



מדריך זה יעזור בהבנת הבקרות של בקר מנוע DC ללא מברשות כאשר הוא משולב עם ארדואינו ומפעיל ליניארי. ניתן להשתמש בתוכנית זו כדי להאריך ולסגור באופן רציף את מהלך המפעיל.
לפני שנתחיל, בואו נסקור את הרכיבים בהם נשתמש במדריך זה:
- ארדואינו מגה (ניתן להשתמש גם בארדואינו אונו).
- LC-241.
- PA-14 עם מנוע ללא מברשות.
- ספק כוח PS-13-12.
- חוטי מגשר.
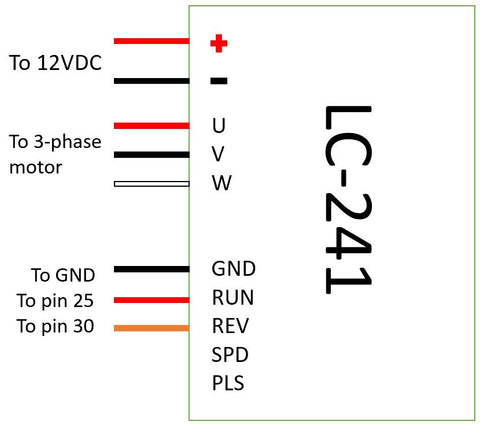
למפעיל הליניארי יש שני סטים של חוטים היוצאים ממנו, סט אחד מיועד למנוע והסט השני מיועד למתגי הגבול. הסכימה באיור למעלה מראה כיצד לחבר את הרכיבים יחד.
קוד הגדרת קוד סודי
int out_lim = 45; // פין מתג גבול חיצוני
int in_lim = 53; // פין פנימי של מתג גבול
int run_f = 25; // פין הפעלה בבקר
int run_r = 30; // פין הפוך בבקר
חלק זה של הקוד מטפל באתחול הפינים שישמשו לקבלה ולשליחה של נתונים. במקרה זה נעשה שימוש בכל הפינים הדיגיטליים, אך ניתן להשתמש גם בפינים אנלוגיים.
קוד לולאת הגדרת
הגדרת ריק () {
Serial.begin(9600); // אתחול תקשורת טורית ב-9600 סיביות לשנייה
pinMode(out_lim, INPUT_PULLUP); // מגדיר את פין 45 כפיני קלט
pinMode(in_lim, INPUT_PULLUP); // מגדיר את פין 53 כפיני קלט
pinMode(run_f, OUTPUT); // מגדיר את פין 25 כפין פלט
pinMode(run_r, OUTPUT); // מגדיר את פין 30 כפין פלט
retract(); // מבטל את הקו בעת ההפעלה
עיכוב (500);
}
לולאת ה-"setup" מגדירה אילו פינים ישמשו לפלט ואילו ישמשו לקלט. כפי שניתן לראות בקוד, פינים המחוברים למתגי גבול ישמשו לקריאת מצבי מתגי גבול ופינים המחוברים ל-"RUN" ו-"REV" ב-LC-241 ישמשו לכתיבה אליו. בתחילה, הקוד מפעיל גם פונקציית נסיגה כדי לסגת פנימה לחלוטין לפני ההתחלה.
הגדרות פונקציה קוד
void extend() // פונקציה זו מאפשרת למנוע לפעול
{
digitalWrite(run_f, נמוך);
digitalWrite(run_r, HIGH);
}
void retract() // פונקציה זו הופכת את כיוון המנוע
{
digitalWrite(run_f, נמוך);
digitalWrite(run_r, נמוך);
}
void run_stop() // פונקציה זו משביתה את המנוע
{
digitalWrite(run_f, HIGH);
digitalWrite(run_r, HIGH);
}
חלק זה מסביר את הפונקציות המשמשות לשליטה על עוצמת המנוע וכיוון המנוע. נפעיל או נכבה את המנוע על ידי כתיבת "0 inch או "1 inch לפין "RUN" ולאחר מכן את אותן פקודות לפין "REV" כדי להפוך את כיוון המנוע.
קוד לולאה ראשי
לולאת ריקנות () {
int out_lim_state = digitalRead(out_lim); // קורא את מתגי הגבול ושומר את ערכם
int in_lim_state = digitalRead(in_lim);
Serial.print("ערך מתג הגבול החיצוני"), Serial.println(out_lim_state); // 0 -> מתג הגבול נלחץ
Serial.print("ערך מתג הגבול הפנימי"), Serial.println(in_lim_state); // 1 -> מתג הגבול לא נלחץ
אם (out_lim_state == 0 ו- in_lim_state == 1) // אם מתג הגבול החיצוני לחוץ והפנימי לא (מורחב עד הסוף)
{
retract(); // לבטל את הקו
}
אחרת אם (out_lim_state == 1 ו- in_lim_state == 0) // אם מתג הגבול הפנימי נלחץ והחיצוני לא (נסוג עד הסוף)
{
extend(); // להאריך את הקו
}
לולאת ה"לולאה" בעצם קוראת את הקלטים ממתגי הגבול כדי לבדוק אם המתגים נלחצים או לא, ולאחר מכן על סמך זה היא פשוט משנה את כיוון המנוע.
רוב המפעילים הליניאריים בשוק מגיעים עם מנוע DC עם מברשות, ולכן מחזור העבודה הזמין עם מנוע זה הופך את ההפעלה הרציפה של היחידה לבלתי אפשרית במידה מסוימת. ב-Progressive Automations, אנו מעניקים ללקוחותינו את החופש לבחור במנוע DC ללא מברשות עבור דגם PA-14 שלנו, מה שנותן להם עוד יותר אפשרויות לפרויקטים שלהם.