
- Introduktion til hvordan aktuatorer fungerer
- Positionsfeedbackmekanismer
- Typer af styresystemer til aktuatorer
- Feedback og fejlretning
- Styrebokse til lineære aktuatorer
Introduktion til hvordan aktuatorer fungerer
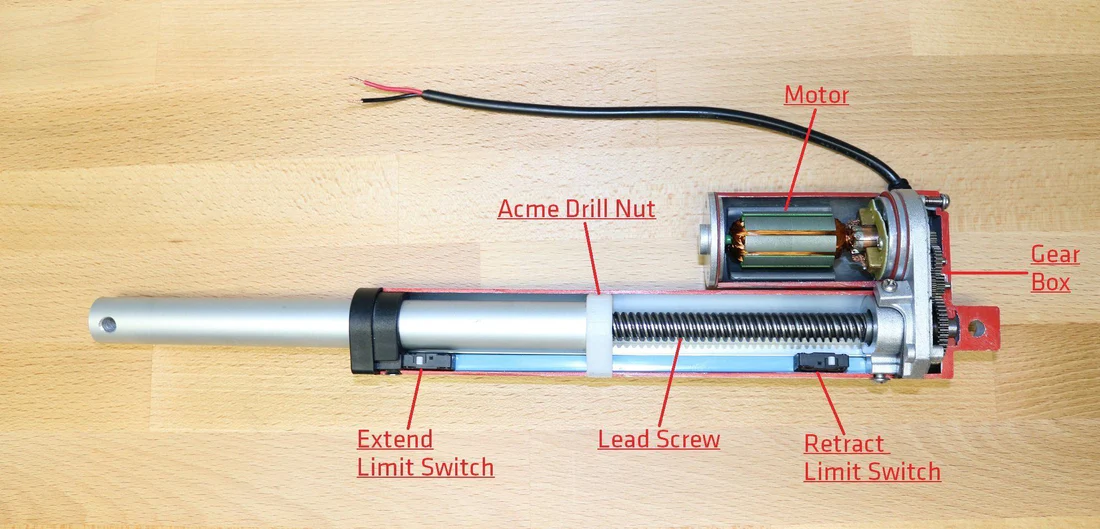
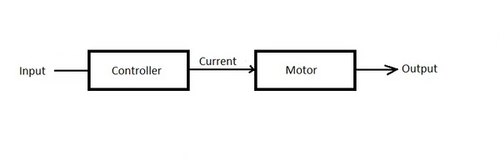
I elektriske lineære aktuatorer, elektrisk strøm bruges til at frembringe rotationsbevægelse i en elektrisk motor der er mekanisk forbundet med en gearkasse og bruger en lead
screw at cykle aktuatorens aksel, der er fastgjort til en ACME boremøtrik til lineær bevægelse. Styresystemer til aktuatorer har udviklet sig betydeligt gennem årene, hvilket har forbedret alsidigheden og funktionaliteten af disse enheder. Lineære aktuatorer kan betjenes via forskellige metoder og kontrolmekanismer, herunder:
• Trådløse controllere - giver brugerne bekvemmeligheden ved fjernbetjening uden behov for fysiske kabler.
• Wi-Fi- og Bluetooth-kompatible controllere - muliggør integration i smarte systemer og adgang via mobile enheder, hvilket giver brugervenlige grænseflader og mulighed for at justere indstillinger eksternt og præcist.
Disse fremskridt inden for aktuatorteknologi og styresystemer har udvidet deres anvendelsesområde og gjort dem uundværlige i moderne automatiserede systemer. Uanset om det drejer sig om justering af vinduer i køretøjer, der kører tungt landbrugsudstyr, eller automatisering af husholdningsapparater, aktuatorer er fortsat afgørende i at omsætte elektriske signaler til fysisk handling.

Forståelse af styresystemer til aktuatorer
Det primære formål med disse systemer er at sikre, at aktuatorer fungerer præcist, effektivt og pålideligt i henhold til foruddefinerede parametre. Betydningen af styresystemer i aktuatordrift kan ikke overvurderes, især når det kommer til at opnå præcis og effektiv bevægelseskontrol. Disse systemer er afgørende af flere årsager:
1. Præcision: Styresystemer muliggør finjustering af aktuatorbevægelser for at opnå høje niveauer af gentagelighed og nøjagtighed. Dette er afgørende i applikationer, hvor præcis positionering er kritisk, såsom i robotkirurgi eller luftfartsteknik.
2. Effektivitet: Ved at optimere den måde, aktuatorer reagerer på kommandoer, reducerer styresystemer energiforbruget og minimerer slitage. Dette forlænger ikke kun aktuatorens levetid, men forbedrer også den samlede effektivitet af det system, den opererer i.
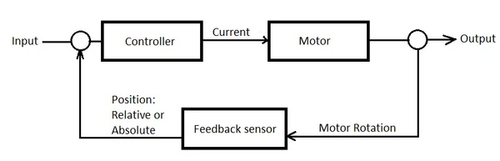
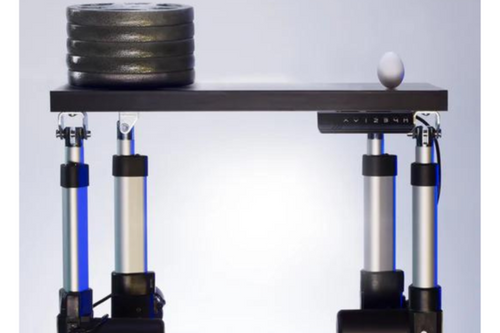
3. Tilpasningsevne: Feedbackmekanismer kan justere kompatible aktuatorers adfærd i realtid ved at analysere positionsfeedbacken fra kompatible aktuatorer. Denne tilpasningsevne er afgørende i dynamiske miljøer, hvor forholdene ændre sig hurtigt, f.eks. i automatiserede fremstillingsprocesser eller når flere aktuatorer oplever ulige vægtfordeling.
5. Sikkerhedsfunktioner: Programmerede sikkerhedsfunktioner såsom overbelastningsbeskyttelse hjælper med at forhindre skader på en aktuator eller applikationen ved at stoppe driften, efter at styreboksen har registreret et for højt elektrisk strømforbrug. En anden sikkerhedsfunktion i kontrolbokse inkluderer overophedningsbeskyttelse, der stopper driften efter en vis cyklustid for at sikre, at driften forbliver inden for en aktuators duty cycle-klassificeringer og dermed undgår motorudbrænding. Styresystemer er fundamentale for aktuatorers funktionalitet og giver den nødvendige intelligens og tilpasningsevne for at sikre præcision, effektivitet, sikkerhed og effektiv bevægelseskontrol. Deres rolle er afgørende i den voksende verden af automatiseringsteknologi, hvor bevægelsespræcision ofte er hjørnestenen i operationel succes.
Komponenter og typer af styresystemer
Nøglekomponenter i en grundlæggende kontrolboks
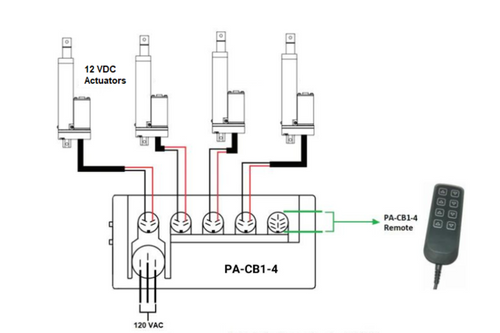
I en grundlæggende kontrolboks designet til elektriske lineære aktuatorer spiller hver komponent en afgørende rolle i at sikre effektiv drift. Her er en oversigt over disse hovedkomponenter, deres funktioner og de formål, de tjener:1. Relæer: Relæer fungerer som kontakter, der styrer det elektriske kredsløb med høj effekt ved hjælp af et laveffektsignal. For kontrolbokse designet til at styre 2-tråds aktuatorer er to relæer afgørende for at vende polariteten af den spænding, der påføres på tværs af aktuatorens to ledninger, hvilket igen ændrer bevægelsesretningen. Dette muliggør tovejsstyring i en simpel opsætning for at forlænge og trække aktuatoren tilbage.
2. Indgangskanaler: Indgangskanaler er grænseflader, hvorigennem styringen Systemet modtager elektriske signaler fra eksterne kilder såsom strømforsyninger eller signaler fra kabelforbundne fjernbetjeninger. Kontrolbokse, der fungerer med positionsfeedback, kan også modtage input fra sensorer på en aktuator. Disse kanaler behandler input fra brugeren og/eller sensorer for at bestemme, hvordan aktuatoren skal fungere, hvilket gør dem grundlæggende for at starte og styre aktuatorbevægelser baseret på specifikke krav.
3. Udgangskanaler: Udgangskanaler leverer styresignaler fra controlleren til aktuatoren eller andre komponenter som relæer. Kontrolbokse, der fungerer med positionsfeedback, kan også udsende elektrisk strøm, så sensorerne på en aktuator har strøm til at fungere. Disse kanaler er afgørende for at udføre de kommandoer, der bestemmes af styresystemet, hvilket direkte påvirker aktuatorens adfærd.
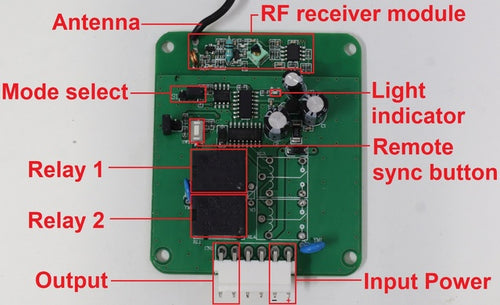
4. Fjernsynkroniseringsknap: Denne knap bruges til at synkronisere styresystemet med en fjernbetjeningsenhed. Den sikrer, at fjerninputtene genkendes og behandles af styresystemet, hvilket muliggør bekvem og fleksibel betjening på afstand.
5. Lysindikator: Lysindikatorer giver visuel feedback om systemets status. De kan være en indikator for tænd/sluk, driftstilstande, fejltilstande eller signalmodtagelse, hvilket hjælper med at overvåge og fejlfinde systemet uden behov for komplekse diagnostiske værktøjer.
6. Tilstandsvalg: Denne funktion giver brugeren mulighed for at skifte mellem forskellige driftstilstande på kontrolboksen, såsom momentane eller ikke-momentane kontroller. I momentan tilstand skal en fjernbetjeningsknap holdes konstant i den aktive position for at enheden kan fungere. Når du slipper kontakten, stopper enheden med at fungere. Ikke-momentan tilstand fungerer som en kontakt, der forbliver i sin sidst indstillede position, indtil den ændres igen, uanset om den trykkes ned. Det betyder, at når den er aktiveret, fortsætter enheden med at fungere, indtil kontakten manuelt slukkes.
7. Antenne: Antennen er en del af kontrolbokse, der har en trådløs kommunikationsopsætning. Antenner bruges til at forbedre signalrækkevidden og kvaliteten mellem kontrolsystemet og fjernbetjeningsenheder eller mellem sammenkoblede systemer. Det er afgørende for at opretholde robust kommunikation i miljøer, hvor direkte ledningsføring er upraktisk eller uønsket.
8. RF-modtagermodul: Dette modul modtager radiofrekvens Signaler sendt af trådløse fjernbetjeninger. Den afkoder disse signaler til handlingsrettede kommandoer, som styresystemet kan forstå og reagere på. RF-modtagermodulet er afgørende for trådløse styringsopsætninger, da det muliggør fjernbetjening af aktuatoren uden fysisk kontakt. Sammen danner disse komponenter et omfattende styresystem til 2-tråds aktuatorer, der hver især tjener en specifik funktion, der bidrager til den samlede effektivitet og produktivitet af aktuatorens drift. Dette system giver ikke kun mulighed for præcis kontrol over aktuatorens bevægelser, men forbedrer også brugergrænsefladen og interaktionen, hvilket gør det tilpasningsdygtigt til en bred vifte af applikationer.
Positionsfeedbackmekanismer
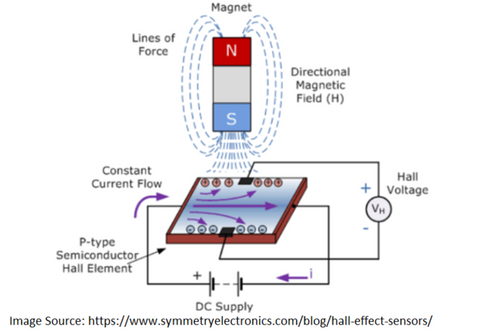
Hall-effektsensorer
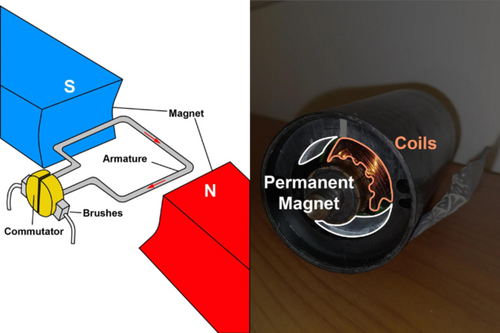
Edwin Hall (som opdagede Hall-effekten) hævdede, at når et magnetfelt påføres i en retning vinkelret på strømmen af elektrisk strøm i en leder, induceres en spændingsforskel. Denne spænding kan bruges til at detektere, om en Hall-effektsensor er i nærheden af en magnet.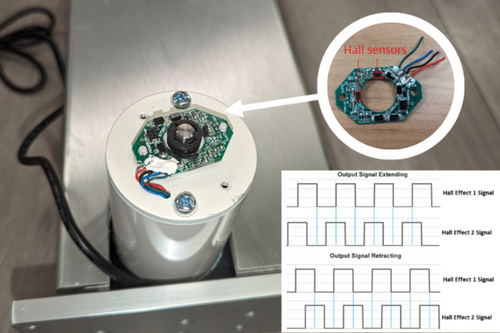
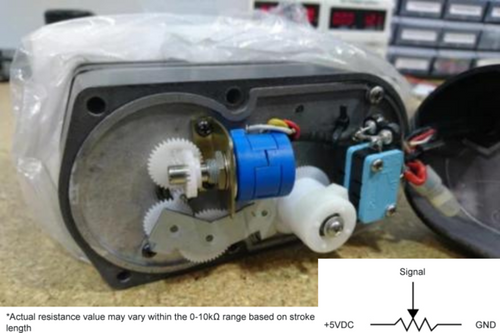
Potentiometre
Et potentiometer giver en variabel modstand, der er proportional med aktuatorens position. Der er ofte gear forbundet mellem potentiometerets knap og aktuatorens roterende motor. Når aktuatoren bevæger sig, ændres modstandsværdien, hvilket kan måles og konverteres til positionsdata. Denne information bruges derefter af et styresystem til at foretage finjusteringer af aktuatorens position, hvilket forbedrer nøjagtigheden.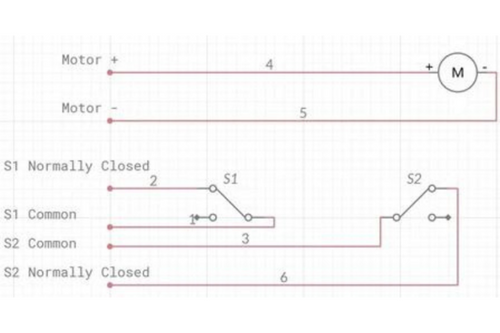
Tilbagemelding af grænsekontakt
Formålet med feedbacksignaler fra grænsekontakter er at give et system mulighed for at bestemme, om aktuatoren fysisk har udløst de interne grænsekontakter. Denne type feedback er enkel og nyttig til applikationer, der primært kun kræver information om, hvorvidt aktuatoren har nået den fuldt udstrakte eller fuldt tilbagetrukne position.Typer af styresystemer til aktuatorer
Et eksempel på et simpelt åbent sløjfesystem inkluderer en momentan vippekontakt, der er forbundet med en lineær aktuator. Dette kræver, at en operatør fysisk trykker på og holder kontakten nede, for at aktuatoren kan fortsætte med at cykle, og hvis kontakten slippes, før aktuatoren har nået enden af sin bevægelse, stopper aktuatoren midtvejs.
Valget af styresystem og dets komponenter har betydelig indflydelse på aktuatorernes funktionalitet og ydeevneoptimering. Ved at integrere effektive feedbackmekanismer og vælge den passende styresystemtype kan aktuatorer optimeres til en bred vifte af applikationer, hvilket sikrer både præcision og pålidelighed i deres drift.
Feedback og fejlretning
Variabler, som styresystemer korrigerer for
1. Position: Styresystemer hjælper med at sikre, at en aktuator når og opretholder den ønskede position nøjagtigt ved at sammenligne brugerens position med den faktiske positionsaflæsning fra positionsfeedbacksensorerne. Eksempler inkluderer, når brugere af stående skriveborde trykker på en controllers knap for at få aktuatorer til at bevæge sig til en bestemt forudindstillet hukommelsesposition for at justere deres arbejdsområde fra siddende til stående højde.
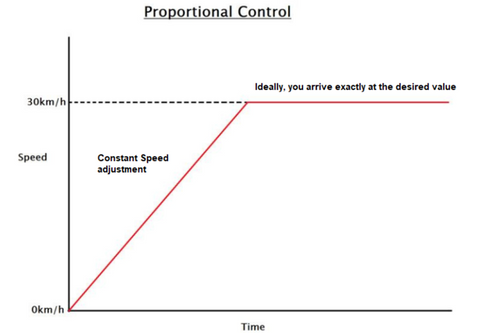
2. Hastighed: Aflæsning af positionsfeedback og dividering af den tilbagelagte afstand med, hvor meget tid der er gået, vil resultere i bevægelseshastigheden. Nogle styresystemer tillader justerbare hastighedsindstillinger via PWM (Pulse Width Modulation), hvilket gør det muligt for aktuatoren at bevæge sig med forskellige hastigheder baseret på applikationens krav. Dette er nyttigt i applikationer, hvor varierende hastigheder er nødvendige, f.eks. for aktuatorer, der styrer bevægelsen af flysimulatorer.
3. Kraft: Visse styresystemer kan regulere mængden af kraft, der udøves af aktuatorer, hvilket sikrer, at den fungerer inden for sikre grænser og forhindrer skader på systemet eller omgivende komponenter. Ved at måle det elektriske strømforbrug kan styresystemer omtrent måle, hvor meget kraft der udøves af lineære aktuatorer. Denne funktion er nyttig til lineære aktuatorer, der åbner og lukker vinduer for at slukke for strømmen og stoppe med at anvende kraft, hvis en persons hånd eller forhindring blokerer bevægelsesvejen.
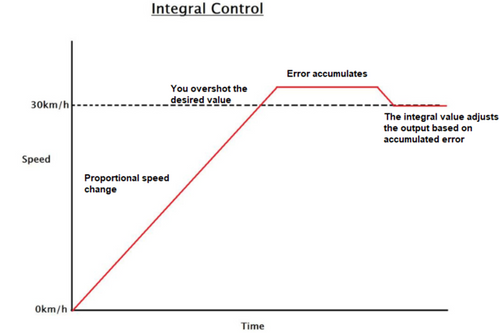
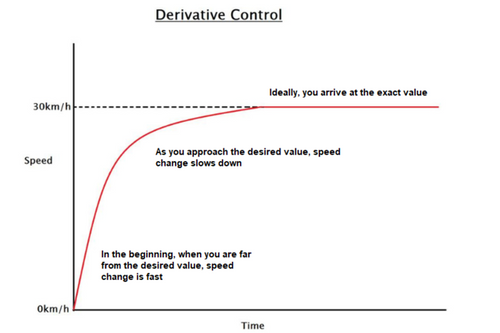
Typer af kontrolstrategier
Valg af det rigtige styresystem
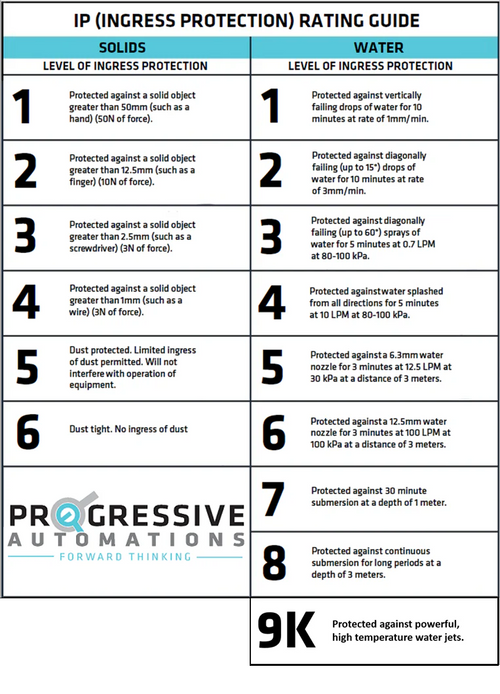
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Hall-effekt-kontrolbokse
Læs vores blog om applikationer til FLTCON-kontrolbokse for mere information.
