



Съществуват два метода за управление на множество задвижващи механизми – паралелно и синхронно. Паралелното управление подава постоянно напрежение към всеки задвижващ механизъм, докато синхронното управление подава променливо напрежение към всеки задвижващ механизъм.
Процесът на синхронизиране на множество задвижващи механизми е необходимо при прилагането на два или повече задвижващи механизма, които да се движат с еднаква скорост. Това може да се постигне с две форми на позиционна обратна връзка – сензори на Хол и многооборотни потенциометри.
Леко отклонение в производителността на задвижващия механизъм води до леко отклонение в скоростта му. Това може да се коригира чрез подаване на променливо напрежение към задвижващия механизъм, за да се съобрази с две скорости на задвижващия механизъм. Позиционната обратна връзка е необходима, за да се определи какво напрежение е необходимо за подаване към всеки задвижващ механизъм.
Синхронизация на изпълнителните механизми е важно при управлението на два или повече задвижващи механизма, където е необходим прецизен контрол. Например, приложения, които биха изисквали множество задвижващи механизми за преместване на товар, като същевременно се поддържа равномерно разпределение на натоварването между всеки задвижващ механизъм. Ако в този тип приложение се използва паралелно управление, може да възникне неравномерно разпределение на натоварването поради променливите скорости на хода и в крайна сметка да се причини прекомерна сила върху един от задвижващите механизми.
Сензор за ефект на Хол
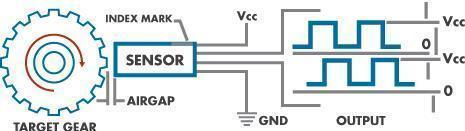
За да обобщим теорията за ефекта на Хол, Едуин Хол (който е открителят на ефекта на Хол) заявява, че когато се приложи магнитно поле в посока, перпендикулярна на потока на електрически ток в проводник, се индуцира разлика в напрежението. Това напрежение може да се използва за откриване дали сензорът е в близост до магнит или не. Чрез прикрепване на магнит към вала на двигателя, сензорите могат да открият кога валът е успореден на тях.
С помощта на малка платка тази информация може да бъде изведена като правоъгълна вълна, която може да се преброи като поредица от импулси. Чрез броене на тези импулси можете да следите колко пъти се е завъртял моторът и как се движи.

Някои платки с ефект на Хол имат множество сензори. Обичайна практика е те да имат 2 сензора на 90 градуса, което води до квадратурен изход. Чрез преброяване на тези импулси и определяне кой идва първи, можете да определите посоката на въртене на двигателя. Или можете просто да наблюдавате и двата сензора и да получите повече импулси за по-прецизен контрол.
Синхронизация чрез обратна връзка от сензора на Хол може да се постигне с прогресивни автоматизации PA-40 Синхронизирано управление на двоен задвижващ механизъм с ефект на Хол кутия.
Синхронизация на потенциометъра
Многооборотните потенциометри, известни още като реостати или променливи резистори, осигуряват аналогово представяне на позицията на задвижващия механизъм. Сензорът е фиксиран към зъбна предавка, прикрепена към двигателя, който завърта потенциометъра и следователно регулира номиналното съпротивление пропорционално на хода, извършен от задвижващия механизъм. Общата промяна на съпротивлението/напрежението може да бъде измерена, за да се получи пълният диапазон на аналоговата стойност, която представлява общия ход на задвижващия механизъм. Потенциометрите, използвани в задвижващите механизми на Progressive Automations, са 10KΩ.
За целите на синхронизацията се отчита аналоговата стойност на всеки потенциометър, която след това може да се използва от програма/контролен блок, за да се определи необходимото изходно напрежение към всеки изпълнителен механизъм. Синхронизацията на потенциометъра може да се постигне чрез микроконтролер програмиране.
Значение на синхронизацията
На този етап са обяснени методите за синхронизация. Сега искаме да разгледаме защо синхронизацията е важна. Когато е необходимо да се използват множество задвижващи механизми за бутане или дърпане на товар, трябва да се уверим, че задвижващите механизми са с прецизно съпоставими скорости. Тази прецизност в скоростта на задвижващите механизми е необходима, за да се осигури равномерно разпределение на товара.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two Линеен задвижващ механизъм PA-04 IP-66 with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Елементи за окончателен контрол
Значението на синхронизирането на задвижващите механизми се свежда до осигуряване на равномерно движение на множество задвижващи механизми и предотвратяване на повреда на задвижващите механизми.
Кутия за управление на ефекта на Хол
Когато задвижващите механизми са персонализирани със сензори с ефект на ХОЛ, контролна кутия PA-40 може да се използва за синхронизация на базата на ефекта на Хол.
Микроконтролер Arduino
Управлението на задвижващите механизми може да се осъществи чрез програмиране на Arduino. Моля, посетете следните връзки за повече информация:
- Кодиране на Ардуино
- Синхронизация на ефекта на Хол
- Контрол на позицията с обратна връзка от потенциометър
Ако имате допълнителни въпроси, не се колебайте да се свържете с инженерния отдел подкрепа и получете незабавния отговор.