Liikesimulaattorit ovat tärkeitä työkaluja insinöörianalyysiin, koulutukseen, opetukseen ja viihteeseen, sillä ne luovat realistisen tunteen liikkeessä olevista asioista. Lineaariset toimilaitteet ovat suosittu ratkaisu mekaanisten toimintojen tuottamiseen niiden tarjoamien merkittävien etujen vuoksi; liikesimulaattoreihin ne voidaan kuitenkin integroida monin eri tavoin ja moniin tarkoituksiin. Tässä artikkelissa käymme läpi muutamia esimerkkejä liikesimulaattoreista ymmärtääksemme paremmin, miten liikesimulaattorit ja lineaariset toimilaitteet toimivat yhdessä.
Käyttökohteet
On monia tapoja integroida sähköisiä lineaarisia toimilaitteita liikesimulaattoreihin. Muutaman esimerkin mainitaksemme toimilaitteita on käytetty tuottamaan lineaarista liikettä:
- lentosimulaattoreissa
- sotilasajoneuvojen simulaattoreissa
- huvipuistolaitteissa
- ajo-/kilpasimulaattoreissa
- avaruusalusten simulaattoreissa
- Stewart-alustoissa
- erilaisissa kolikkopelivideopeleissä
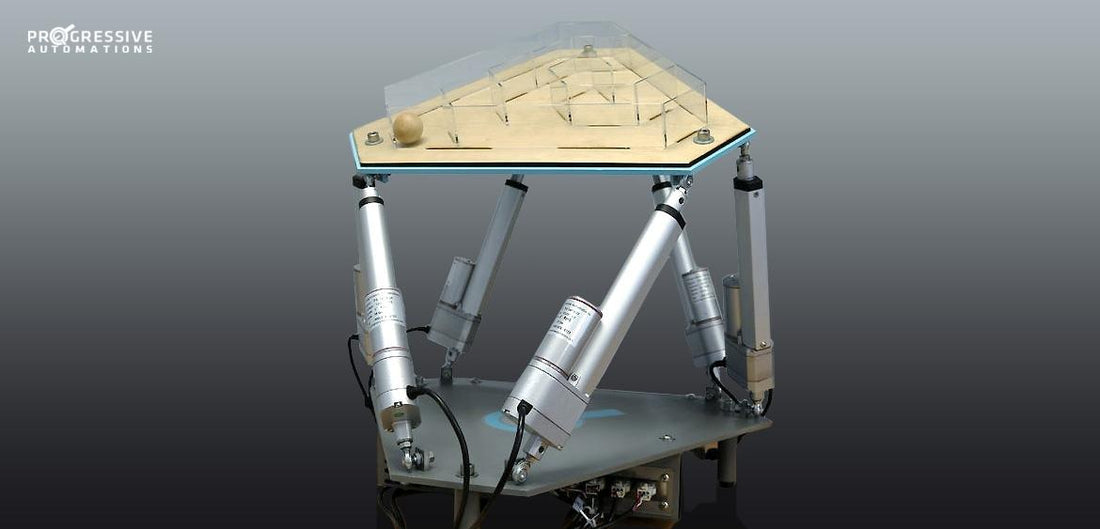
Kuusiakselinen alusta lineaarisilla toimilaitteilla (Stewart-alusta)

Progressive Automationsin ylpeänä sponsoroima UBC:n Engineering Physics -laitoksen Stewart-alusta tarjoaa mielenkiintoisen ja interaktiivisen tavan oppia lineaariliikkeen ohjauksesta sekä robotiikan fysiikasta.
Integroimalla PA-14P Palaute -lineaaritoimilaitteemme toimilaitteen sisäisistä potentiometreistä voidaan lukea palautesignaalien kautta asematietoa. Asematiedon avulla järjestelmä voi todentaa, ovatko toimilaitteet saavuttaneet vaaditut sijainnit tarkasti – näin virheet vähenevät ja toistettavuus paranee. Vaikka laitteet kuten Hall-efekti -anturit ja kiihtyvyysanturit voivat tarjota suurempaa tarkkuutta, niiden integrointi on monimutkaisempaa; potentiometripohjainen palaute tarjosi riittävän tarkkuuden helpommalla integroinnilla. Lisäksi PA-14P-6-35-mallit tarjosivat myös nopeuden (2.00"/sec kuormittamattomana) ja kompaktin koon, jotka sopivat tähän 6” iskun pituutta vaativaan sovellukseen.

LC-062 Arduino Due -mikrokontrolleri liittää kuusi toimilaitetta kahden MultiMoto Arduino -shieldin kanssa ja isäntätietokoneeseen USB-sarjaliitännällä. Koska Multimoto-korttimme pystyvät ohjaamaan enintään neljää itsenäistä kanavaa kerrallaan, projektin kuusi lineaarista toimilaitetta jaettiin kolmeen per kortti. Toimilaitteiden liikkeet ohjattiin sitten PID-palautejärjestelmällä käyttäen PA-14P:n potentiometrien lukemia tuloina.

Yhdessä räätälöidyn käyttöliittymän (GUI) kanssa kolme IR-lähetintä ja kahta kameraa hyödyntävä Leap Motion Controller mahdollistaa alustan täydellisen liikeohjauksen käden heilautuksella. Yksityiskohtaista Stewart-alustan esittelyä varten olemme liittäneet projektiraportin ja GitHub-linkit.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
Stewart-alustojen taustalla olevaa teknologiaa käytetään monissa nykyaikaisissa liikesimulaattoreissa niiden 6 vapausasteen (kolme sijainnille, kolme suunnalle) vuoksi – se on suurin vapausasteiden määrä, joka yhdellä jäykällä kappaleella voi olla. Laajamittainen esimerkki tästä on Cruden HexaPod -liikesimulaattori, joka hyödyntää kuutta vapausastettaan mahdollisimman tarkkojen ja toistettavien simulointien saavuttamiseksi.

Lentosimulaattori lineaarisilla toimilaitteilla

Teknologian kehittyessä liikesimulaattorit ovat vähitellen tulleet edullisemmiksi DIY-harrastajille ympäri maailmaa. Merkittävä esimerkki tästä on asiakkaamme Anthony Escalanten lentosimulaattoriprojekti. Räätälöidyillä osilla, elektroniikalla ja ohjelmoinnilla toteutetulla modulaarisella suunnittelullaan Anthony loi täysin toimivan Flight Motion Simulatorin kotiinsa.
Useisiin PA-03- ja PA-04- vakiotoimilaitteisiin perustuva suunnittelu tarjoaa 6 vapausastetta – kuten aiemmin mainittu Stewart-alusta. Jokaisella vakiotoimilaitteellamme oli riittävät nopeus- ja voimaluokitukset kallistusten, kiertojen ja käännösten hallintaan sulavasti Anthony’n liikealustalla todentamaan aidon lennon tuntua.

Neljän virtalähteen tukemana ohjausjärjestelmässä on riittävä virta moottoriohjaimille ja mikrokontrollereille, jotka on pakattu siististi simulaattorin ohjauskeskukseen.
„Se käy todella pehmeästi ja on helppo huoltaa,” Anthony sanoi. „Varmistin, että ratkaisu on huollettavissa moduuleittain. Osia sai helposti rautakaupoista ja metalliosat ostettiin ja leikattiin Metal Martissa. Toimilaitteet ja ripustus on helppo vaihtaa. Ei päänsärkyä seisokeista. Isoäitini voisi tehdä sen vaikka itse“.

Kiskolliset lineaariset toimilaitteet kuten PA-18 ja PA-08 ovat erinomaisia vaihtoehtoja sisäkäyttöisiin liikesimulaattoreihin, joissa vaaditaan ratkaisuja, joiden kokonaispituus pysyy kompaktina sekä sisään- että ulosajossa. Tämä johtuu siitä, että kiskollisissa toimilaitteissa liikerata on kiskon ennalta määritellyn polun sisällä – sen sijaan, että varsi työntyisi vapaaseen ilmaan.
Kaksitasosimulaattori lapsille

Liikesimulaattoreita käytetään myös viihteessä, kuten kaksitasosimulaattorissa lapsille, jonka toteutti EAA 485. Tämä projekti modernisoi alkuperäisen kolmen akselin simulaattorin, joka tunnetaan sisarkillasta Wetumpkassa, AL. EAA 485:n puheenjohtaja John McKiernan jakoi mielellään projektinsa kanssamme!
Kaksitasosimulaattori tarvitsi 4” iskun rulla- ja nousuakselille, ja koska kaartoakseli oli kääntölevyllä, kiinnityspisteen siirtäminen saattoi lisätä tai vähentää kaarron liikettä. Aiemman kokemuksensa perusteella McKiernan pystyi valitsemaan PA-03 24 V DC, 200 lb toimilaitteen 4” iskulla sopivaksi malliksi.
„Säätö vei alle päivän ja kaartoakseli saatiin toimimaan. Ostin sitten 3 identtistä toimilaitetta varalle. Rulla- ja nousuliikkeen aikaansaamiseksi piti koneistaa 4 alumiinipalikkaa Heim-laakerin asennusta varten. Heimin nivelet olivat tarpeen ottamaan vastaan aksiaaliliikettä rulla- ja nousutoiminnassa. Nämä tehtiin käsin ja tuntuivat toimivan hyvin. Myöhemmin tehtiin uusi sulaketaulu tavallisilla lattasulakkeilla – yksi kullekin toimilaitteelle, Hobbs-mittarille ja ohjaamolle. Ohjaamossa on oikeat lentomittarit ja erittäin oivaltava tähtimoottorin ääni, jota ohjataan kaasulla. Se käyttää radiolennokkien servotestereitä, jotka on kytketty moduuliin ja pieneen keskikaiuttimeen mittariston taakse. Siinä oli jopa realistinen konekivääriääni, kun painiketta painettiin,” McKiernan selittää.
McKiernan jatkaa: „Alkuperäiset kytkimet käyttivät jousirullaa, joka oli kepin tai polkimien ollessa neutraalissa fenolipalassa; kepin tai peräsinpolkimien liikuttaminen siirsi sen alumiiniselle kytkinlevylle. En pitänyt siitä, että keppi toimi sähkötienä, vaikka fenolipalikat eristivät alueen istuimen alle. Nämä kiinnitettiin ylösalaisin olevaan alumiinilevyyn ja sovitettiin olemassa olevan alkuperäisen kytkinrakenteen päälle.”
Pallo lepää kytkimen keskiasennossa neutraalina ja kepin tai polkimen liike rullaa ja painaa kytkintä. Alun perin pyöreä rullajärjestelmä vaati hieman hienosäätöä, koska varsinainen palikka piti viiltää, jotta kytkin saatiin sovitettua jalustaan. Muutamista haasteista huolimatta kaksitasosimulaattori „lenssi” 36 lasta KJKA AOPA -tapahtuman ensiesiintymisessään, ja McKiernan oli erittäin tyytyväinen lopputulokseen.
Tällaisten projektien ohjaus kytkimillä on aloittelijoille yksinkertaisempaa, eikä ohjelmointia tarvita. Mikrotoimilaitteemme ovat kompakteja ja sopivat täydellisesti prototyyppeihin tai pienoisjäljennöksiin vastaavista liikesimulaattoreista. Esittelyyn tehty proof-of-concept voi auttaa paljastamaan esteitä ennen täysikokoisen liikesimulaattorin toteutusta.
YHTEENVETO
Liikesimulaattoreita on monenlaisia muotoja ja kokoja, joten ne soveltuvat eri käyttötarkoitusten simulointiin. Mikro-ohjaimet, kytkimet ja moottoriohjaimet integroidaan usein lineaaristen toimilaitteiden kanssa, jotta liikesimulaattorit voivat toistaa liikettä mahdollisimman tarkasti.
Toivomme, että tämä oli yhtä informatiivinen ja mielenkiintoinen kuin meistä, erityisesti jos olit kiinnostunut siitä, miten liikesimulaattorit ja lineaariset toimilaitteet toimivat yhdessä! Jos sinulla on kysyttävää tai haluat keskustella tuotteistamme lisää, ota rohkeasti yhteyttä! Olemme alamme asiantuntijoita ja autamme mielellämme.
sales@progressiveautomations.com | 1-800-676-6123