




Gelijkstroommotoren worden veel gebruikt, zowel in industriële toepassingen als thuis voor persoonlijke projecten. Een van de belangrijkste overwegingen bij de keuze voor een gelijkstroommotor is of er een vorm van terugkoppeling aan de motor wordt gekoppeld.
Wat is terugkoppeling?
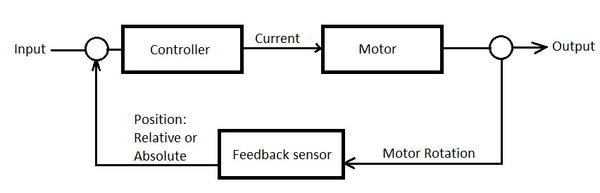
Terugkoppeling verwijst naar alle informatie die een regelaar kan gebruiken om een proces te bewaken. Bij gelijkstroommotoren wordt de terugkoppeling meestal verzameld in de vorm van positie, aantal omwentelingen en draairichting. Deze informatie kan vervolgens aan de regelaar worden doorgegeven om de hoeksnelheid en de positie van de motoras te meten; dit staat algemeen bekend als een vorm van “gesloten‑lusregeling”.
In meer geavanceerde toepassingen kan de terugkoppeling van de motor en andere bronnen worden aangestuurd om niet alleen een nauwkeurige snelheid en positie te bereiken, maar ook de gewenste dynamische respons, synchronisatie en stabiliteit.
Voordelen van het gebruik van terugkoppeling
Wanneer dit correct wordt geïmplementeerd, kan terugkoppeling machines efficiënter laten werken en met een hogere herhaalbaarheid. Terugkoppeling kan je mechanisme in staat stellen de uitvoer automatisch aan te passen om stabiliteit te behouden, variaties te verminderen en fouten te minimaliseren zonder menselijke tussenkomst.
Een eenvoudig voorbeeld van een goed terugkoppelingsregelsysteem is de thermostaat. De regelaar meet de temperatuur in de kamer en past de output van de verwarmingselementen aan om een ingestelde temperatuur te handhaven.
Een van de belangrijkste voordelen van terugkoppeling bij gelijkstroommotoren is PID‑regeling. PID verwijst naar een regelkringmechanisme dat in de industrie veel wordt gebruikt om automatisch fouten in de snelheid of positie van de machine te compenseren.
Terugkoppeling kan ook worden gebruikt om failsafe‑mechanismen te implementeren en je toepassing te troubleshooten. Als je lineaire actuatoren bijvoorbeeld synchroon zouden moeten bewegen maar er één achterblijft, is er iets mis. Het systeem kan dan de beweging van beide actuatoren stoppen om schade of kantelen te voorkomen.
Soorten terugkoppelingssensoren voor gelijkstroommotoren
De meest voorkomende vormen van terugkoppeling voor gelijkstroommotoren zijn potentiometers, Hall‑effectsensoren en encoders. Wat precisie en nauwkeurigheid betreft, kunnen alle drie de typen vergelijkbaar zijn en zijn ze met moderne technologie zeer effectief. De verschillen ontstaan wanneer specifieke prestatie-eisen worden bekeken, zoals duurzaamheid, omgevingsfactoren, elektromagnetische interferentie en gedrag bij verschillende temperaturen.
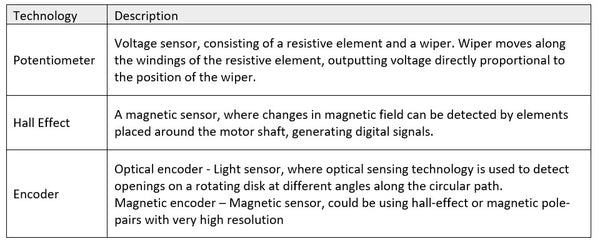
Potentiometer
Het grootste voordeel van dit type terugkoppeling is de eenvoud. Een potentiometer verandert een gewone gelijkstroommotor effectief in een servomotor, waardoor nauwkeurige beweging en/of snelheidsregeling mogelijk is. Potentiometers geven directe informatie over de hoekpositie van de motoras. Daardoor kan de potentiometer, wanneer het systeem spanningsloos raakt, zijn positiestatus behouden zonder te hoeven “refereren”. Bovendien zijn potentiometers in de kern gewoon spanningsdelers met een grote weerstand, waardoor ze goed bestand zijn tegen elektromagnetische interferentie (EMI).
Er zijn ook nadelen verbonden aan het gebruik van potentiometers. Potentiometersensoren moeten contact maken om metingen te doen, wat betekent dat ze minder duurzaam zijn en een beperkte levensduur hebben vergeleken met andere vormen van terugkoppeling. Potentiometers zijn een relatief trage vorm van meting, zowel door de noodzaak van contact als omdat ze mogelijk een analoog‑naar‑digitaalomzetter nodig hebben voordat daadwerkelijke terugkoppelingsregeling kan worden toegepast. Tot slot creëren potentiometers in motoren een beperking op het aantal omwentelingen dat een as kan maken. Toepassingen met potentiometer‑terugkoppeling moeten ervoor zorgen dat er een manier is om te voorkomen dat er te ver wordt bewogen.
Hall‑effect
Hall‑effectsensoren zijn een pijler van motor‑terugkoppeling omdat ze betrouwbaar, nauwkeurig en duurzaam zijn. In tegenstelling tot de potentiometer hoeven Hall‑effectsensoren geen contact te maken, waardoor ze nuttig zijn in zware omgevingen, zeer slijtvast en betrouwbaar bij hoge schokken. Hall‑effectsensoren leveren elektrische pulsen wanneer de magneet is uitgelijnd met de detectie‑elektronica. Daarom zijn ze geschikt voor hogesnelheidstoepassingen en maken ze het mogelijk bepaalde hoeken van de motoras vooraf te programmeren.
Een van de nadelen van Hall‑effectsensoren is dat ze alleen relatieve positiestatus kunnen geven. Dit betekent dat elke keer dat het systeem spanningsloos raakt, de Hall‑effectsensoren naar een bekende positie moeten worden bewogen en opnieuw moeten worden ingesteld. Daarnaast kunnen de draden van Hall‑effectsensoren die informatie vervoeren kwetsbaar zijn voor elektromagnetische interferentie en ruis. Hierdoor kunnen signalen soms verloren gaan of kunnen er valse signalen ontstaan, waardoor de positiestatus in de loop van de tijd kan “driften”.
Encoder
Er zijn optische en magnetische encoders. Magnetische encoders zijn waarschijnlijk de beste algehele sensor voor het genereren van terugkoppelingssignalen. Ze werken contactloos, net als de Hall‑effectsensoren, wat betekent dat ze een zeer lange levensduur hebben. Ze zijn erg snel en hebben doorgaans een zeer hoge resolutie. Magnetische encoders worden bovendien niet beïnvloed door stof of andere deeltjes en kunnen in uiteenlopende omgevingen worden gebruikt.
Encoders zijn doorgaans duur en vereisen speciale elektronica die lastig kan zijn om in te stellen en te besturen. Onnodige complexiteit aan het ontwerp toevoegen is niet altijd een goed idee, omdat dit ook het aantal potentiële faalmodi vergroot.
Er zijn uiteenlopende vormen van terugkoppeling beschikbaar voor ontwerpers en met de vooruitgang in moderne technologie kunnen ze qua nauwkeurigheid ruwweg equivalent worden gemaakt. Bij het kiezen van het type terugkoppeling moet je de prestatie‑eisen van je toepassing overwegen en de voordelen begrijpen van de technologieën waarmee je werkt.