Efficiëntie, duurzaamheid en precisie in een compacte vormfactor zijn vaak zeer gewilde eigenschappen van elektrische lineaire actuatoren voor gebruik in diverse sectoren en toepassingen met beperkte ruimte. Door de juiste micro- en mini-actuatoren te kiezen, kunnen ruimte-kritische toepassingen profiteren van voordelen zoals precieze bediening, gebruiksgemak en prestatie-optimalisatie.
Deze pagina is gewijd aan het begrijpen van de basisprincipes van micro- en mini-actuatoren, de voordelen die ze bieden, ons modellenassortiment, cruciale specificaties en hoe u de beste kiest voor de behoeften van uw specifieke toepassing.
Wat zijn micro- en mini-elektrische lineaire actuatoren?
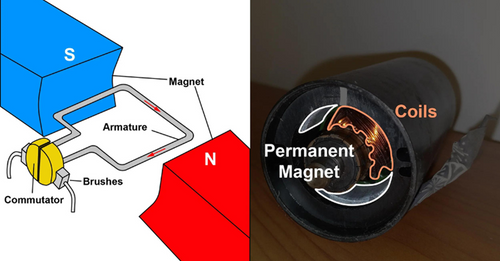
Actuators zijn fundamentele componenten in diverse mechanische systemen en spelen een cruciale rol bij het omzetten van energie in beweging. In essentie gebruikt een actuator een energiebron, doorgaans elektrisch, hydraulisch of pneumatisch, en zet deze om in fysieke beweging. Dit wordt bereikt via verschillende componenten en mechanismen, afhankelijk van het type actuator.
Bij elektrische lineaire actuatoren wordt elektrische stroom gebruikt om een rotatiebeweging te produceren in een elektromotor die mechanisch gekoppeld is aan een tandwielkast en een leadscrew gebruikt om de stang van de actuator, die aan een ACME-moer is bevestigd, te bewegen voor lineaire beweging. Er bestaan ook varianten met kogelomloopspindel, die verschillende voor- en nadelen bieden om aan andere toepassingen te voldoen.
Hoewel traditionele actuatoren een forse bouw kunnen hebben, zijn micro- en mini-elektrische lineaire actuatoren ontworpen om hetzelfde werk op veel kleinere schaal te doen. Deze compacte apparaten passen in krappe ruimtes en zijn perfect voor toepassingen waarbij precisie en subtiliteit belangrijk zijn. Als er voor een lange slaglengte wordt gekozen, zijn breedte en hoogte de belangrijkste afmetingen die de compacte bouw van micro- en mini-actuatoren benadrukken.
Als we uitgaan van een korte slaglengte van 2 inches, zijn de breedte en hoogte van micro-actuatoren meer dan compact genoeg om in de palm van uw hand te passen. Mini-actuatoren hebben grotere afmetingen dan micro-actuatoren, maar blijven toch compact – hun bouwvolume is slechts ongeveer de helft tot een derde van dat van standaard actuatoren.

Voordelen van micro- en mini-elektrische lineaire actuatoren

Micro- en mini-elektrische lineaire actuatoren bieden een reeks voordelen die ze tot een onmisbaar onderdeel van de moderne samenleving maken. Hun compacte formaat maakt integratie in krappe ruimtes mogelijk en biedt precieze controle en beweging waar grotere actuatoren niet passen.
Een geminiaturiseerd formaat vergroot de veelzijdigheid en aanpasbaarheid van de systemen waarin ze zijn geïntegreerd en maakt energiezuinige werking mogelijk dankzij hun kleinere motoren.
- Compacte afmetingen: Hun aanzienlijk kleinere breedte en diepte zorgen voor een vormfactor die voldoet aan strikte ruimtebeperkingen of helpt om de resterende beschikbare opbergruimte in compartimenten te maximaliseren.
- Precisie: Ontworpen met opties voor positionele terugkoppeling om toepassingen met hoge nauwkeurigheidseisen aan te kunnen; ze bieden exacte bewegingscontrole en hebben kleinere fabricagetoleranties dan grotere lineaire actuatoren.
- Efficiëntie: Ondanks hun formaat zijn ze energiezuinig, met lage stroomopname en ingebouwde eindschakelaars of een laag stroomverbruik in rust, waardoor ze ideaal zijn voor draagbare systemen en batterijgevoede apparaten.
- Veelzijdigheid: Opties voor verschillende krachtwaarden, snelheden, slaglengten, typen terugkoppeling, spanningsbedrijf en andere aanpasbare specificaties maken micro- en mini-actuatoren veelzijdig inzetbaar – van medische apparaten tot consumentenelektronica.
De juiste micro- en mini-actuator voor uw project kiezen
Bij het selecteren van de juiste micro- of mini-actuator voor uw project spelen een aantal belangrijke overwegingen mee:
- Belastingsvereisten: Verwijst naar hoeveel kracht uw toepassing nodig heeft. Dit beïnvloedt uw keuze van het actuatormodel.
- Snelheid: Afhankelijk van de toepassing heeft u mogelijk een snelle of trage, compacte actuator nodig. Kies op basis van de behoeften van uw toepassing.
- Slaglengte: Dit geeft aan hoe ver de actuator moet bewegen. Zorg ervoor dat de slaglengte overeenkomt met de vereiste verplaatsingsafstand van uw project.
- Elektrische voedingsvereisten: De vereisten voor spanning en stroomopname van elk actuatormodel kunnen variëren. Overweeg de beschikbare opties voor spanning en voeding voor uw compacte actuator.
- Omgevingsbestendigheid: Houd rekening met uw toepassing en de omgeving om te bepalen of uw compacte actuator bestand moet zijn tegen een bepaald niveau van stof, vloeistofindringing en/of corrosie.
- Positionele terugkoppeling: Bepaal of uw toepassing een bepaald niveau van precieze beweging/positioneringsmogelijkheden vereist of dat eenvoudige handmatige bediening vooruit/achteruit volstaat.
- Compatibiliteit van het besturingssysteem: Kies besturingssystemen die compatibel zijn met de gekozen compacte actuator(en). Als u al besturingssystemen hebt, zorg er dan voor dat de gekozen actuator(en) compatibel zijn.
We hebben ook een online quiz met vragen die u kunnen helpen bij het kiezen uit ons assortiment micro- en mini-actuatoren om het meest geschikte model voor uw behoeften te vinden.
Belastingsvereisten
Er zijn een paar factoren betrokken bij het vinden van de juiste kracht om aan de belastingsvereisten van een toepassing te voldoen. Variabelen kunnen de belasting zelf, de hoek waarop de belasting wordt aangebracht en de afmetingen van de belasting omvatten. Belastingsvereisten worden gemeten aan de hand van hoeveel kracht er direct op de stang van een actuator moet worden gedrukt en/of eraan moet worden getrokken (voorbeeld-eenheden: lbs, kg, newton).
Snelheid
Verplaatsingssnelheden zijn doorgaans afhankelijk van de krachtclassificatie-opties waarvoor een actuator is geconfigureerd. Sommige modellen bieden meerdere krachtclassificatie-opties die bij een online bestelling geselecteerd kunnen worden. Deze verschillende krachtopties hebben interne tandwielverhoudingen die zijn afgestemd op een bepaald koppel en die ook de verplaatsingssnelheid van de actuator beïnvloeden. De snelheid van een actuator wordt gemeten als de afgelegde afstand over een tijdsperiode (voorbeeld: inch/seconde, mm/seconde)
Slaglengte
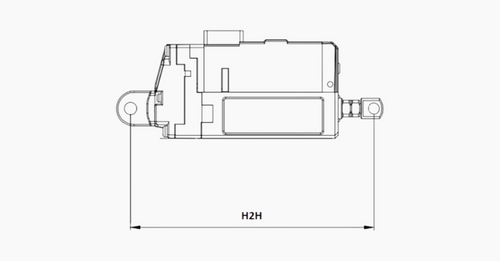
De gat-tot-gat (H2H) lengte van een actuator, gemeten van het midden van het achterste montagegat tot het midden van het voorste montagegat, wordt beïnvloed door de slaglengte. Dit komt doordat een langere slaglengte een actuator met een langere behuizing vereist om de ingeschoven stang te huisvesten. De slaglengte kan worden berekend door de volledig gesloten H2H-lengte af te trekken van de volledig geopende H2H-lengte van de actuator (voorbeeld-eenheden: inch of kort " , mm)
Elektrische voedingsvereisten
Een toepassing kan een reeds bestaande stroombron hebben of een nieuw geïnstalleerde voeding met bepaalde elektrische waarden en vereisten. Controleer de spanningsniveaus (VDC of VAC) en stroomniveaus (ampère of A) van de stroombron(nen) en actuator(en) om te verifiëren dat ze binnen het geschikte bereik liggen. De algemene vuistregel is dat de voeding een hogere stroomnennwaarde moet hebben dan de gecombineerde maximale stroombehoefte van alle units die op de voeding zijn aangesloten.
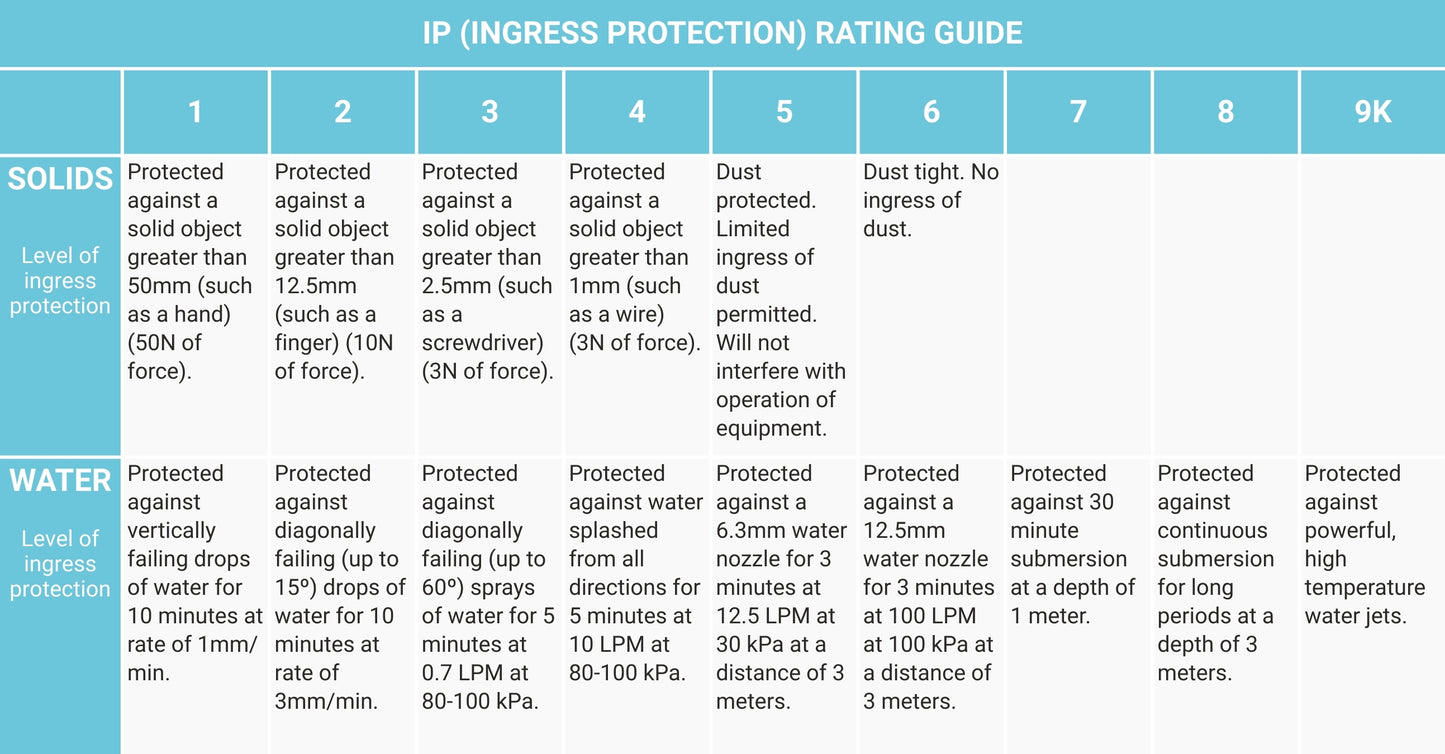
Omgevingsbestendigheid
Het Ingress Protection (IP)-klassificatiesysteem gebruikt een 2-cijferig systeem om de beschermingsklasse voor alle producten te definiëren. Het eerste cijfer staat voor bescherming tegen vaste stoffen en het tweede tegen vloeistoffen. De IP-code is ontworpen om beschermingsklassen te standaardiseren en verkeerde interpretatie/misrepresentatie van de beschermingscapaciteit van een product te beperken. Zoutsproeiclassificatie is cruciaal voor bescherming tegen corrosie die kan optreden door bijvoorbeeld gestrooide wegen, stranden, zout water, enz.
Positionele terugkoppeling
Ingebouwde positionele terugkoppelingsapparaten zoals encoders, Hall-effectsensoren, potentiometers, enz. worden gebruikt om signalen door te geven die door een controller worden uitgelezen om de positie van de slag van de actuator te bepalen. Dit maakt mogelijkheden mogelijk zoals meerdere actuatoren die samen met dezelfde snelheid in gesynchroniseerde beweging kunnen reizen, geheugenpresets en/of positieweergave.
Compatibiliteit van het besturingssysteem

Controleer of uw actuator de juiste communicatieprotocollen/positionele terugkoppeling heeft voor de controllers die u overweegt. Zo bieden de PA-12-T (TTL/PWM) en PA-12-R (RS-485) Micro Precision Servo Actuator precieze positiebesturing met een positienauwkeurigheid tot 100 um en vereisen geavanceerde communicatieprotocollen voor dergelijke prestaties.
Een andere overweging is of het type motor van uw actuator compatibel is met een besturingssysteem. Continu werkende borstelloze motoren, zoals die in onze op maat bestelde PA-14 actuatoren, vereisen besturingsboxen die compatibel zijn met hun werking, zoals de LC-241 besturingsbox.
Om te zien welke van onze besturingsboxen en actuatoren compatibel zijn met elkaar, bekijkt u onze vergelijkings- en compatibiliteitstabellen voor besturingsboxen.
Programmeerbare functies
Besturingsboxen zoals onze FLTCON-serie maken geprogrammeerde functies, veiligheidsfuncties en andere gebruikersinstellingen mogelijk die toegankelijk zijn via de aangesloten afstandsbediening. Wanneer meerdere actuatoren met Hall-effect zijn aangesloten op een FLTCON-besturingsbox, zorgt de besturingsbox voor de synchronisatie van de motoren zodat ze samen met dezelfde snelheid bewegen.
Eenvoudige handmatige bediening
Houd rekening met eventuele budgetbeperkingen voor het project en kies een besturingssysteem dat de beste waarde voor uw investering biedt en toch aan uw prestatie-eisen voldoet. Eenvoudige binnentoepassingen die geen hoge precisie vereisen, werken bijvoorbeeld probleemloos door een eenvoudige wipschakelaar te bedraden zonder hoge beschermingsgraad om een 2-aderige micro- of mini-lineaire actuator tegen een betaalbare prijs te bedienen.

Technische specificaties van micro- en mini-actuatoren
Nadat de vereiste specificaties en functies voor een bepaalde toepassing zijn bevestigd, is de volgende stap het beschikbare modellenaanbod doornemen om te bepalen welke de meest geschikte specificaties voor uw behoeften biedt. Micro-actuatoren hebben bepaalde specificaties die overlappen met die van mini-actuatoren; het meest opvallende verschil tussen de twee categorieën is echter meestal het bereik van de krachtspecificaties.
Krachtclassificaties
Micro-actuatoren kunnen variëren tussen 1.34 lbs en 39 lbs in dynamische krachtclassificatie en 0.67 lbs tot 56 lbs voor statische krachtclassificaties. Mini-actuatoren kunnen variëren van 16 lbs tot 450 lbs in zowel dynamische als statische krachtclassificaties.
| Krachtclassificatie (Micro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Dynamisch | 8 - 39 lbs | 5 lbs | 1,34 - 2.69 lbs | 3,82 - 22.48 lbs |
| Statisch | 8 - 56 lbs | 6.5 lbs | 0,67 - 2.69 lbs | 1,57 - 22.48 lbs |
| Krachtclassificatie (Mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Dynamisch | 16 - 225 lbs | 330 lbs | 450 lbs | 35 - 150 lbs |
| Statisch | 16 - 225 lbs | 330 lbs | 450 lbs | 35 - 150 lbs |
Slaglengten
Micro-actuatoren hebben een slaglengte die varieert tussen 0.5 inch en 12 inch, terwijl mini-actuatoren kunnen variëren tussen 1 inch en 40 inch. Naast de lengte zijn ook de fysieke afmetingen van micro-actuatoren, zoals breedte en hoogte, compacter in vergelijking met mini-actuatoren.

Snelheden
De snelheid van micro-actuatoren kan variëren tussen 0.24"/sec en 2.67"/sec bij volle belasting en 0.30"/sec tot 3.15"/sec zonder belasting. Mini-actuatoren kunnen variëren tussen 0.16"/sec en 2.95"/sec bij volle belasting en 0.28"/sec tot 3.54"/sec zonder belasting.
| Snelheid (Micro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Zonder belasting | 0.31 - 1.85"/sec | 0.59"/sec | 0.47 - 1.42"/sec | 0.30 - 3.15"/sec |
| Volbelasting | 0.24 - 1.18"/sec | 0.55"/sec | 0.35 - 0.99"/sec | 0.25 - 2.67"/sec |
| Snelheid (Mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Zonder belasting | 0.28 - 3.54"/sec | 0.39"/sec | 0.28 - 0.56"/sec | 0.37 - 2.00"/sec |
| Volbelasting | 0.20 - 2.95"/sec | 0.27"/sec | 0.16 - 0.33"/sec | 0.28 - 1.38"/sec |
Positionele terugkoppeling
Positionele terugkoppeling en opties voor communicatieprotocollen die beschikbaar zijn voor micro-actuatoren, omvatten TTL/PWM (PA-12-T) en RS-485 (PA-12-R), terwijl mini-actuatoren opties hebben zoals Hall-effectsensoren (PA-09 & PA-10) en ingebouwde potentiometer-terugkoppeling (PA-14).
Elke individuele voorraadactuator kan slechts met één type positionele terugkoppeling of communicatieprotocol worden geleverd. Het type positionele terugkoppeling dat voor een actuator wordt gekozen, beïnvloedt de compatibiliteit met bestaande besturingssystemen. Maatwerkbestellingen voor bepaalde modellen kunnen opties hebben zoals eindschakelaar-terugkoppeling.
Bedrijfsspanning
De belangrijkste standaardspanningsoptie voor al onze mini- en micro-actuatoren is 12 VDC voor hun geborstelde DC-motoren. Opties voor 24 VDC zijn beschikbaar voor alle mini-actuatoren, terwijl micro-actuatoren 7,4 VDC als optie hebben voor de PA-12-T. Het kiezen van een hogere spanningsoptie resulteert doorgaans in een lagere stroomopname voor hetzelfde model.
Stroomopname
Micro-actuatoren hebben een stroomopname die varieert tussen 200 mA en 2,3 A bij volle belasting en 30 mA tot 200 mA zonder belasting. Mini-actuatoren nemen tussen 2 A en 6 A op bij volle belasting en 500 mA tot 1,5 A zonder belasting.
Om onze verschillende modellen micro- en mini-actuatoren te vergelijken, hebben we een referentie-vergelijkingstabel samengesteld.
Micro- en mini-elektrische lineaire actuatoren monteren

De eenvoudigste manier om te zorgen dat u de juiste montagebeugels voor uw lineaire actuator hebt, is door uw montagebeugels bij de oorspronkelijke fabrikant van de actuator te betrekken en te verifiëren dat ze compatibel zijn. Voor meer informatie bieden we onze compatibiliteitstabel voor montagebeugels en productbeschrijvingen onder elk van onze actuatoren.
Andere fabrikanten kunnen ook vergelijkbare bronnen hebben; u kunt echter ook contact opnemen met onze klantenservice indien nodig. In bepaalde gevallen moeten gebruikers met unieke vereisten of specialistische toepassingen overwegen om hun eigen beugels op maat te maken volgens de benodigde afmetingen, het ontwerp en de vorm. Bekijk onze 3D-tekeningen van actuatoren als extra referentiebron.
Net zo belangrijk als het vinden van compatibele montagebeugels voor uw elektrische micro- en mini-actuatoren is het kiezen van een montageproces met een methode die geschikt is voor uw toepassing. Hieronder staan twee veelgebruikte methoden om een elektrische lineaire actuator te monteren.
- Montage met twee draaipunten
- Stationaire montage
Montage met twee draaipunten

Montage met twee draaipunten is een methode waarbij een actuator aan beide zijden wordt bevestigd met een montagepunt dat vrij kan draaien, meestal bestaande uit een montagepen of een vork. Deze montage stelt de actuator in staat om aan beide zijden te zwenken tijdens het uit- en inschuiven, waardoor de toepassing een vaste baanbeweging kan bereiken met twee vrije draaipunten.
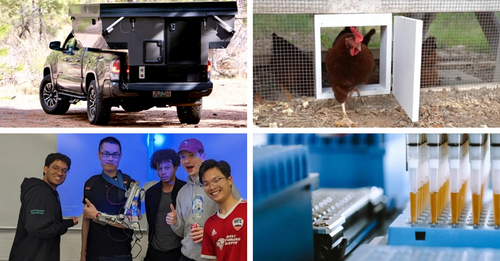
Een voorbeeldtoepassing van deze methode is het automatisch openen en sluiten van kippenhokdeuren. Wanneer de actuator uitschuift, laten de twee vaste punten de deur opendraaien. Het openen en sluiten van de deur veroorzaakt hoekveranderingen, maar de draaipunten bieden voldoende ruimte zodat de twee montagepunten kunnen roteren. Zorg er bij deze methode voor dat er voldoende ruimte is voor de actuator om uit te schuiven, zonder obstakels op zijn pad.
Stationaire montage
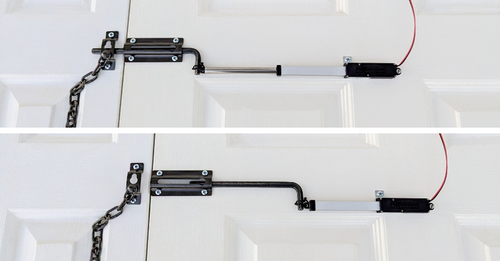
Bij de stationaire montagemethode kan de stang in een rechte lijn uit de behuizing uitschuiven en weer inschuiven, terwijl de rest van de actuator in een vaste, stationaire positie is gemonteerd. Een montagebeugel voor de stangbehuizing kan worden gebruikt om de ideale uitlijning van de actuator op het gemonteerde oppervlak te behouden.
Dit soort montage wordt vaak gebruikt om acties zoals duwen en trekken van een hulpstuk recht op het doel af te realiseren. Zo is deze vorm van montage ideaal voor het duwen en trekken van een schuifgrendel om een deur te vergrendelen en ontgrendelen. Zorg er bij de keuze voor deze methode voor dat de montageconstructie de belasting kan dragen die door de actuator wordt uitgeoefend.
Toepassingen van micro- en mini-actuatoren
De veelzijdigheid van micro- en mini-compacte actuators met efficiënte werking, duurzame constructie, maatwerkopties en krachtige specificaties opent een wereld aan eindeloze mogelijkheden. Hier zijn enkele voorbeeldtoepassingen en sectoren waarin ze worden gebruikt:
- Huisautomatisering: Het extra gemak en de hogere veiligheid van veiligheidsdeursloten, gemotoriseerde pergola's met lamellendak, automatische deuren en projecten met verborgen ingangen zijn slechts enkele gebieden in huis die profiteren van micro- en mini-compacte actuators. Hun ruimteefficiëntie, lage onderhoudsvereisten en eenvoudige bediening maken ze populair voor commercieel gebruik én bij de doe-het-zelfgemeenschap van huiseigenaren.
- Maatwerk-/DIY-projecten: In veel gevallen is het prototypen van een nieuw product of het maken van versies op kleine schaal een cruciale stap om potentiële uitdagingen te bepalen die moeten worden aangepakt voordat met een definitief project wordt doorgegaan. Micro- en mini‑actuators met hun compacte behuizing en veelzijdige specificaties helpen beweging aan te drijven om een proof‑of‑concept te demonstreren en een project op ware grootte te simuleren.
- Medische sectoren: In de medische sector is precieze regeling van micro‑actuators van cruciaal belang voor apparatuur die is ontworpen voor het omgaan met vloeistofstromen, het aandrijven van chirurgische robots of het positioneren van medische apparatuur. Verstelbare bedden, stoelen, revalidatie‑ en beeldvormingsapparatuur kunnen mini‑actuators integreren om stille, vloeiende bewegingen in ziekenhuisomgevingen aan te sturen.
- Automobielindustrie: Voorbeelden zijn het openen van opbergvakken, het optillen van campers, het kantelen van spiegels, het afstellen van ramen en het automatiseren van dakombouwen. Door de voordelen van micro‑ en mini‑actuators te combineren, verbeteren ze de rij‑ en gebruikservaring zonder veel ruimte in te nemen dankzij hun compacte vormfactor.
- Entertainmentindustrie: Pretparken en Halloween‑kostuums gebruiken animatronics, filmrobots en special‑effect‑rekwisieten die het publiek boeien met levensechte bewegingen. Dit wordt mogelijk gemaakt door de grote verscheidenheid aan configuraties die beschikbaar zijn in micro‑ en mini‑actuators om strenge ruimtebeperkingen, krachteisen en buitenomgevingen aan te kunnen, terwijl ze energie‑efficiënt blijven.
De toekomst van micro- en mini‑elektrische lineaire actuators
Hoewel micro- en mini‑elektrische lineaire actuators misschien niet de meeste media‑aandacht krijgen in de techwereld, spelen ze wel een cruciale rol in het verleggen van de grenzen van wat mogelijk is. Naarmate de technologie vooruitgaat, zal de vraag naar kleinere en efficiëntere componenten blijven groeien.
Of u nu het volgende revolutionaire gadget ontwerpt of geavanceerde medische apparatuur ontwikkelt, micro‑ en mini‑actuators hebben een veelbelovende toekomst en zouden wel eens de compacte oplossingen kunnen zijn waarvan u niet wist dat u ze nodig had.
Materiaalverbeteringen
Materialen zullen een sleutelrol spelen bij het verbeteren van de prestaties en duurzaamheid van actuators. De ontwikkeling van geavanceerde composieten maakt lichtere, veerkrachtigere actuators mogelijk die hogere belastingen aankunnen en in extremere omgevingen kunnen werken. Deze materialen dragen ook bij aan het verkleinen van de totale omvang van actuators zonder concessies te doen aan de structurele integriteit en het vermogen.
Grotere prestaties
De algehele prestaties van mini- en micro‑actuators zullen naar verwachting verder verfijnd worden, met een focus op het verhogen van de kracht‑tot‑grootte‑verhouding. Dit wordt bereikt door de integratie van hoogrendementsmotoren en geoptimaliseerde tandwielsystemen, wat zorgt voor meer precisie en controle. Daarnaast zal de miniaturisatie van componenten het mogelijk maken om compacte actuators in steeds kleinere ruimtes te plaatsen, waardoor hun toepassingsgebied wordt verbreed.
Nauwkeurigheidsverbeteringen
De nauwkeurigheid van positionele terugkoppeling zal naar verwachting aanzienlijk verbeteren door de incorporatie van geavanceerde sensortechnologieën. Het gebruik van optische encoders, Hall‑effectsensoren en andere terugkoppelingsmechanismen met hoge resolutie die in ontwikkeling zijn, zal precieze controle over de actuatorbeweging bieden. Dit is cruciaal in toepassingen waar exacte positionering essentieel is, zoals bij chirurgische robots of precisie‑productieapparatuur.
Samengevat
Micro- en mini‑actuators zijn veelzijdige componenten die toepassingen met ruimtebeperkingen tot hun volle potentieel optimaliseren dankzij hun duurzaamheid, efficiëntie en precisie. Door de verschillende typen micro‑ en mini‑actuators, hun specificaties en het selectieproces te begrijpen, kunnen gebruikers een optimale werking garanderen en resultaten behalen die aansluiten bij de behoeften van hun toepassing.
We hopen dat u dit net zo informatief en interessant vond als wij, vooral als u op zoek was naar begeleiding bij het kiezen van geschikte micro‑ en mini‑elektrische lineaire actuators voor uw toepassing. Als u vragen heeft over onze producten of moeite heeft om de juiste elektrische lineaire actuators te kiezen die aan uw behoeften voldoen, neem dan gerust contact met ons op! Wij zijn experts in wat we doen en helpen u graag met al uw vragen!
Mini‑actuators zijn groter dan micro‑actuators; toch hebben mini‑actuators nog steeds een compact ontwerp, met ongeveer de helft tot een derde van het bouwvolume van standaard actuators.
Onze micro‑actuators zijn beschikbaar met slaglengten van 0,5 - 12 inch terwijl onze mini‑actuators variëren van 2 - 40 inch.
De spanningsvereisten van onze actuators variëren per model; het merendeel van onze modellen heeft opties of is standaard geschikt voor werking op 12 VDC.
De IP‑klassificaties van onze actuators variëren per model; micro‑ en mini‑actuators lopen echter uiteen van IP54 tot IP66.
Synchrone beweging met meerdere actuators is mogelijk wanneer de actuators over ingebouwde positionele terugkoppeling beschikken, zoals Hall‑effectsensoren, gekoppeld aan compatibele Hall‑effect‑besturingsboxen die zijn geprogrammeerd om ze synchroon te houden.