




DC двигателите се използват широко както в промишлени приложения, така и в домашни условия за лични проекти. Едно от ключовите съображения при избора на DC двигател е дали да се свърже някаква форма на обратна връзка към двигателя.
Какво е обратна връзка?
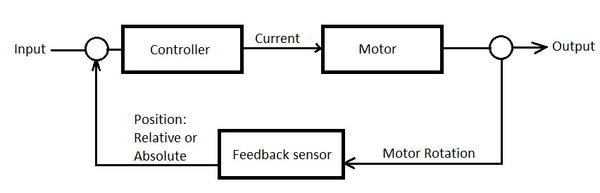
Обратната връзка се отнася до всяка информация, която контролерът може да използва за наблюдение на процес. При DC двигателите обратната връзка обикновено се събира под формата на позиция, брой завъртания и посока на въртене. Тази информация може да бъде предадена на контролера за измерване на ъгловата скорост и позицията на вала на двигателя. Това е известно като форма на „управление със затворен контур“.
В по-сложни случаи на употреба, обратната връзка от двигателя и други източници може да се контролира не само за постигане на точна скорост и позиция, но и за желания динамичен отговор, синхронизация и стабилност.
Предимства от използването на обратна връзка
Когато е правилно внедрена, обратната връзка може да позволи на машините да работят по-ефективно и с по-висока повторяемост. Обратната връзка може да позволи на вашия механизъм автоматично да регулира изхода, за да поддържа стабилност, да намали вариациите и да минимизира грешките, без да е необходима човешка намеса.
Един прост пример за добра система за управление с обратна връзка е термостатът. Контролерът измерва температурата в помещението и регулира мощността на нагревателните елементи, за да поддържа зададена температура.
Едно от ключовите предимства на обратната връзка при DC двигателите е PID управлението. PID се отнася до механизъм на управляваща верига, широко използван в индустрията за автоматично компенсиране на грешки в скоростта или позицията на машината.
Обратната връзка може да се използва и за внедряване на механизми за отказоустойчивост и отстраняване на проблеми с вашето приложение. Например, ако вашето линейни задвижващи механизми трябва да се движат синхронно, но единият изостава, нещо не е наред. Тогава системата може да спре движението на двата задвижващи механизма, за да предотврати повреда или накланяне.
Видове сензори за обратна връзка за DC двигатели
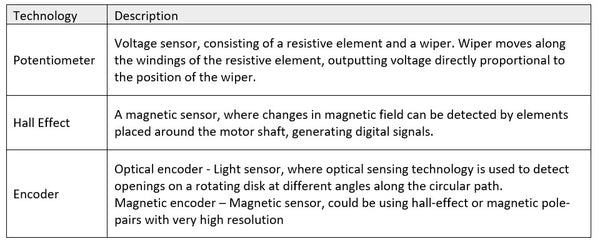
Най-често срещаните видове обратна връзка за DC двигатели са потенциометри, сензори на Хол и енкодери. Що се отнася до прецизността и точността, и трите вида могат да бъдат сравними и са много ефективни със съвременните технологии. Разликите се появяват, когато се вземат предвид специфични изисквания за производителност, като например издръжливост, фактори на околната среда, електромагнитни смущения и температурни характеристики.
Потенциометър
Най-голямото предимство на този тип обратна връзка е неговата простота. Потенциометърът ефективно превръща обикновен DC двигател в серво двигател, което позволява прецизно движение и/или контрол на скоростта. Потенциометрите предоставят директна информация за ъгловото положение на вала на двигателя. В резултат на това, когато системата загуби захранване, потенциометърът може да запази информацията за позицията си, без да е необходимо да се „връща в начално положение“. Освен това, тъй като потенциометрите в основата си са просто делители на напрежение с голям резистор, те са добри в справянето с електромагнитни смущения (EMI).
Съществуват и недостатъци, свързани с използването на потенциометри. Потенциометричните сензори изискват контакт, за да извършват измерванията, което означава, че те биха били по-малко издръжливи и биха имали ограничен полезен живот в сравнение с други форми на обратна връзка. Потенциометрите са сравнително бавна форма на измерване, както поради необходимостта от контакт, така и защото може да се нуждаят от аналогово-цифров преобразувател, преди да се установи действителното управление с обратна връзка. И накрая, потенциометрите в двигателите създават ограничение за броя завъртания, които валът може да направи. Приложенията с обратна връзка от потенциометри биха трябвало да гарантират, че има начин за предотвратяване на прекомерно изместване.
Ефект на Хол
Сензорите на Хол са основен елемент в обратната връзка за двигателите, защото са надеждни, прецизни и имат дълъг експлоатационен живот. За разлика от потенциометъра, сензорите на Хол не е необходимо да осъществяват контакт, така че са полезни в тежки условия, силно устойчиви на износване и надеждни в среда с високи удари. Сензорите на Хол осигуряват електрически импулси, когато магнитът е подравнен със сензорната електроника. Поради тази причина те са подходящи за високоскоростни приложения и позволяват предварително програмиране на определени ъгли на вала на двигателя.
Един от недостатъците на сензорите на Хол е, че те могат да предоставят само информация за относителното положение. Това означава, че всеки път, когато системата загуби захранване, сензорите на Хол трябва да бъдат преместени на известно място и нулирани. Освен това, проводниците на сензорите на Хол, пренасящи информация, могат да бъдат уязвими към електромагнитни смущения и шум. Поради тази причина сигналите понякога могат да бъдат загубени или да се генерират фалшиви сигнали, което означава, че информацията за положението може да се „отклонява“ с течение на времето.
Енкодер
Има оптични и магнитни енкодери. Магнитните енкодери са вероятно най-добрият сензор за генериране на сигнали за обратна връзкаТе са безконтактни, подобно на сензорите на Хол, което означава, че имат много дълъг експлоатационен живот. Много са бързи и обикновено имат много висока резолюция. Магнитните енкодери също не се влияят от прах или други частици и могат да се използват в различни среди.
Енкодерите обикновено са скъпи и изискват специална електроника, която може да бъде трудна за настройване и управление. Добавянето на ненужна сложност към дизайна не винаги е добра идея, защото би увеличило и броя на потенциалните режими на повреди.
Съществуват разнообразни форми на обратна връзка, достъпни за дизайнерите, и с напредъка на съвременните технологии, те могат да бъдат направени приблизително еквивалентни по отношение на точност. При избора на вида обратна връзка, човек трябва да вземе предвид нуждите от производителност на приложението си и да разбере предимствата на технологиите, с които работи.