
- Introduktion till hur ställdon fungerar
- Positionsåterkopplingsmekanismer
- Typer av styrsystem för ställdon
- Feedback och felkorrigering
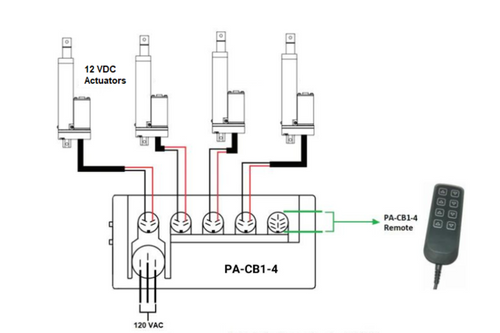
- Kontrollboxar för linjära ställdon
Introduktion till hur ställdon fungerar
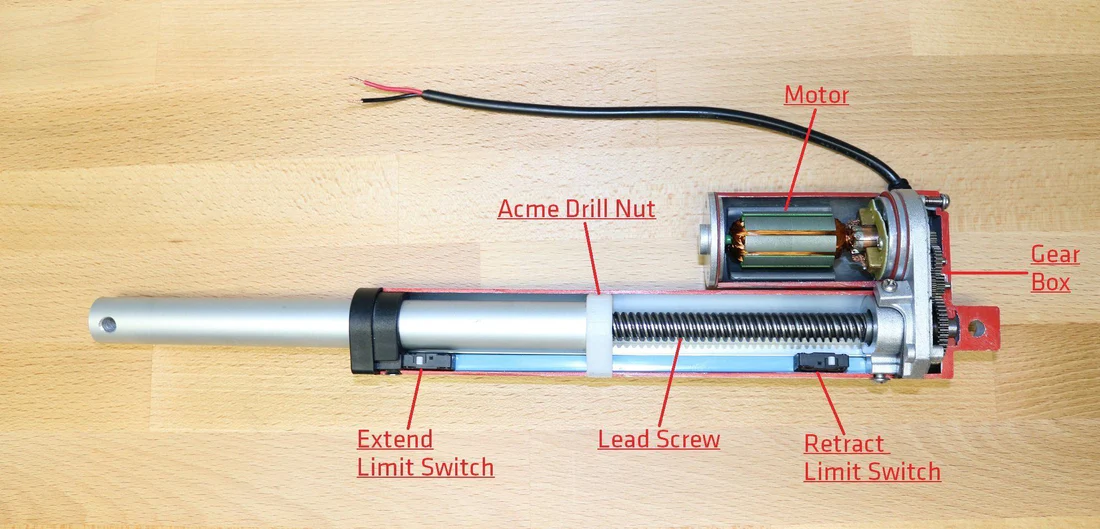
I elektriska linjära ställdon, elektrisk ström används för att producera rotationsrörelse i en elmotor som är mekaniskt kopplad till en växellåda och använder en lead
screw att cykla ställdonets axel som är fäst vid en HÖJDPUNKT borrmutter för linjär rörelse. Styrsystem för ställdon har utvecklats avsevärt under åren, vilket har förbättrat mångsidigheten och funktionaliteten hos dessa enheter. Linjära ställdon kan manövreras med olika metoder och kontrollmekanismer, inklusive:
• Trådlösa styrenheter – erbjuder användarna bekvämligheten med fjärrstyrning på avstånd utan behov av fysiska kablar.
• Wi-Fi- och Bluetooth-kompatibla styrenheter - möjliggör integration i smarta system och åtkomst via mobila enheter, vilket ger användarvänliga gränssnitt och möjlighet att justera inställningar på distans och exakt.
Dessa framsteg inom ställdonsteknik och styrsystem har breddat deras tillämpningsområde, vilket gör dem oumbärliga i moderna automatiserade system. Oavsett om det gäller att justera fönster i fordon, kör tungt jordbruksutrustning, eller automatisering av hushållsapparater, ställdon fortsätter att vara avgörande för att omsätta elektriska signaler till fysisk handling.

Förstå styrsystem för ställdon
Det primära syftet med dessa system är att säkerställa att ställdon fungerar korrekt, effektivt och tillförlitligt enligt fördefinierade parametrar. Betydelsen av styrsystem i ställdonets drift kan inte överskattas, särskilt när det gäller att uppnå exakt och effektiv rörelsekontroll. Dessa system är avgörande av flera skäl:
1. Precision: Styrsystem möjliggör finjustering av ställdonsrörelser för att uppnå höga nivåer av repeterbarhet och noggrannhet. Detta är viktigt i applikationer där exakt positionering är avgörande, till exempel inom robotkirurgi eller flyg- och rymdteknik.
2. Effektivitet: Genom att optimera hur ställdon reagerar på kommandon minskar styrsystem energiförbrukningen och minimerar slitage. Detta förlänger inte bara ställdonets livslängd utan förbättrar också den totala effektiviteten hos det system det arbetar inom.
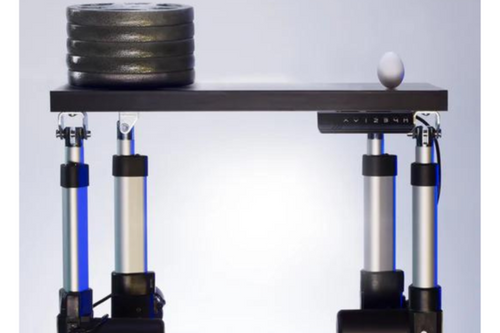
3. Anpassningsförmåga: Återkopplingsmekanismer kan justera beteendet hos kompatibla ställdon i realtid genom att analysera positionsåterkopplingen från kompatibla ställdon. Denna anpassningsförmåga är avgörande i dynamiska miljöer där förhållandena förändras snabbt, till exempel i automatiserade tillverkningsprocesser eller när flera ställdon upplever ojämn viktfördelning.
5. Säkerhetsfunktioner: Programmerade säkerhetsfunktioner som överbelastningsskydd hjälper till att förhindra skador på ett ställdon eller applikationen genom att stoppa driften efter att styrboxen har upptäckt en alltför hög elektrisk strömförbrukning. En annan säkerhetsfunktion som finns i kontrollboxar inkluderar överhettningsskydd för att stoppa driften efter en viss cykeltid för att säkerställa att driften håller sig inom ett ställdons arbetscykelklassificering, vilket undviker motorutbränning. Styrsystem är grundläggande för ställdons funktionalitet och ger den nödvändiga intelligensen och anpassningsförmågan för att säkerställa precision, effektivitet, säkerhet och effektiv rörelsekontroll. Deras roll är avgörande inom den expanderande sfären av automationsteknik, där rörelseprecision ofta är hörnstenen för operativ framgång.
Komponenter och typer av styrsystem
Viktiga komponenter i en grundläggande styrenhet
I en grundläggande styrenhet utformad för elektriska linjära ställdon spelar varje komponent en avgörande roll för att säkerställa effektiv drift. Här är en sammanfattning av dessa huvudkomponenter, deras funktioner och de syften de tjänar:1. Reläer: Reläer fungerar som brytare som styr den elektriska högeffektskretsen med hjälp av en lågeffektssignal. För kontrollboxar utformade för att hantera 2-trådsställdon är två reläer viktiga för att reversera polariteten på spänningen som appliceras över ställdonets två ledningar, vilket i sin tur ändrar rörelseriktningen. Detta möjliggör dubbelriktad styrning i en enkel installation för att förlänga och dra in ställdonet.
2. Ingångskanaler: Ingångskanaler är gränssnitt genom vilka Styrsystemet tar emot elektriska signaler från externa källor, såsom strömförsörjning eller signaler från trådbundna fjärrkontroller. Kontrollboxar som arbetar med positionsåterkoppling kan också ta emot insignaler från sensorer på ett ställdon. Dessa kanaler bearbetar insignaler från användaren och/eller sensorer för att bestämma hur ställdonet ska fungera, vilket gör dem grundläggande för att initiera och styra ställdonsrörelser baserat på specifika krav.
3. Utgångskanaler: Utgångskanaler levererar styrsignaler från styrenheten till ställdonet eller andra komponenter som reläer. Kontrollboxar som arbetar med positionsåterkoppling kan också mata ut elektrisk ström så att sensorerna på ett ställdon har ström att fungera. Dessa kanaler är avgörande för att utföra de kommandon som bestäms av styrsystemet, vilket direkt påverkar ställdonets beteende.
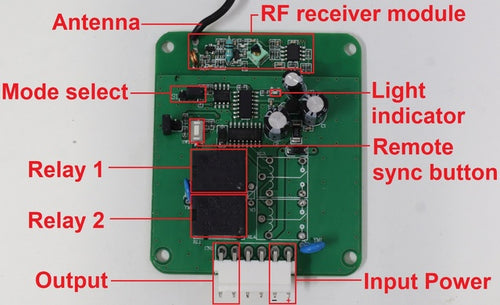
4. Fjärrsynkroniseringsknapp: Denna knapp används för att synkronisera styrsystemet med en fjärrkontrollenhet. Den säkerställer att fjärringångarna känns igen och bearbetas av styrsystemet, vilket underlättar bekväm och flexibel drift på avstånd.
5. Ljusindikator: Ljusindikatorer ger visuell feedback om systemets status. De kan vara en indikator för strömförsörjning på/av, driftlägen, feltillstånd eller signalmottagning, vilket hjälper till att övervaka och felsöka systemet utan att behöva komplexa diagnostiska verktyg.
6. Lägesval: Den här funktionen låter användaren växla mellan olika driftlägen för kontrollboxen, till exempel momentana eller icke-momentana kontroller. I momentant läge måste en fjärrkontrolls knapp kontinuerligt hållas i aktivt läge för att enheten ska fungera. När du släpper brytaren slutar enheten att fungera. Icke-momentant läge fungerar som en brytare som förblir i sitt senast inställda läge tills den ändras igen, oavsett om den trycks in. Det betyder att när den aktiveras fortsätter enheten att fungera tills brytaren stängs av manuellt.
7. Antenn: Antennen är en del av kontrollboxar som har en trådlös kommunikationskonfiguration. Antenner används för att förbättra signalräckvidden och kvaliteten mellan styrsystemet och fjärrkontrollenheter eller mellan sammankopplade system. Det är avgörande för att upprätthålla robust kommunikation i miljöer där direkt kabeldragning är opraktisk eller oönskad.
8. RF-mottagarmodul: Denna Modulen tar emot radiofrekvenssignaler som skickas av trådlösa fjärrkontroller. Den avkodar dessa signaler till handlingsbara kommandon som styrsystemet kan förstå och agera utifrån. RF-mottagarmodulen är avgörande för trådlösa styrsystem och möjliggör fjärrstyrning av ställdonet utan fysisk kontakt. Tillsammans bildar dessa komponenter ett omfattande styrsystem för 2-trådsställdon, där var och en har en specifik funktion som bidrar till den övergripande effektiviteten och ändamålsenligheten i ställdonets drift. Detta system möjliggör inte bara exakt kontroll över ställdonets rörelser utan förbättrar också användargränssnittet och interaktionen, vilket gör det anpassningsbart till ett brett spektrum av applikationer.
Positionsåterkopplingsmekanismer
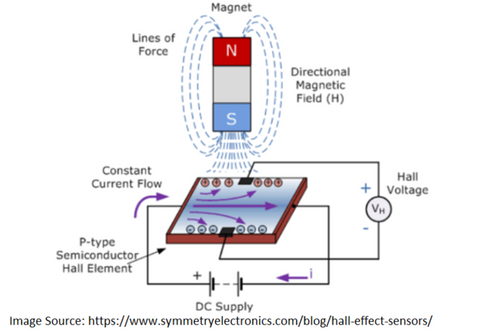
Halleffektsensorer
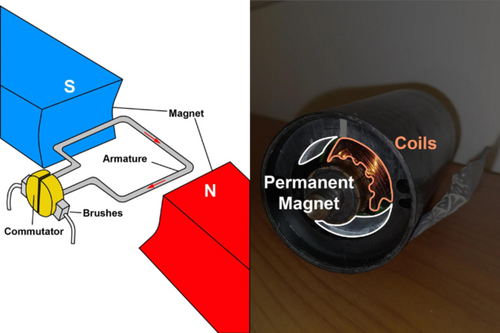
Edwin Hall (som upptäckte Halleffekten) menade att närhelst ett magnetfält appliceras i en riktning vinkelrät mot strömflödet i en ledare, induceras en spänningsskillnad. Denna spänning kan användas för att detektera om en Halleffektsensor befinner sig i närheten av en magnet.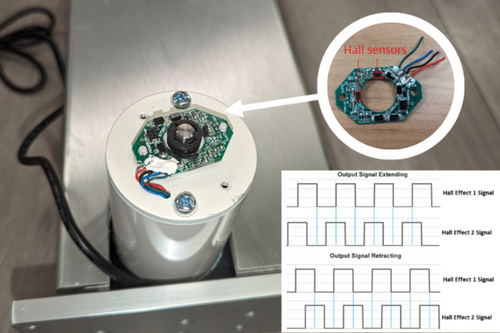
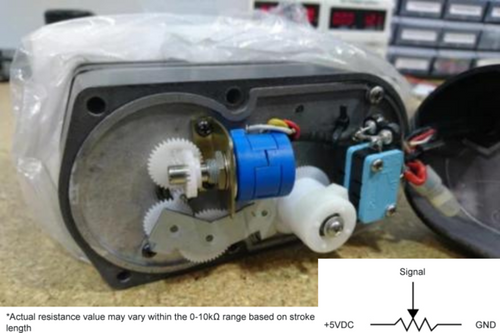
Potentiometrar
En potentiometer ger ett variabelt motstånd som är proportionellt mot ställdonets position. Kugghjul är ofta kopplade mellan potentiometerns vred och ställdonets roterande motor. När ställdonet rör sig ändras motståndsvärdet, vilket kan mätas och omvandlas till positionsdata. Denna information används sedan av ett styrsystem för att göra finjusteringar av ställdonets position, vilket förbättrar noggrannheten.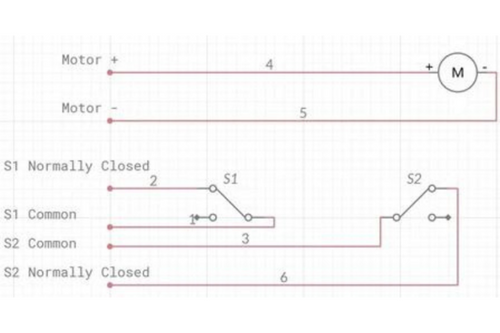
Återkoppling av gränslägesbrytare
Syftet med återkopplingssignaler för gränslägesbrytare är att låta ett system avgöra om ställdonet fysiskt har utlöst de interna gränslägesbrytarna. Denna typ av återkoppling är enkel och användbar för applikationer som huvudsakligen bara kräver information om huruvida ställdonet har nått helt utfällt eller helt infällt läge.Typer av styrsystem för ställdon
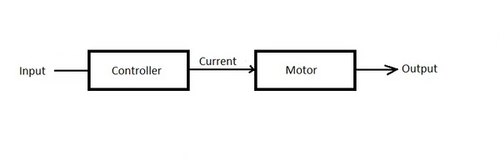
Ett exempel på ett enkelt öppet system inkluderar en momentan vippströmbrytare kopplad till ett linjärt ställdon. Detta kräver att en operatör fysiskt trycker och håller ner strömbrytaren för att ställdonet ska fortsätta att cykla, och om man släpper strömbrytaren innan ställdonet har nått slutet av sin rörelse kommer ställdonet att stanna halvvägs.
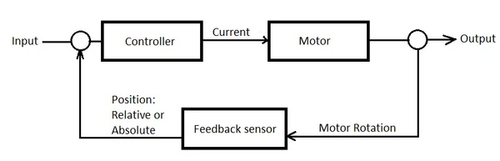
Valet av styrsystem och dess komponenter påverkar ställdonens funktionalitet och prestandaoptimering avsevärt. Genom att integrera effektiva återkopplingsmekanismer och välja lämplig typ av styrsystem kan ställdon optimeras för en mängd olika tillämpningar, vilket säkerställer både precision och tillförlitlighet i deras drift.
Feedback och felkorrigering
Variabler som styrsystem korrigerar för
1. Position: Styrsystem hjälper till att säkerställa att ett ställdon når och bibehåller önskad position korrekt genom att jämföra användarens position med den faktiska positionsavläsningen från positionsåterkopplingssensorerna. Exempel inkluderar när användare vid stående skrivbord trycker på en knapp på en regulator för att få ställdon att röra sig till en specifik förinställd minnesposition för att justera sin arbetsyta från sittande till stående höjd.
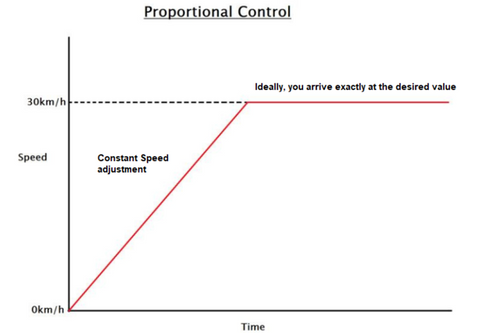
2. Hastighet: Att läsa positionsåterkoppling och dividera den tillryggalagda sträckan med hur mycket tid som har gått kommer att resultera i rörelsehastigheten. Vissa styrsystem möjliggör justerbara hastighetsinställningar via PWM (Pulse Width Modulation), vilket gör att ställdonet kan röra sig med olika hastigheter baserat på applikationens krav. Detta är användbart i applikationer där varierande hastigheter är nödvändiga, till exempel för ställdon som driver rörelsen i flygsimulatorer.
3. Kraft: Vissa styrsystem kan reglera mängden kraft som utövas av ställdon, vilket säkerställer att de fungerar inom säkra gränser och förhindrar skador på systemet eller omgivande komponenter. Genom att mäta den elektriska strömförbrukningen kan styrsystem mäta ungefär hur mycket kraft som utövas av linjära ställdon. Denna funktion är användbar för linjära ställdon som öppnar och stänger fönster för att stänga av strömmen och sluta applicera kraft om en persons hand eller hinder blockerar färdvägen.
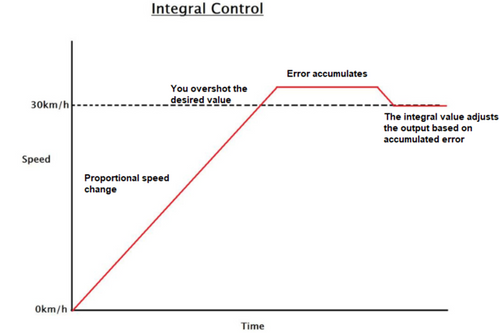
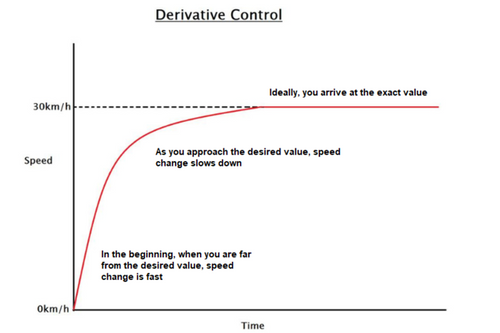
Typer av kontrollstrategier
Att välja rätt styrsystem
• Ingress Protection
• Compatibility
• Budget
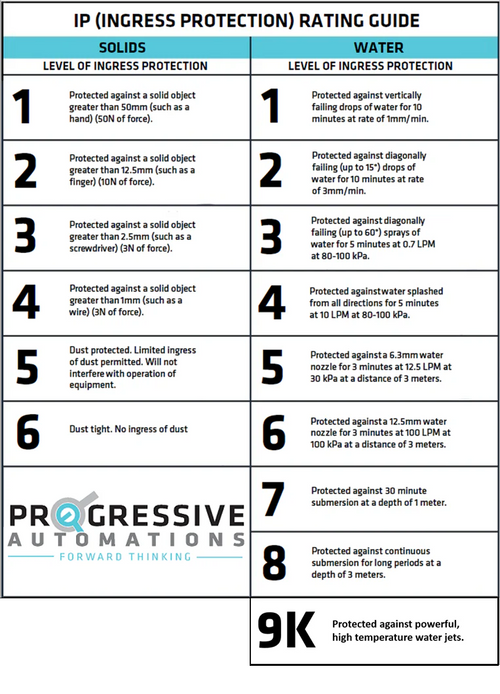
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Kontrollboxar av Hall-effekttyp
Läs vår blogg om applikationer för FLTCON-kontrollboxarna för mer information.
