
Joskus haluat liikuttaa esinettä pidemmän matkan kuin toimilaitteen iskun pituus on. Tämän voi toteuttaa käyttämällä teleskooppista toimilaitetta tai hyödyntämällä mekaanisen vipuvoiman fysiikkaa. Yleisiä esimerkkejä ovat saksinostin tai se, mitä ystävämme Mike Senna, Wall-E-robotin luoja, teki DIY-kanakopin automaattisella ovenavaajallaan.
Mekaaninen vipuvoima
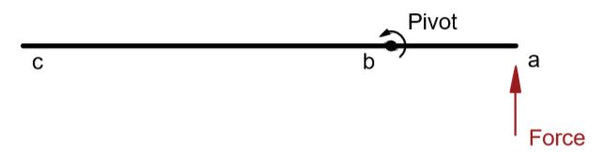
Näiden sovellusten taustalla oleva fysiikka perustuu etäisyyksien suhteeseen kääntöpisteestä (nivelen kohdalta) molemmin puolin. Kuten kuvasta 1 näkyy, toimilaite on asennettu pisteeseen ”a” ja kiinteä kääntö on pisteessä ”b”. Kun otat ”B”:n ja ”A”:n suhteen, saat suhdeluvun ”R”. Tämä tarkoittaa, että piste ”c” pyörii ”R”-kertaisesti verrattuna toimilaitteen iskuun. Tämä kuitenkin kasvattaa toimilaitteen vaadittavaa voimaa ja pisteen ”c” pyörimisnopeutta ”R”-kertaiseksi. Tämä on periaate siitä, miten hyödyntää lineaarista toimilaitetta iskun pituuden ja kiinnityspaikan perusteella.
DIY-kanakopin automaattinen ovenavaaja
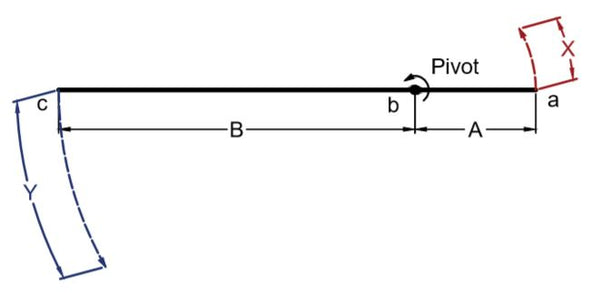
Mike Sennan ratkaisu hyödyntää samaa yllä kuvattua periaatetta ja on erinomainen esimerkki toisen varren lisäämisestä, jolla pisteen ”c” kiertoliike muunnetaan lineaariseksi liikkeeksi. Kuvasta 2 näkyy, että ylempi varsi pyörii kääntöpisteen ympäri ja toimilaite työntää pisteessä ”a”.
Kuva 2: Ylempi varsi pyörii kääntöpisteen ympäri pisteessä b
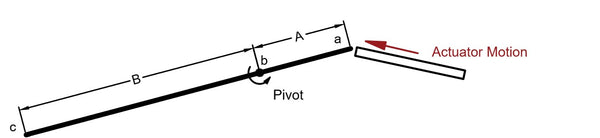
Mike tiesi tarvitsevansa kanakopin oven aukeavan noin 18 in tuumaa. Saadakseen suhdeluvun ”R” kolmeksi – jotta piste ”c” kulkisi 18 in tuumaa 6 tuuman iskulla – hän sijoitti kääntöpisteen 3/4 kohti pistettä ”a” (kuva 3). Mike toteutti tämän asettamalla varren niin, että kääntöpisteen toiselle puolelle jäi 3.5 in tuumaa ja toiselle puolelle 10.5 in tuumaa (3.5 in tuumaa × 3).
Kuva 3: Ylempi varsi pyörii kääntöpisteen ympäri pisteessä b mittoineen
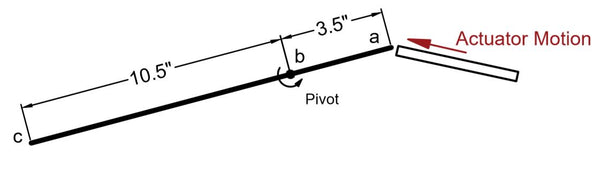
Tämän jälkeen Mike lisäsi toisen varren muuntamaan pyörimisliikkeen lineaariseksi liikkeeksi. Hän selittää: ”Ratkaisuni oli lisätä toinen varsi, jonka tarkoitus on kompensoida kaarta, kun toinen pää liikkuu kaarta pitkin ja toinen pää mukautuu lineaariseen liikkeeseen.” Kuva 4 on kaavio hänen DIY-kanakopin automaattinen ovenavaaja -projektistaan eri kohdissa liikerataa. Huomaa, että oven nopeus ja toimilaitteen tuottama voima vaihtelevat liikkeen aikana. Kyse oli nyt asennon hienosäädöstä halutun oven liikkeen saavuttamiseksi.
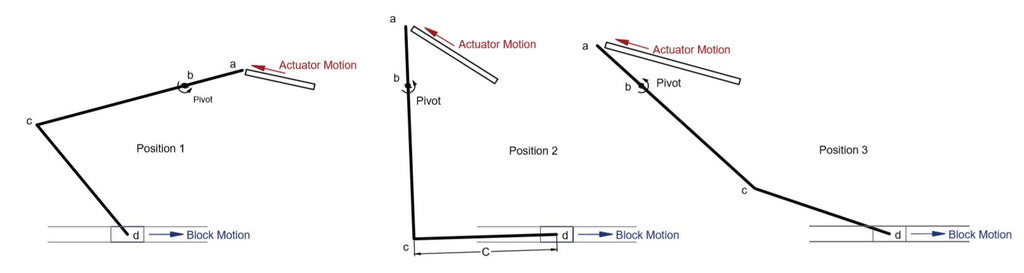
Kuva 4: Kanakopin ovi kolmessa eri asennossa
Saksinostin
Saksinostin on toinen sovellus, jossa tätä periaatetta hyödynnetään pidemmän lineaarisen liikkeen saavuttamiseksi mekaanisella vipuvoimalla. Esimerkin antamiseksi siitä, miten lineaarista toimilaitetta voi hyödyntää, luotiin 3D-malli saksinostimesta, jossa toimilaitteen suhteellisen lyhyt liike simuloi alustan suurempaa liikettä.
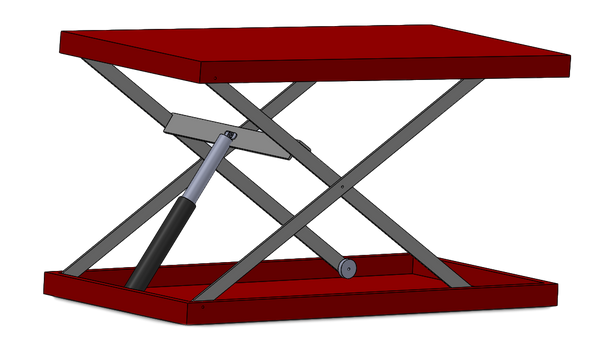
Kuva 5: Yksivaiheisen saksinostimen 3D-malli
Kuten kuvasta 5 näkyy, saksinostimessa käytettiin toimilaitetta, jossa on suhteellisen lyhyt isku (8 in tuumaa tässä tapauksessa), ja sillä nostettiin 36 in tuuman korkeuteen. Saksinostimet perustuvat samaan periaatteeseen, jossa kappale pyörii kääntöpisteen ympäri ja mekaaninen etu syntyy. Sen sijaan, että lisättäisiin toinen jäsen pelkästään toisen pään pyörimisliikkeen kääntämiseksi, jäsenten päiden liike rajoitetaan vaakasuuntaiseksi. Tällöin voiman suunta on pelkästään ylöspäin.
Mielenkiintoista saksinostimessa on, että jos toimilaite asennetaan ylemmälle puolikkaalle, nosto nousee toimilaitteen pidentyessä. Jos toimilaite asennetaan alemmalle puolikkaalle, nosto nousee toimilaitteen vetäytyessä. Huomaa myös, että mitä lähempänä toimilaite on jäsenten keskiniveltä, sitä enemmän nosto nousee – mutta toimilaite tarvitsee enemmän voimaa.
Jos etsit tapoja hyödyntää lineaarista toimilaitetta liikuttamaan kohdetta pidemmän matkan, teleskooppinen toimilaite tai DIY‑saksinostinmekanismi on toimiva ratkaisu. Saksinostimeen tai ovimekanismiin Progressive Automationsilta löytyy useita malleja eri iskuilla ja voimilla, jotta löydät kaikkiin DIY‑tarpeisiisi sopivan.