačno proženje in pošiljanje napačnih signalov Arduinu. Izhod teh funkcij je logična (Boolean) vrednost. Na primer, če pritisnete gumb za zagon, se vrednost startButton spremeni v true. Logična vrednost se nato v glavni zanki uporabi za nadaljnje odločitve.

Zaključek
Zmožnosti tega sistema presegajo to, kar je prikazano v tem članku. Arduino mikrokrmilnik in MegaMoto Plus H-most lahko uporabite za precej bolj zapletene krmilne rutine. Ta postavitev omogoča nadzor spremenljive hitrosti z uporabo ukaza analogWrite za nastavitev PWM signala. Tok motorja aktuatorja lahko nadzorujete za zaznavanje obremenitve in proženje dodatnih ukazov.
Poleg tega lahko za naprednejši z Arduinom krmiljen linearni aktuator priključite dodatne senzorje. Na primer, ultrazvočni senzor lahko zažene/ustavi motor, ko ste na določeni razdalji, ali pa sproži vrsto drugih zanimivih funkcij. Možnosti so neomejene. Če pa vam na Arduinu zmanjkuje pinov, lahko izberete drug model Arduina. Alternativno lahko več Arduinov vežete v verigo, da komunicirajo med seboj in z različnimi komponentami, vendar taka pot zahteva precej programerskih izkušenj.
Za dodatne informacije nam pišite na sales@progressiveautomations.com ali nas pokličite na 1-800-676-6123.