




DC-motorer bruges i vid udstrækning både i industrielle applikationer og i hjemmet til personlige projekter. En af de vigtigste overvejelser, når man vælger at bruge en DC-motor, er, om man skal tilslutte en eller anden form for feedback til motoren.
Hvad er feedback?
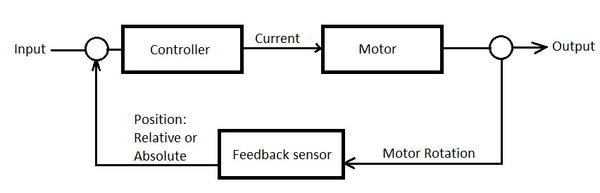
Feedback refererer til enhver information, som en regulator kan bruge til at overvåge en proces. I DC-motorer indsamles feedback normalt i form af position, antal rotationer og rotationsretning. Denne information kan derefter sendes til regulatoren for at måle motorakslens vinkelhastighed og position. Dette er almindeligvis kendt som en form for "closed-loop control".
I mere sofistikerede anvendelsesscenarier kan feedbacken fra motoren og andre kilder styres for ikke blot at opnå præcis hastighed og position, men også den ønskede dynamiske respons, synkronisering og stabilitet.
Fordele ved at bruge feedback
Når feedback implementeres korrekt, kan det gøre det muligt for maskineriet at fungere mere effektivt og med højere repeterbarhed. Feedback kan give din mekanisme mulighed for automatisk at justere outputtet for at opretholde stabilitet, reducere variationer og minimere fejl uden behov for menneskelig indblanding.
Et simpelt eksempel på et godt feedback-styringssystem er termostaten. Regulatoren måler temperaturen i rummet og justerer varmeelementernes effekt for at opretholde en indstillet temperatur.
En af de vigtigste fordele ved feedback, når det kommer til DC-motorer, er PID-styring. PID refererer til en styresløjfemekanisme, der er meget anvendt i industrien til automatisk at kompensere for fejl i maskinens hastighed eller position.
Feedback kan også bruges til at implementere sikkerhedsmekanismer og fejlfinde din applikation. For eksempel, hvis din lineære aktuatorer skal bevæge sig synkront, men den ene halter, er der noget galt. Systemet kan derefter stoppe bevægelsen af begge aktuatorer for at forhindre skader eller vipning.
Typer af feedbacksensorer til DC-motorer
De mest almindelige typer feedback til DC-motorer er potentiometre, hall-effektsensorer og encodere. Hvad angår præcision og nøjagtighed, kan alle 3 typer sammenlignes og er meget effektive med moderne teknologi. Forskellene opstår, når man tager hensyn til specifikke ydelseskrav såsom holdbarhed, miljøfaktorer, elektromagnetisk interferens og temperaturydelse.
Potentiometer
Den største fordel ved denne type feedback er dens enkelhed. Potentiometeret omdanner effektivt en almindelig DC-motor til en servomotor, hvilket muliggør præcis bevægelse og/eller hastighedskontrol. Potentiometre giver direkte information om motorakslens vinkelposition. Som et resultat, når systemet mister strøm, kan potentiometeret bevare sin positionsinformation uden behov for at "gå i hjem". Da potentiometre i kernen blot er spændingsdelere med en stor modstand, er de desuden gode til at håndtere elektromagnetisk interferens (EMI).
Der er også ulemper ved at bruge potentiometre. Potentiometersensorer kræver kontakt for at foretage målingerne, hvilket betyder, at de vil være mindre holdbare og have en begrænset levetid sammenlignet med andre former for feedback. Potentiometre er en relativt langsom måleform, både på grund af behovet for kontakt og fordi de muligvis skal bruge en analog-til-digital-konverter, før den faktiske feedbackkontrol er etableret. Endelig skaber potentiometre i motorer en begrænsning på antallet af rotationer, som en aksel kan foretage. Applikationer med potentiometre-feedback skal sikre, at der er en måde at forhindre overdreven bevægelse.
Hall-effekt
Hall-effektsensorer er en vigtig del af motorfeedback, fordi de er pålidelige, præcise og har en lang levetid. I modsætning til potentiometeret behøver Hall-effektsensorer ikke at have nogen kontakt, så de er nyttige i barske miljøer, meget modstandsdygtige over for slid og pålidelige i miljøer med høje stød. Hall-effektsensorer leverer elektriske impulser, når magneten er justeret med sensorelektronikken. Af denne grund er de velegnede til højhastighedsapplikationer og giver mulighed for at forprogrammere bestemte motorakselvinkler.
En af ulemperne ved Hall-effektsensorer er, at de kun kan give relativ positionsinformation. Det betyder, at hver gang systemet mister strøm, skal Hall-effektsensorerne flyttes til en kendt placering og nulstilles. Desuden kan ledninger til Hall-effektsensorer, der bærer information, være sårbare over for elektromagnetisk interferens og støj. Af denne grund kan signalerne nogle gange gå tabt, eller der kan genereres falske signaler, hvilket betyder, at positionsinformationen kan "drive" over tid.
Encoder
Der findes optiske og magnetiske encodere. Magnetiske encodere er sandsynligvis den bedste samlede sensor til generering af feedbacksignalerDe er kontaktløse, ligesom Hall-effektsensorer, hvilket betyder, at de har en meget lang levetid. De er meget hurtige og har typisk en meget høj opløsning. Magnetiske encodere påvirkes heller ikke af støv eller andre partikler og kan bruges i en række forskellige miljøer.
Encodere er typisk dyre og kræver dedikeret elektronik, som kan være svær at konfigurere og styre. Det er ikke altid en god idé at tilføje unødvendig kompleksitet til designet, da det også ville øge antallet af potentielle fejltilstande.
Der findes en række forskellige former for feedback til rådighed for designere, og med fremskridt inden for moderne teknologi kan de gøres nogenlunde ligeværdige med hensyn til nøjagtighed. Når man vælger typen af feedback, skal man overveje applikationens ydeevnebehov og forstå fordelene ved de teknologier, man arbejder med.