















Adatlapokat, felhasználói kézikönyveket, 3D modelleket, kapcsolási rajzokat és sok mást kínálunk. Erőforrás és Tanulási Központ szakaszok.

Yes, the L shaped standing desk is orientation-friendly and can be installed by your preference. Here is a step-by-step article that explains how this is possible: FLT-05 Felhasználói kézikönyv
MEGJEGYZÉS: Az alábbi lépések a távirányító modelljétől függően eltérőek lehetnek. A következő utasítások a standard RT-11 távirányítóhoz készültek. A keret maximális magasságának beállításához lépjen a kívánt magasságra, és kövesse az alábbi lépéseket:
- Nyomja meg az M gombot, és nézze meg a kijelzőn az [5 -] jelzést
- Nyomja meg a FEL gombot, és figyelje meg, hogy az [5 -] villog-e
- Tartsa lenyomva az M gombot, amíg a kijelzőn meg nem jelenik a [999] felirat.
- A maximális magasság most be van állítva
A keret minimális magasságának beállításához lépjen a kívánt magasságra, és kövesse az alábbi lépéseket:
- Nyomja meg az M gombot, és nézze meg a kijelzőn az [5 -] jelzést
- Nyomja meg a LE gombot, és figyelje meg, hogy az [5 -] villog-e
- Tartsa lenyomva az M gombot, amíg a kijelzőn meg nem jelenik a [000]
- A minimális magasság most be van állítva
A korlátok visszaállításához kövesse az alábbi lépéseket:
- Nyomja meg az M gombot, és nézze meg a kijelzőn az [5 -] jelzést, majd engedje el
- Fogd meg az M betűt, amit látsz [555]
- A korlátok visszaálltak
MEGJEGYZÉS: Az alábbi lépések a távirányító modelljétől függően eltérőek lehetnek. A következő utasítások a standard RT-11 távirányítóhoz készültek.
Ha a távirányító gombjait lenyomva kell tartania az előre beállított magasság eléréséhez, az azt jelenti, hogy a vezérlődoboz pillanatnyi vezérlésű módban van. A távirányító nem pillanatnyi módba állításához kövesse az alábbi lépéseket.
- Győződjön meg róla, hogy nincs semmi az asztala alatt, mivel el kell kezdenünk az alaphelyzetbe állítási folyamatot.
- Nyomja meg és tartsa lenyomva a LE gombot, amíg a kijelzőn meg nem jelenik az [ASr] felirat.
- Miután az [ASr] megjelenik, nyomja meg és tartsa lenyomva az [1] gombot, és két értéket láthat:
a. 10.1 = Nem pillanatnyi üzemmód
b. 10.2 = Pillanatnyi mód
- A visszaállítási folyamat befejezéséhez tartsa lenyomva a LE gombot, amíg az álló íróasztal kissé le nem ereszkedik és fel nem emelkedik.
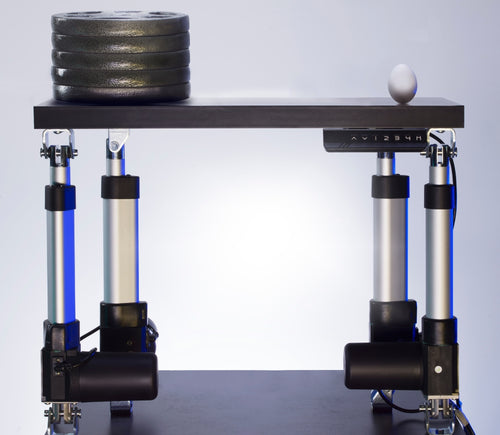
Állóasztalaink 3 ütközésérzékelési beállítással rendelkeznek, és ezt az Ön preferenciái szerint állíthatja be. A folytatáshoz kövesse az alábbi lépéseket:
- Győződjön meg róla, hogy nincs semmi az asztala alatt, mert el kell kezdenünk az alaphelyzetbe állítási folyamatot.
- Nyomja meg és tartsa lenyomva a LE gombot, amíg a kijelzőn meg nem jelenik az [ASr] felirat.
- Miután megjelent az [ASr] felirat, nyomja meg és tartsa lenyomva az UP [ ^ ] gombot, mire három érték jelenik meg:
a. 10,5 = 11 font
b. 10,6 = 22 font
kb. 10,7 = 33 font
- A visszaállítási folyamat befejezéséhez tartsa lenyomva a LE gombot, amíg az álló íróasztal kissé le nem ereszkedik és fel nem emelkedik.
Íme néhány hibaelhárítási lépés, amit megtehet, ha az alábbi hibakódok bármelyikét látja az FLTCON sorozatú vezérlődobozokkal ellátott kereteken:
Ellenőrizze a hibakódot itt.
Ha a probléma a fenti lépések végrehajtása után is fennáll, kérjük, vegye fel a kapcsolatot műszaki termékmérnökeinkkel a következő címen: 1-800-676-6123, vagy küldjön nekünk egy e-mailt a következő címre: sales@progressiveautomations.com.