Obstajata dve metodi krmiljenja več aktuatorjev – paralelna in sinhrona. Paralelno krmiljenje na vsak aktuator dovaja konstantno napetost, medtem ko sinhrono krmiljenje na vsak aktuator dovaja spremenljivo napetost.
Postopek sinhronizacije več aktuatorjev je potreben, kadar želimo, da se dva ali več aktuatorjev giblje z enako hitrostjo. To lahko dosežemo z dvema oblikama položajne povratne zveze – s senzorji Hallovega efekta in večobrati potenciometri.
Majhna odstopanja pri proizvodnji aktuatorjev povzročijo rahla odstopanja v hitrosti aktuatorja. To lahko odpravimo tako, da na aktuator dovajamo spremenljivo napetost in tako uskladimo hitrosti dveh aktuatorjev. Položajna povratna zveza je potrebna, da določimo, kolikšna napetost je potrebna za vsak aktuator.
Sinhronizacija aktuatorjev je pomembna, kadar upravljamo dva ali več aktuatorjev in potrebujemo natančen nadzor. Na primer pri aplikacijah, kjer morajo več aktuatorjev premikati obremenitev in hkrati ohranjati enakomerno porazdelitev obremenitve med vsakim aktuatorjem. Če bi v takšni aplikaciji uporabili paralelno krmiljenje, bi lahko zaradi različnih hitrosti hoda prišlo do neenakomerne porazdelitve obremenitve, kar bi na enega od aktuatorjev povzročilo preveliko silo.
Senzor Hallovega efekta
Če povzamemo teorijo Hallovega efekta: Edwin Hall (ki je odkril Hallov efekt) je zapisal, da kadar je magnetno polje uporabljeno v smeri, ki je pravokotna na tok električnega toka v prevodniku, se inducira napetostna razlika. To napetost lahko uporabimo za zaznavanje, ali je senzor v bližini magneta ali ne. S pritrditvijo magneta na gred motorja lahko senzorji zaznajo, kdaj je gred vzporedna z njimi.
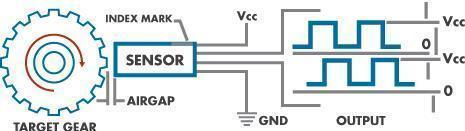
Z majhno tiskano vezno ploščo se te informacije lahko pretvorijo v kvadratni val, ki ga lahko štejemo kot zaporedje impulzov. S štetjem teh impulzov lahko spremljate, kolikokrat se je motor zavrtel in kako se motor giblje.

Nekatere ploščice s Hallovim efektom imajo na sebi več senzorjev. Običajno imajo 2 senzorja pod kotom 90 stopinj, kar daje kvadraturni izhod. S štetjem teh impulzov in z opazovanjem, kateri pride prvi, lahko določite smer vrtenja motorja. Lahko pa preprosto nadzorujete oba senzorja in dobite več štetij za natančnejši nadzor.
Sinhronizacijo prek povratne zveze senzorjev Hallovega efekta je mogoče doseči s krmilno enoto Progressive Automations PA-40 – sinhronizirano dvojno krmiljenje aktuatorjev s Hallovim efektom box.
Sinhronizacija s potenciometrom
Večobrati potenciometri, znani tudi kot reostati ali spremenljivi upori, zagotavljajo analogno predstavitev položaja aktuatorja. Senzor je pritrjen na zobniški sistem, povezan z motorjem, ki vrti potenciometer in tako sorazmerno z dolžino gibanja aktuatorja prilagaja upornost. Skupno spremembo upornosti/napetosti lahko izmerimo, da dobimo celoten merski razpon analogne vrednosti, ki predstavlja skupno razdaljo hoda aktuatorja. Potenciometri, uporabljeni v aktuatorjih Progressive Automations, so 10KΩ.
Za namene sinhronizacije se bere analogna vrednost vsakega potenciometra, program/krmilna enota pa lahko nato na tej osnovi določi potrebno izhodno napetost za vsak aktuator. Sinhronizacijo s potenciometrom je mogoče doseči z programiranjem mikrokrmilnika.
Pomen sinhronizacije
Na tej točki so metode sinhronizacije pojasnjene. Zdaj si oglejmo, zakaj je sinhronizacija pomembna. Ko je cilj uporabiti več aktuatorjev za potiskanje ali vlečenje obremenitve, moramo zagotoviti, da se aktuatorji premikajo z enako hitrostjo. Ta natančnost hitrosti aktuatorja je potrebna za zagotavljanje enakomerne porazdelitve obremenitve.Poglejmo primer aplikacije, ki zahteva potisno silo 700 lbs in dva aktuatorja. Za ta primer bomo uporabili dva PA-04 IP-66 linearna aktuatorja z nazivno silo 400 lbs vsak, prilagojena s senzorji HALL efekta za položajno povratno zvezo. Skupna dinamična nazivna sila obeh aktuatorjev, ko delujeta sinhrono, je 800 lbs. Potrebna sila za sistem je 700 lbs, zato je kombinirana nazivna sila aktuatorjev 800 lbs za to aplikacijo ustrezna.
Ker ta aplikacija uporablja dva aktuatorja za držanje želene obremenitve, je treba težo enakomerno porazdeliti med oba aktuatorja. Da zagotovimo enakomerno porazdelitev obremenitve, morata aktuatorja ohranjati enako višino – če enaka višina ni dosežena, bo eden od dveh aktuatorjev prevzel dodatno težo in bo izpostavljen navoru (ali bočni obremenitvi). Dodatna teža in navor lahko aktuatorja preobremenita, kar privede do okvare aktuatorja.
Končni krmilni elementi
Pomen sinhronizacije aktuatorjev je zagotoviti enakomerno gibanje več aktuatorjev in preprečiti okvare aktuatorjev.
Krmilna enota za Hallov efekt
Ko so aktuatorji prilagojeni s senzorji HALL efekta, se lahko za sinhronizacijo prek Hallovega efekta uporabi krmilna enota PA-40.
Arduino mikrokrmilnik
Uvedba krmiljenja aktuatorjev je mogoča z Arduino programiranjem. Prosimo, obiščite naslednje povezave za več informacij:
- Programiranje Arduina
- Sinhronizacija s Hallovim efektom
- Krmiljenje položaja s potenciometrom (povratna zveza)
Če imate dodatna vprašanja, se brez oklevanja obrnite na tehnično podporo in dobite takojšen odgovor.