Automatiserte rovere er en avansert, men spennende teknologi for å lære om naboplanetene våre. Å bygge en rover for Mars kan være en utfordrende oppgave for ethvert team, spesielt i møte med global usikkerhet som pandemien. Fra problemer i forsyningskjeden og forsinkede forsendelser til begrenset kommunikasjon og begrenset personlig teaminteraksjon, lag-DJS Antariksh har bevist at de kan lage en svært vellykket Mars-rover samtidig som de takler enhver utfordring de møter! Hvis du var interessert i den europeiske Mars-roverutfordringen eller har en lidenskap for autonome rovere, er dette artikkelen for deg! Vi vil dekke reisen til team DJS Antariksh med å bringe Mars-roveren sin til live ved hjelp av elektrisk lineær aktuatorer for den europeiske Marsrover-utfordringen!
Vi introduserer Team DJS Antariksh

Team DJS Antariksh består av studenter på bachelornivå fra ulike ingeniørfag og er det offisielle Mars Rover-teamet ved Dwarkadas J. Sanghvi College of Engineering i Mumbai, India. For å vise frem sin lidenskap for romfart og robotikkindustrien, jobber de sammen om å bygge Roveren sin, samtidig som de konkurrerer i ulike Mars Rover-utfordringer.
I debutåret sitt fikk teamet tredjeplassen på verdensbasis og vant prisen for beste vitenskapsplanlegging i 2020. For European Rover Challenge (ERC) 2021 Remote vant DJS Antariksh førsteplassen på verdensbasis sammen med prisene for beste vitenskap og beste navigasjon. Deres offisielle Mars Rover-design - «Abhigyaan» - vant tredjeplassen i International Rover Design Challenge (IRDC) 2022, og var den Vinner av 1. plass av European Rover Challenge 2022 (REMOTE-formel).
Team DJS Antariksh har som mål å fortsette fremover med momentum i forberedelsene til International Rover Challenge 2023. Til tross for at de kommer fra en av de hardest rammede byene av pandemien, fortsetter team DJS Antariksh å tyde det utenkelige og strebe etter fortreffelighet.
Planlegging og design for Roveren

Ikke lenge etter at teammedlemmene ble grunnlagt for DJS Antariksh, var hele teamets stat i lockdown på grunn av pandemien i 2020. På dette tidspunktet oppmuntret alle på fakultetene sine teamet til å gi sitt beste, og om noe, i det minste tilegne seg så mye erfaring og kunnskap som mulig. Selv om teamet ikke hadde noen forkunnskaper eller erfaring med å jobbe med en Mars-rover, gjorde de så mye arbeid på nett som de kunne, som research, design, idémyldring og risikoanalyse for Mars-roveren sin. De fem underavdelingene i teamet og deres roller er listet opp nedenfor:
- Kodeavdeling: jobber med algoritmer for generelle roveroperasjoner og effektiv objektdeteksjon.
- Markedsavdeling: ansvarlig for fullstendig teamledelse og økonomisk kontakt.
- Mekanisk avdeling: håndterer design, produksjon og testing av roverens struktur.
- Elektronikkavdeling: ansvarlig for utvikling og integrering av roverens elektroniske systemer.
- Vitenskapsavdeling: utarbeide hypoteser som kan testes på landingsstedet ved å studere Mars' geologiske historie.
Teamet konkurrerte også i så mange virtuelle Mars Rover-utfordringer som de kunne mens prosjektet deres fortsatt pågikk. Se hele videoen av team DJS Antariksh nedenfor:
Den ideelle teamsamhandlingen og essensen av møter utenfor nettet var ikke mulig på grunn av at de var begrenset til møter på nettet under pandemien. Mange organisasjoner ble påvirket av pandemien, noe som resulterte i mangel på forsyninger og forsinkelser i når komponenter var tilgjengelige. Teamet gjorde imidlertid sitt beste med arbeidet på nettet, samtidig som de samlet inn midler til prosjektet sitt, og klarte å anskaffe sine første komponenter halvannet år senere.
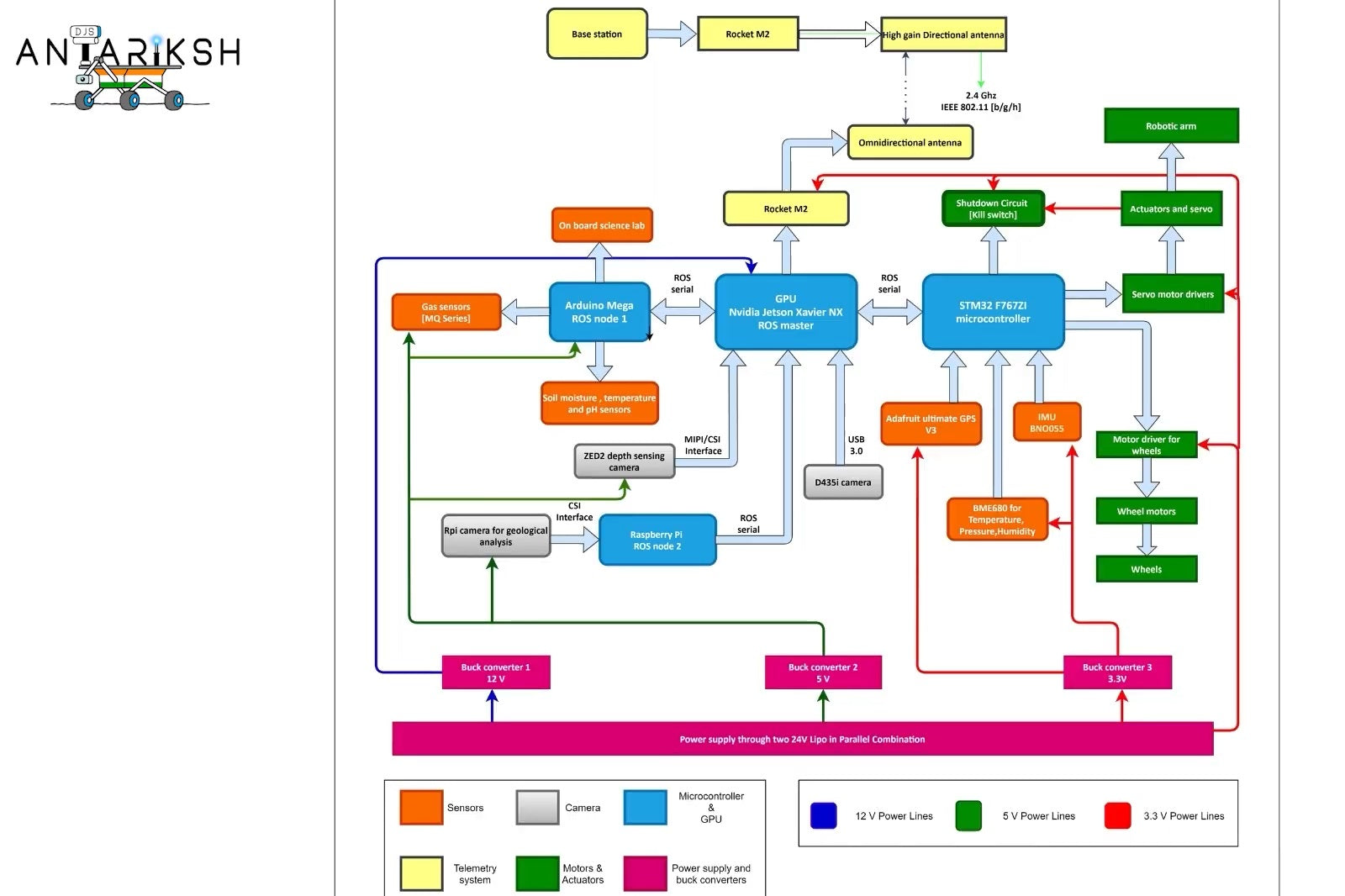
Gjennom programvare som HiRISE og JMARS samlet teamet inn data om de geologiske egenskapene til Mars for å utvikle et vitenskapelig oppdrag. Alt fra grunnleggende delsystemer til kompliserte delsystemer i robotarmen deres ble designet og senere bygget fra bunnen av av teamet. Proteus design suite-programvaren ble brukt til simulering av alle kretsene, mens teamet designet sitt robuste PCB på industrinivå gjennom Altium Designer.

Produksjon av Mars-roveren

Etter at statens pandemirestriksjoner ble lettet, kunne teamet endelig møtes personlig for å utføre offline-oppgaver, som å designe, planlegge og produsere Mars-roveren sin. Under pandemien og de tidlige planleggingsfasene ble visse aspekter av Mars-roveren deres designet med ideen om å bruke teknologier som senere viste seg å være utilgjengelige for teamet å kjøpe. På grunn av begrensninger i tilgjengelighet og ledetid for visse prosjektkomponenter, måtte teamet strategisk planlegge for komponentene de skulle bestille i midten av 2021.

Da de skulle ferdigstille de nyere komponentene som skulle brukes på Mars-roveren, var det nødvendig å sørge for at disse komponentene var tilgjengelige på markedet for teamet å kjøpe og jobbe med. Dette resulterte i at produksjonsprosessen for Mars-roveren ble utsatt mot slutten av 2021 og begynnelsen av 2022 etter at teamet hadde lagt planene sine for ressursene de kunne jobbe med. I noen tilfeller måtte teamet redesigne visse delsystemer og gjøre improvisasjoner underveis. Dette var slik at de kunne oppfylle kompatibilitetskravene for komponentene de klarte å skaffe. Teamet startet opprinnelig med langsom produksjon, da dette var første gang de produserte, samtidig som de hadde svært begrenset teknologi og finansiering å jobbe med.

Teamet sørget for at prosjektet deres var på rett vei gjennom diskusjoner med fakultetet, seniorene og bransjeeksperter for å bekrefte at alt som ble kjøpt og maskinert til delene deres, ville være egnet for det de prøvde å oppnå. Etter å ha hatt flere diskusjoner med ekspertene, klarte teamet å redusere eventuelle forsinkelser som kunne oppstå i det neste året. Støtte fra partnerskap og sponsorer spilte en avgjørende rolle i teamets prosjekt og finansieringen av det. Festemidler i rustfritt stål fra Sunrise Multi Tech Fasteners Pvt. Ltd. og verkstedverktøy fra Samsan-verktøy ble brukt av teamet til å bygge Mars-roveren sin. Teamet mottok også sitt spesialtrykte kretskort fra PCB-kraftmarkedet i India.

Sjekk ut videoen nedenfor for å lære mer om fjernarbeid for robotprosjekter:
Bruk av lineære aktuatorer i Mars Rover Challenge

Vår PA-14P-8-150 og PA-14P-4-150 elektrisk lineære aktuatorer brukes til å drive roverens robotarm slik at den har seks frihetsgrader (6DOF). Ved å integrere våre PA-14P tilbakekoblingslineære aktuatorer kan posisjonsinformasjon leses gjennom tilbakemeldingssignaler fra aktuatorens innebygde potensiometre. Posisjonsinformasjon gjør det mulig for et system å avgjøre om aktuatorene har nådd de nødvendige posisjonene for å minimere feil og gi høy nøyaktighet. I tillegg til dette hadde disse elektromotordrevne aktuatorene også en kompakt størrelse og lett design for å bidra til å holde den lave massen til den totale Mars-roveren.

«Roverens manipuleringsenhet er en 6DOF robotarm ledsaget av en 2-finger griper. Armen består av to lineære og fire roterende aktuatorer plassert i posisjoner som gir bedre lastfordeling og effektivitet. 2-finger griperen er motorbasert som driver og kontrollerer den kinematiske griperenheten og bevegelsen til kjevene.» – Rutwik Bhangale
For flere videoer av DJs Antariksh, sjekk ut deres YouTube-kanal og siste opplasting nedenfor:
I SAMMENDRAG
Gjennom samarbeid, utholdenhet og urokkelig engasjement har team DJS Antariksh overvunnet alle utfordringer de har møtt for å bringe en svært vellykket Mars-rover til live. For flere oppdateringer på lag-DJS Antariksh og deres fremtidige Mars Rover-utfordringer, følg dem gjerne videre Instagram, Facebook, Twitter, og LinkedIn!
Takk til teamet DJS Antariksh for at dere deler prosjektet deres og er en inspirasjon for alle! Vi ønsker dere alt godt i konkurransen i International Rover Challenge 2023!
Hvis du har noen tilpassede prosjekter, applikasjoner eller tekniske spørsmål om våre elektriske lineære aktuatorer, er du velkommen til å kontakte oss når som helst. Vi er eksperter på det vi gjør og hjelper deg gjerne med dine fremtidige tilpassede prosjekter!
sales@progressiveautomations.com | 1-800-676-6123