















We have data sheets, user manuals, 3D models, wiring diagrams and more in our Resources and Learning Center sections.

Kyllä, L-muotoinen seisomapöytä on suunnan suhteen joustava ja voidaan asentaa toiveidesi mukaan. Tässä on vaiheittainen artikkeli, joka selittää, miten tämä on mahdollista: FLT-05-käyttöohje
HUOM: Alla olevat vaiheet voivat vaihdella sen mukaan, mikä kaukosäädinmalli sinulla on. Seuraavat ohjeet on tehty vakio RT-11 -kaukosäätimelle. Asettaaksesi rungon enimmäiskorkeuden siirry haluamaasi korkeuteen ja seuraa alla olevia vaiheita:
- Paina M ja näet näytössä [5 -]
- Paina UP-painiketta ja huomaat, että [5 -] vilkkuu
- Pidä M-painiketta pohjassa, kunnes näytössä näkyy [999]
- Enimmäiskorkeus on nyt asetettu
Asettaaksesi rungon vähimmäiskorkeuden siirry haluamaasi korkeuteen ja seuraa alla olevia vaiheita:
- Paina M ja näet näytössä [5 -]
- Paina DOWN-painiketta ja huomaat, että [5 -] vilkkuu
- Pidä M-painiketta pohjassa, kunnes näytössä näkyy [000]
- Vähimmäiskorkeus on nyt asetettu
Palauttaaksesi rajat, toimi seuraavasti:
- Paina M, kunnes näytössä näkyy [5 -], ja vapauta
- Pidä M pohjassa, kunnes näet [555]
- Rajat on nollattu
HUOM: Alla olevat vaiheet voivat vaihdella sen mukaan, mikä kaukosäädin sinulla on. Seuraavat ohjeet on tehty vakio RT-11 -kaukosäätimelle.
Jos sinun täytyy pitää kaukosäätimen painikkeita pohjassa päästäksesi esiasetettuun korkeuteen, ohjainrasiasi toimii hetkellisessä ohjauksessa (momentary). Vaihtaaksesi kaukosäätimen pysyvään tilaan (non-momentary), toimi näin
- Varmista, ettei pöytäsi alla ole mitään, koska meidän on aloitettava nollausmenettely
- Paina ja pidä DOWN-painiketta, kunnes näytössä näkyy [ASr]
- Kun [ASr] näkyy, paina ja pidä [1]; voit nähdä kaksi arvoa:
a. 10.1 = Non-momentary Mode
b. 10.2 = Momentary Mode
- Viimeistele nollausmenettely pitämällä DOWN-painiketta, kunnes seisomapöytäsi laskeutuu hieman ja nousee takaisin.
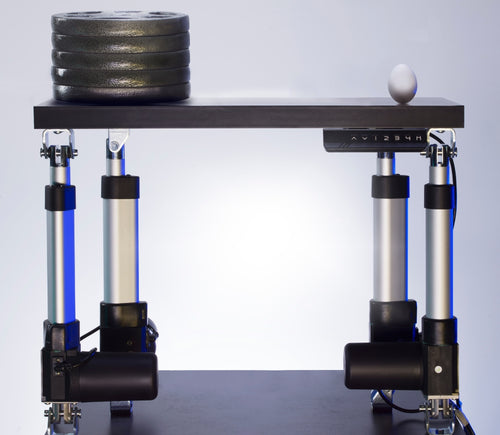
Seisomapöydissämme on 3 asetusta törmäyksen tunnistukselle, ja sen voi asettaa mieltymystesi mukaan. Jatka seuraavasti:
- Varmista, ettei pöytäsi alla ole mitään, koska meidän on aloitettava nollausmenettely
- Paina ja pidä DOWN-painiketta, kunnes näytössä näkyy [ASr]
- Kun [ASr] näkyy, paina ja pidä UP- [ ^ ] -painiketta; voit nähdä kolme arvoa:
a. 10.5 = 11 lbs
b. 10.6 = 22 lbs
c. 10.7 = 33 lbs
- Viimeistele nollausmenettely pitämällä DOWN-painiketta, kunnes seisomapöytäsi laskeutuu hieman ja nousee takaisin.
Tässä on joitakin vianmääritysvaiheita, jos näet minkä tahansa seuraavista virhekoodeista FLTCON-sarjan ohjainrasioilla varustetuissa rungoissa:
Tarkista virhekoodi täällä.
Jos kokemasi ongelma jatkuu näiden vaiheiden jälkeen, ota rohkeasti yhteyttä teknisiin tuoteinsinööreihimme numeroon 1-800-676-6123 tai lähetä meille sähköpostia osoitteeseen sales@progressiveautomations.com.