
- Bevezetés a működtetők működésébe
- Pozicionális visszacsatolási mechanizmusok
- A működtetők vezérlőrendszereinek típusai
- Visszajelzés és hibajavítás
- Vezérlődobozok lineáris aktuátorokhoz
Bevezetés a működtetők működésébe
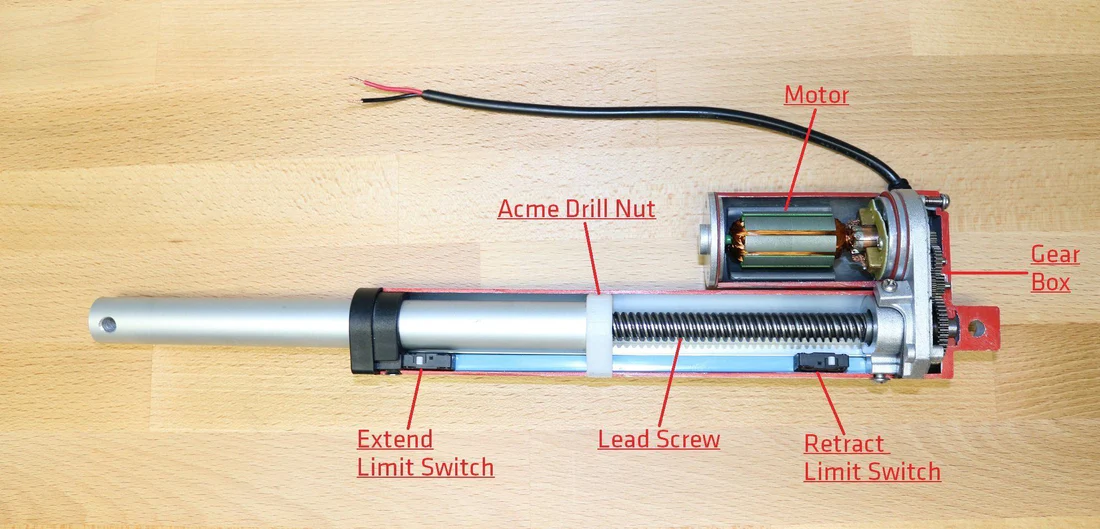
Be elektromos lineáris aktuátorok, elektromos áramot használnak forgó mozgás létrehozására egy elektromos motor amely mechanikusan kapcsolódik egy sebességváltóhoz, és egy lead
screw a működtető tengelyének egy CSÚCSPONT fúróanya lineáris mozgáshoz. A működtetők vezérlőrendszerei az évek során jelentősen fejlődtek, növelve ezen eszközök sokoldalúságát és funkcionalitását. A lineáris működtetők különféle eszközökkel és vezérlőmechanizmusokkal működtethetők, beleértve:
• Vezeték nélküli vezérlők – a felhasználók számára a távirányítás kényelmét kínálják, fizikai kábelek nélkül.
• Wi-Fi és Bluetooth-képes kontrollerek - lehetővé teszik az intelligens rendszerekbe való integrációt és a mobileszközökön keresztüli hozzáférést, felhasználóbarát felületeket és a beállítások távoli és pontos módosításának lehetőségét biztosítva.
Az aktuátortechnológia és a vezérlőrendszerek terén elért fejlesztések kiszélesítették alkalmazási körüket, nélkülözhetetlenné téve őket a modern automatizált rendszerekben. Legyen szó akár ablakok beállításáról... járművek, nehéz üzemben mezőgazdasági berendezések, vagy háztartási gépek automatizálásaAz aktuátorok továbbra is kulcsszerepet játszanak az elektromos jelek fizikai cselekvéssé alakításában.

Aktuátorok vezérlőrendszereinek megértése
Ezeknek a rendszereknek az elsődleges célja annak biztosítása, hogy az aktuátorok pontosan, hatékonyan és megbízhatóan működjenek az előre meghatározott paraméterek szerint. A vezérlőrendszerek jelentőségét az aktuátorok működésében nem lehet eléggé hangsúlyozni, különösen a pontos és hatékony mozgásvezérlés elérése tekintetében. Ezek a rendszerek több okból is kulcsfontosságúak:
1. Pontosság: A vezérlőrendszerek lehetővé teszik a működtető mozgások finomhangolását, hogy magas szintű ismételhetőséget és pontosságot érjenek el. Ez elengedhetetlen azokban az alkalmazásokban, ahol a pontos pozicionálás kritikus fontosságú, például a robotsebészetben vagy a repülőgépiparban.
2. Hatékonyság: Azáltal, hogy optimalizálják a működtetők parancsokra adott válaszát, a vezérlőrendszerek csökkentik az energiafogyasztást és minimalizálják a kopást. Ez nemcsak a működtető élettartamát hosszabbítja meg, hanem javítja a rendszer általános hatékonyságát is, amelyben működik.
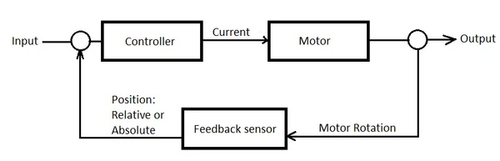
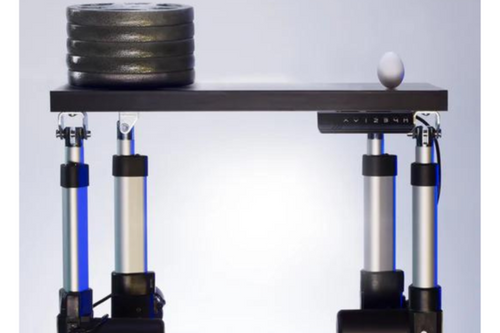
3. Alkalmazkodóképesség: A visszacsatoló mechanizmusok valós időben módosíthatják a kompatibilis működtetők viselkedését a kompatibilis működtetők pozíció-visszajelzésének elemzésével. Ez az alkalmazkodóképesség létfontosságú a dinamikus környezetekben, ahol a körülmények gyorsan változnak, például automatizált gyártási folyamatokban, vagy amikor több működtető egyenlőtlen súlyeloszlást tapasztal.
5. Biztonsági funkciók: A programozott biztonsági funkciók, mint például a túlterhelésvédelem, segítenek megelőzni a működtető vagy az alkalmazás károsodását azáltal, hogy leállítják a működést, miután a vezérlődoboz túlzottan magas áramfelvételt észlelt. A vezérlődobozokban található egy másik biztonsági funkció, a túlmelegedés elleni védelem, amely egy bizonyos ciklusidő után leállítja a működést, hogy biztosítsa a működtető működési ciklusán belüli maradását, így elkerülve a motor kiégését. A vezérlőrendszerek alapvető fontosságúak a működtetők működéséhez, biztosítva a szükséges intelligenciát és alkalmazkodóképességet a pontosság, a hatékonyság, a biztonság és a hatékony mozgásvezérlés biztosításához. Szerepük kulcsfontosságú az automatizálási technológia bővülő területén, ahol a mozgás pontossága gyakran a működési siker sarokköve.
A vezérlőrendszerek alkotóelemei és típusai
Egy alapvető vezérlődoboz főbb komponensei
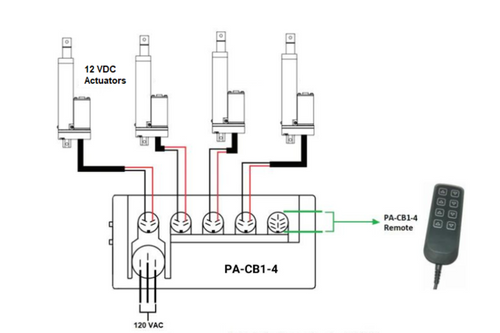
Egy elektromos lineáris aktuátorokhoz tervezett alapvető vezérlődobozban minden komponens kulcsfontosságú szerepet játszik a hatékony működés biztosításában. Íme a főbb alkatrészek, funkcióik és céljaik lebontása:1. Relék: A relék kapcsolóként működnek, amelyek alacsony teljesítményű jel segítségével vezérlik a nagy teljesítményű elektromos áramkört. A kétvezetékes aktuátorok kezelésére tervezett vezérlődobozoknál két relé elengedhetetlen a aktuátor két vezetékén keresztül alkalmazott feszültség polaritásának megfordításához, ami viszont megváltoztatja a mozgás irányát. Ez lehetővé teszi a kétirányú vezérlést egy egyszerű beállítással az aktuátor kinyújtásához és visszahúzásához.
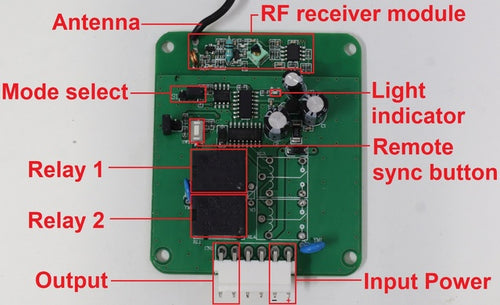
2. Bemeneti csatornák: A bemeneti csatornák interfészek, amelyeken keresztül a vezérlőrendszer elektromos jeleket fogad külső forrásokból, például tápegységekből vagy vezetékes távirányítókból. A pozíció-visszacsatolással működő vezérlődobozok bemenetet is kaphatnak egy aktuátor érzékelőitől. Ezek a csatornák feldolgozzák a felhasználótól és/vagy az érzékelőktől érkező bemeneteket, hogy meghatározzák, hogyan kell működnie az aktuátornak, így alapvető fontosságúak az aktuátor mozgásainak elindításához és vezérléséhez az adott követelmények alapján. 3. Kimeneti csatornák: A kimeneti csatornák vezérlőjeleket továbbítanak a vezérlőtől az aktuátorhoz vagy más alkatrészekhez, például relékhez. A pozíció-visszacsatolással működő vezérlődobozok elektromos áramot is kiadhatnak, hogy az aktuátor érzékelői rendelkezzenek a működéshez szükséges árammal. Ezek a csatornák kulcsfontosságúak a vezérlőrendszer által meghatározott parancsok végrehajtásához, közvetlenül befolyásolva az aktuátor viselkedését. 4. Távoli szinkronizáló gomb: Ez a gomb a vezérlőrendszer és a távirányító eszköz szinkronizálására szolgál. Biztosítja, hogy a távoli bemeneteket a vezérlőrendszer felismerje és feldolgozza, megkönnyítve a kényelmes és rugalmas működést távolról. 5. Fényjelző: A fényjelzők vizuális visszajelzést adnak a rendszer állapotáról. Lehetnek egy jelző a be-/kikapcsoláshoz, az üzemmódokhoz, a hibaállapotokhoz vagy a jelvételhez, amely segít a rendszer monitorozásában és hibaelhárításában komplex diagnosztikai eszközök nélkül. 6. Módválasztás: Ez a funkció lehetővé teszi a felhasználó számára, hogy a vezérlődoboz különböző üzemmódjai között váltson, például pillanatnyi vagy nem pillanatnyi vezérlések között. Pillanatnyi módban a távirányító gombját folyamatosan aktív helyzetben kell tartani ahhoz, hogy az eszköz működjön. A kapcsoló elengedése után az eszköz leáll. A nem pillanatnyi mód úgy működik, mint egy kapcsoló, amely a legutóbbi beállított helyzetben marad, amíg újra meg nem változtatják, függetlenül attól, hogy megnyomják-e. Ez azt jelenti, hogy aktiválás után az eszköz tovább működik, amíg a kapcsolót manuálisan ki nem kapcsolják. 7. Antenna: Az antenna a vezeték nélküli kommunikációs beállítással rendelkező vezérlődobozok része. Az antennákat a vezérlőrendszer és a távirányító eszközök közötti, vagy az összekapcsolt rendszerek közötti jeltartomány és minőség javítására használják. Elengedhetetlen a robusztus kommunikáció fenntartásához olyan környezetben, ahol a közvetlen kábelezés nem praktikus vagy nemkívánatos. 8. RF vevőmodul: Ez a modul a vezeték nélküli távirányítók által küldött rádiófrekvenciás jeleket fogadja. Ezeket a jeleket cselekvésre késztető parancsokká dekódolja, amelyeket a vezérlőrendszer megért és végrehajt. Az RF vevőmodul elengedhetetlen a vezeték nélküli vezérlési beállításokhoz, lehetővé téve a működtető fizikai érintkezés nélküli távoli működtetését. Ezek az alkatrészek együttesen egy átfogó vezérlőrendszert alkotnak a 2 vezetékes működtetőkhöz, amelyek mindegyike egy meghatározott funkciót lát el, amely hozzájárul a működtető működésének általános hatékonyságához és eredményességéhez. Ez a rendszer nemcsak a működtető mozgásának pontos vezérlését teszi lehetővé, hanem javítja a felhasználói felületet és az interakciót is, így széles körű alkalmazásokhoz adaptálható.
Pozicionális visszacsatolási mechanizmusok
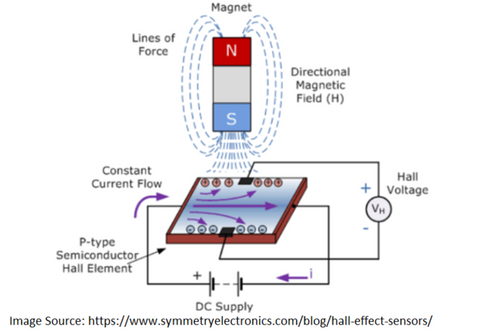
Hall-effektus-érzékelők
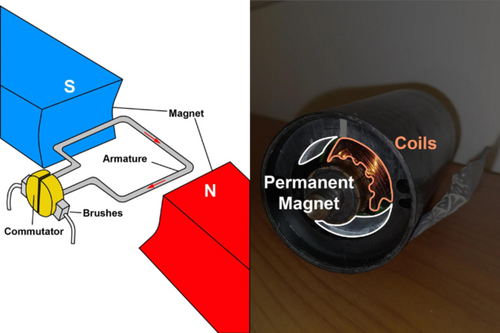
A Hall-effektus elméletét Edwin Hall (a Hall-effektus felfedezője) állította, hogy amikor egy vezetőben az elektromos áram áramlására merőleges irányban mágneses mezőt alkalmazunk, feszültségkülönbség indukálódik. Ez a feszültség felhasználható annak kimutatására, hogy egy Hall-effektus-érzékelő mágnes közelében van-e.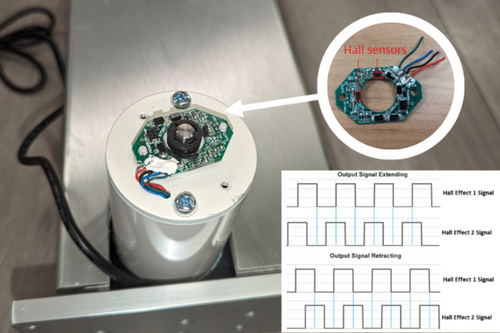
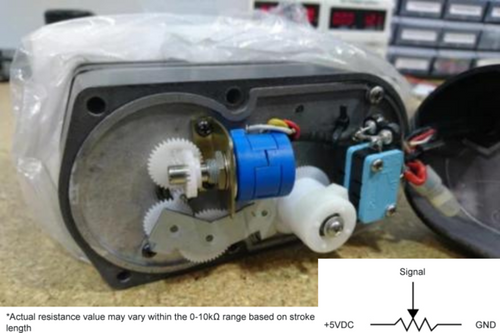
Potenciométerek
A potenciométer változtatható ellenállást biztosít, amely arányos a működtető helyzetével. A potenciométer gombja és a működtető forgó motorja között gyakran fogaskerekek vannak összekapcsolva. Ahogy a működtető mozog, az ellenállás értéke változik, amely mérhető és pozícióadatokká alakítható. Ezt az információt ezután egy vezérlőrendszer használja fel a működtető helyzetének finombeállítására, növelve a pontosságot.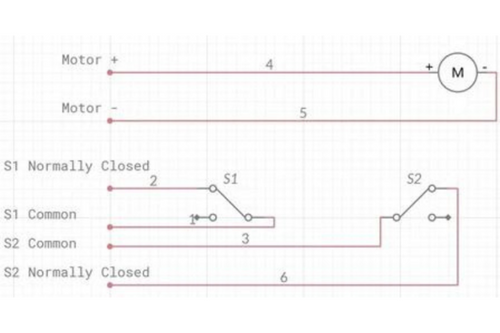
Végálláskapcsoló visszajelzése
A végálláskapcsoló-visszacsatoló jelek célja, hogy a rendszer megállapíthassa, hogy a működtető fizikailag kioldotta-e a belső végálláskapcsolókat. Ez a fajta visszacsatolás egyszerű és hasznos azokban az alkalmazásokban, amelyek elsősorban csak arra vonatkozóan igényelnek információt, hogy a működtető elérte-e a teljesen kinyújtott vagy teljesen behúzott helyzetet.A működtetők vezérlőrendszereinek típusai
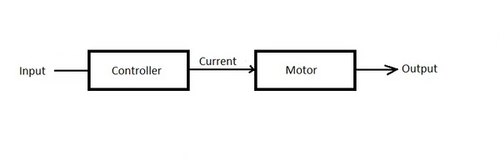
Egy egyszerű nyílt hurkú rendszerre példaként említhető egy pillanatkapcsoló, amely egy lineáris aktuátorhoz van csatlakoztatva. Ehhez a kezelőnek fizikailag meg kell nyomnia és lenyomva kell tartania a kapcsolót ahhoz, hogy az aktuátor folytassa a ciklust, és ha a kapcsolót elengedi, mielőtt az aktuátor elérné a végpontját, az a aktuátor mozgásának félúton történő leállását eredményezi.
A vezérlőrendszer és alkotóelemeinek megválasztása jelentősen befolyásolja a működtetők funkcionalitását és teljesítményoptimalizálását. Hatékony visszacsatolási mechanizmusok integrálásával és a megfelelő vezérlőrendszer-típus kiválasztásával a működtetők széles körű alkalmazásokhoz optimalizálhatók, biztosítva mind a pontosságot, mind a megbízhatóságot működésük során.
Visszajelzés és hibajavítás
A vezérlőrendszerek által korrigált változók
1. Pozíció: A vezérlőrendszerek segítenek biztosítani, hogy az aktuátor pontosan elérje és tartsa a kívánt pozíciót azáltal, hogy összehasonlítják a felhasználó pozícióját a pozíció-visszacsatolási érzékelők által leolvasott tényleges pozícióval. Ilyen például, amikor álló íróasztalnál dolgozó felhasználók megnyomják a vezérlő gombját, hogy az aktuátorok egy adott előre beállított memóriapozícióba mozogjanak, hogy munkaterületüket ülő magasságból álló magasságba állítsák.
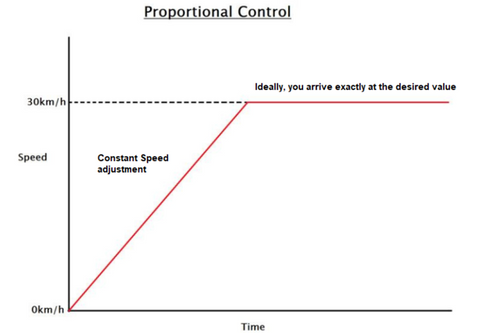
2. Sebesség: A pozíció-visszacsatolás leolvasása és a megtett távolság elosztása az eltelt idővel a haladási sebességet eredményezi. Egyes vezérlőrendszerek lehetővé teszik a PWM (impulzusszélesség-moduláció) segítségével állítható sebességbeállításokat, lehetővé téve az aktuátor számára, hogy az alkalmazás igényei alapján különböző sebességgel mozogjon. Ez olyan alkalmazásokban hasznos, ahol változó sebességekre van szükség, például a repülőgép-szimulátorok mozgását hajtó aktuátoroknál.
3. Erő: Bizonyos vezérlőrendszerek szabályozhatják az aktuátorok által kifejtett erő mértékét, biztosítva, hogy az biztonságos határokon belül működjön, és megakadályozza a rendszer vagy a környező alkatrészek károsodását. Az elektromos áramfelvétel mérésével a vezérlőrendszerek hozzávetőlegesen fel tudják mérni, hogy a lineáris aktuátorok mekkora erőt fejtenek ki. Ez a funkció hasznos azoknál a lineáris aktuátoroknál, amelyek ablakokat nyitnak és zárnak, hogy kikapcsolják az áramellátást és leállítsák az erő alkalmazását, ha egy személy keze vagy akadály akadályozza a mozgás útját.
Az ellenőrzési stratégiák típusai
A megfelelő vezérlőrendszer kiválasztása
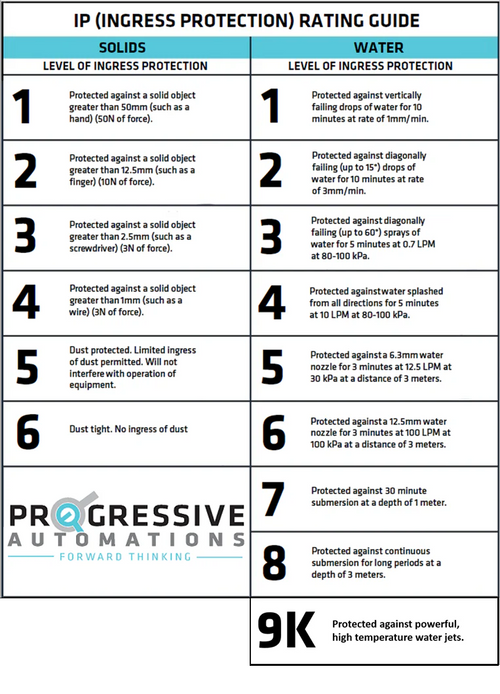
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Hall-effektus típusú vezérlődobozok
További információkért olvassa el blogbejegyzésünket az FLTCON vezérlődobozok alkalmazásairól.
