
Mohou nastat případy, kdy budete chtít posunout objekt na delší vzdálenost, než je délka zdvihu aktuátoru. Toho můžete dosáhnout použitím teleskopického pohon Nebo můžete využít fyziku mechanického pákového efektu ve svůj prospěch. Běžnými příklady jsou nůžkový zvedák nebo to, co řekl náš přítel Mike Senna, tvůrce Robot Wall-E, udělal se svým Automatický otvírač dveří do kurníku pro kutily.
Mechanické využití páky
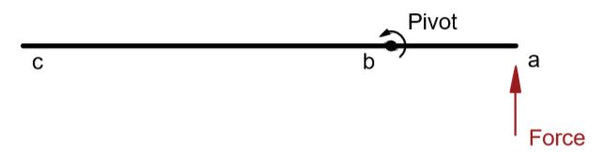
Fyzika, na které jsou tyto aplikace založeny, spočívá v použití poměru vzdáleností od otočného bodu na každé straně. Jak je vidět na obrázku 1, aktuátor je namontován v bodě „a“ s pevným otočným bodem v bodě „b“. Využití poměru „B“ a „A“ dosáhne poměru „R“. To znamená, že bod „c“ se otočí „R“krát více, než je zdvih aktuátoru. Tím se však zvýší síla potřebná aktuátorem a rychlost otáčení bodu „c“ „R“krát. Toto je princip, jak využít lineární aktuátor na základě jeho délky zdvihu a místa montáže.
Automatický otvírač dveří do kurníku pro kutily
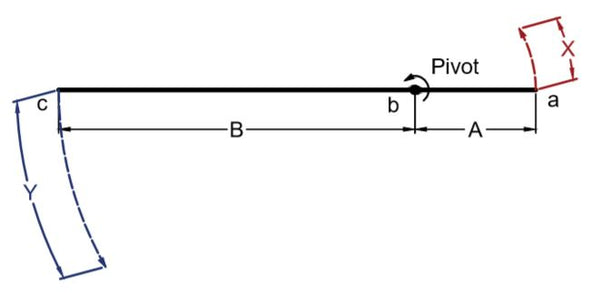
Žádost Mika Senny používá stejný princip jako výše a poskytuje skvělý příklad přidání dalšího členu pro převod rotace bodu „c“ na lineární pohyb. Na obrázku 2 vidíte, že horní člen se otáčí kolem otočného bodu a aktuátor tlačí v bodě „a“.
Obrázek 2: Horní prvek rotující kolem čepu v bodě b
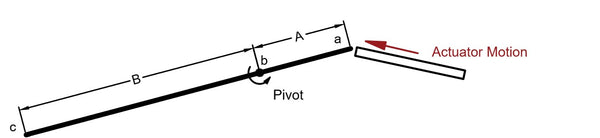
Mike věděl, že potřebuje, aby se dveře kurníku otevíraly přibližně o 18 palců. Aby se poměr „R“ rovnal třem a zajistil tak, že se bod „c“ posune o 18 palců s délkou zdvihu 6 palců, umístil otočný bod ¾ směrem k bodu „a“ (obrázek 3). Mike to udělal tak, že umístil rameno tak, aby na jedné straně otočného bodu bylo 3,5 palce a na druhé straně 10,5 palce (3,5 palce x 3).
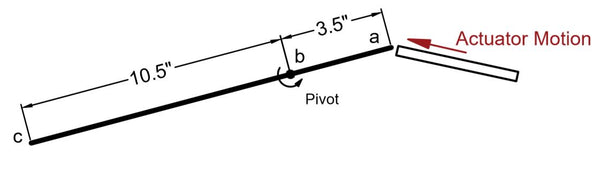
Obrázek 3: Horní prvek rotující kolem čepu v bodě b s kótou
After this, Mike added another member to transform the rotational motion to linear motion. He explains, “My solution was to add another arm whose purpose is to adjust for the arc as one end moves in an arc and the other end adjusts to a linear movement.” Figure 4 is a diagram made for his DIY Chicken Coop Automatic Door Opener projekt zobrazený v různých polohách podél jeho dráhy. Všimněte si, že rychlost dveří kurníku a síla vyvíjená pohonem se budou během dráhy měnit. Nyní bylo třeba upravit polohu, aby se dosáhlo požadované dráhy dveří.
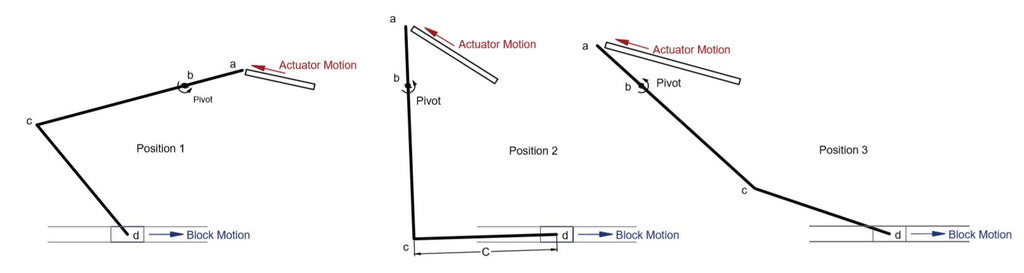
Obrázek 4: Dveře kurníku ve třech různých polohách
Nůžkový výtah
Nůžkový zvedák je další aplikací, která využívá tento princip k dosažení lineárnějšího pohybu pomocí mechanického pákového efektu. Pro ilustraci, jak využít lineární aktuátor, byl vytvořen 3D model s aktuátorem nůžkového zvedáku, který simuluje větší pohyb plošiny s relativně kratším pohybem aktuátoru.
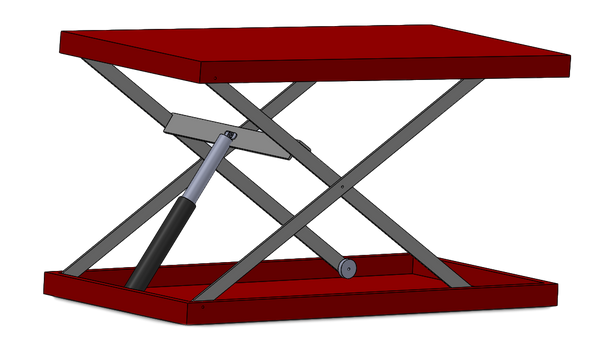
Obrázek 5: 3D model jednostupňového nůžkového zvedáku
Jak je vidět na obrázku 5, k zdvihu do výšky 36 palců byl použit aktuátor pro nůžkový zvedák s relativně krátkým zdvihem (v tomto případě 8 palců). Nůžkové zvedáky fungují na stejném principu, kdy se těleso otáčí kolem otočného bodu a vytváří se mechanická výhoda. Místo přidání dalšího prvku, jehož účelem je jednoduše přenášet rotační pohyb jednoho konce, je však pohyb konců prvků omezen na horizontální směr. To má za následek, že směr síly je pouze nahoru.
Zajímavé na nůžkovém zvedáku je, že pokud je pohon namontován na horní polovině, zvedák se s jeho vysouváním zvedne. Pokud je však pohon namontován na spodní polovině, zvedák se zvedne s jeho zasouváním. Všimněte si také, že čím blíže je pohon namontován ke střednímu kloubu nosníků, tím více se zvedák zvedne, ale pohon bude vyžadovat větší sílu.
Pokud zkoumáte, jak využít lineární aktuátor Pro přesun předmětu na delší vzdálenost postačí teleskopický pohon nebo nůžkový zvedací mechanismus pro kutily. Pokud jde o pohon pro nůžkový zvedací mechanismus nebo dveřní mechanismus, společnost Progressive Automations má na skladě řadu modelů s různými zdvihy a silami, které vyhoví všem vašim potřebám pro kutily.