
Tasavirtamoottoreita käytetään laajalti sekä teollisuudessa että kotona omissa projekteissa. Yksi tärkeimmistä kysymyksistä DC‑moottoria valittaessa on, liitetäänkö moottoriin jokin palaute.
Mitä palaute on?
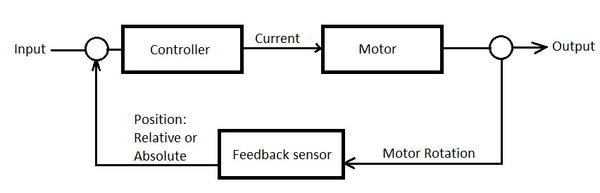
Palaute tarkoittaa kaikkea sellaista tietoa, jota ohjain voi käyttää prosessin valvontaan. Tasavirtamoottoreissa palaute kerätään yleensä sijaintina, kierroslukuna ja pyörimissuuntana. Nämä tiedot voidaan sitten välittää ohjaimelle moottorin akselin kulmanopeuden ja sijainnin mittaamiseksi – tätä kutsutaan yleisesti suljetuksi säätöpiiriksi.
Kehittyneemmissä käyttökohteissa moottorista ja muista lähteistä tulevaa palautetta voidaan hallita niin, että saavutetaan paitsi tarkka nopeus ja sijainti myös haluttu dynaaminen vaste, synkronointi ja vakaus.
Palautteen käytön edut
Oikein toteutettuna palaute voi mahdollistaa koneiston tehokkaamman ja toistettavamman toiminnan. Palaute voi antaa mekanismin automaattisesti säätää ulostuloa vakauden ylläpitämiseksi, vaihtelun pienentämiseksi ja virheiden minimoimiseksi ilman ihmisen puuttumista.
Yksinkertainen esimerkki hyvästä palautesäätöjärjestelmästä on termostaatti. Ohjain mittaa huoneen lämpötilan ja säätää lämmityselementtien tehoa ylläpitääkseen asetetun lämpötilan.
Yksi palautteen keskeisistä eduista tasavirtamoottoreissa on PID‑säätö. PID viittaa teollisuudessa laajasti käytettyyn säätöpiiritapaan, joka kompensoi automaattisesti nopeuden tai sijainnin virheitä koneessa.
Palautea voidaan käyttää myös vikaturvallisten mekanismien toteuttamiseen ja sovelluksen vianmääritykseen. Jos esimerkiksi lineaaristen toimilaitteiden tulisi liikkua synkronissa, mutta yksi laahaa perässä, jokin on vialla. Tällöin järjestelmä voi pysäyttää molempien toimilaitteiden liikkeen vaurioiden tai kallistumisen estämiseksi.
Palautetunnistinten tyypit tasavirtamoottoreille
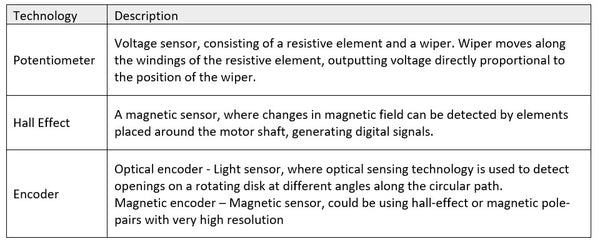
Yleisimmät palautteen muodot tasavirtamoottoreille ovat potentiometrit, Hall‑efektianturit ja enkooderit. Tarkkuuden ja täsmällisyyden osalta kaikki kolme tyyppiä voivat olla vertailukelpoisia ja erittäin tehokkaita modernilla teknologialla. Erot tulevat esiin, kun huomioidaan tietyt suorituskykyvaatimukset, kuten kestävyys, ympäristötekijät, sähkömagneettiset häiriöt ja lämpötila‑alueen käyttäytyminen.
Potentiometri
Tämän palautetyypin suurin etu on yksinkertaisuus. Potentiometri muuttaa käytännössä tavallisen tasavirtamoottorin servomoottoriksi, mikä mahdollistaa tarkan liikkeen ja/tai nopeuden säädön. Potentiometrit antavat suoraan moottorin akselin kulmasijaintitiedon. Näin ollen, kun järjestelmä menettää virran, potentiometri voi säilyttää sijaintitietonsa ilman, että sitä tarvitsee "ajataa kotiin". Lisäksi koska potentiometrit ovat pohjimmiltaan vain jännitejakajia, joissa on suuri vastus, ne sietävät hyvin sähkömagneettisia häiriöitä (EMI).
Potentiometrien käytössä on myös haittoja. Potentiometrianturit vaativat kontaktin mittausten tekemiseksi, mikä tarkoittaa, että ne ovat muita palautemuotoja vähemmän kestäviä ja elinkaareltaan rajallisempia. Potentiometrit ovat suhteellisen hidas mittaustapa sekä kontaktitarpeen vuoksi että siksi, että ne saattavat vaatia AD‑muuntimen ennen varsinaisen palautesäädön toteuttamista. Lopuksi potentiometrit rajoittavat moottoreissa akselin sallittujen kierrosten määrää. Sovelluksissa, joissa käytetään potentiometripalautetta, on varmistettava, että liiallinen liike estetään jollain tavalla.
Hall‑efekti
Hall‑efektianturit ovat moottoripalautteen peruspilari, sillä ne ovat luotettavia, tarkkoja ja pitkäikäisiä. Toisin kuin potentiometri, Hall‑efektianturit eivät tarvitse kontaktia, joten ne soveltuvat koviin olosuhteisiin, kestävät hyvin kulumista ja ovat luotettavia voimakkaissa iskuissa. Hall‑efektianturit tuottavat sähköisiä pulsseja, kun magneetti on linjassa anturielektroniikan kanssa. Tämän vuoksi ne sopivat suurinopeisiin käyttökohteisiin ja mahdollistavat tiettyjen moottorin akselikulmien esiohjelmoinnin.
Hall‑efektiantureiden haittapuolena on, että ne antavat vain suhteellista sijaintitietoa. Tämä tarkoittaa, että aina kun järjestelmä menettää virran, Hall‑efektianturit on siirrettävä tunnettuun kohtaan ja nollattava. Lisäksi tietoa siirtävät Hall‑efektianturien johdot voivat olla herkkiä sähkömagneettisille häiriöille ja kohinalle. Tämän takia signaaleja voi joskus kadota tai syntyä vääriä pulsseja, jolloin sijaintitieto voi ajan myötä "ajautua".
Enkooderit
Enkoodereita on optisia ja magneettisia. Magneettiset enkooderit ovat todennäköisesti paras yleisanturi palautesignaalien tuottamiseen. Ne ovat kosketuksettomia, kuten Hall‑efektianturitkin, mikä antaa erittäin pitkän käyttöiän. Ne ovat hyvin nopeita ja tyypillisesti erittäin tarkkoja (korkea resoluutio). Magneettiset enkooderit eivät myöskään ole herkkiä pölylle tai muille hiukkasille ja niitä voidaan käyttää monenlaisissa ympäristöissä.
Enkooderit ovat tyypillisesti kalliita ja vaativat omat elektroniikkansa, joiden käyttöönotto ja hallinta voi olla hankalaa. Tarpeettoman monimutkaisuuden lisääminen suunnitteluun ei aina ole hyvä idea, sillä se kasvattaa myös mahdollisten vikamuotojen määrää.
Suunnittelijoilla on käytettävissä monenlaisia palautemuotoja, ja modernin teknologian ansiosta ne voidaan tehdä karkeasti ottaen yhtä tarkkoiksi. Palautetyyppiä valittaessa on huomioitava sovelluksen suorituskykytarpeet ja ymmärrettävä käytettävien teknologioiden hyödyt.