



Há dois métodos de controle de múltiplos atuadores – paralelo e síncrono. O controle paralelo fornece uma tensão constante para cada atuador, enquanto o controle síncrono fornece uma tensão variável para cada atuador.
O processo de sincronização de múltiplos atuadores é necessário ao implementar dois ou mais atuadores para se moverem na mesma velocidade. Isso pode ser alcançado com duas formas de feedback posicional – sensores de Efeito Hall e potenciômetros de múltiplas voltas.
Pequenas variações na fabricação dos atuadores resultam em pequenas variações na velocidade do atuador. Isso pode ser corrigido aplicando uma tensão variável ao atuador para igualar as velocidades de dois atuadores. O feedback posicional é necessário para determinar quanta tensão deve ser fornecida a cada atuador.
A sincronização de atuadores é importante ao controlar dois ou mais atuadores quando é necessário um controle preciso. Por exemplo, aplicações que exigem múltiplos atuadores para mover uma carga mantendo uma distribuição de carga igual em cada atuador. Se o controle paralelo fosse usado nesse tipo de aplicação, pode ocorrer distribuição desigual de carga devido a velocidades de Recorrido variáveis e, em última instância, causar força excessiva em um dos atuadores.
Sensor de Efeito Hall
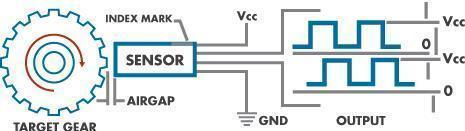
Para resumir a teoria do Efeito Hall, Edwin Hall (quem descobriu o Efeito Hall) afirmou que sempre que um campo magnético é aplicado em uma direção perpendicular ao fluxo de corrente elétrica em um condutor, é induzida uma diferença de tensão. Essa tensão pode ser usada para detectar se o sensor está próximo de um ímã ou não. Ao acoplar um ímã ao eixo do motor, os sensores podem detectar quando o eixo está paralelo a eles.
Usando uma pequena placa de circuito, essas informações podem ser fornecidas como uma onda quadrada, que pode ser contada como uma sequência de pulsos. Contando esses pulsos, você pode acompanhar quantas vezes o motor girou e como o motor se move.

Algumas placas de circuito de Efeito Hall possuem múltiplos sensores. É comum terem 2 sensores a 90 graus, o que resulta em uma saída em quadratura. Contando esses pulsos e vendo qual chega primeiro, você consegue identificar a direção em que o motor está girando. Ou você pode simplesmente monitorar ambos os sensores e obter mais contagens para um controle mais preciso.
A sincronização via Feedback de sensor de Efeito Hall pode ser obtida com a PA-40 – caixa de controle de Atuador com Efeito Hall duplo sincronizado da Progressive Automations.
Sincronização por potenciômetro
Potenciômetros de múltiplas voltas, também conhecidos como reostatos ou resistores variáveis, fornecem uma representação analógica da posição de um atuador. O sensor é fixado a um sistema de Engrenagem conectado ao motor que gira o potenciômetro e, portanto, ajusta o valor de resistência proporcionalmente à quantidade de Recorrido que o atuador realizou. A variação total de resistência/tensão pode ser medida para obter a faixa em escala total do valor analógico que representa a distância total de Recorrido do atuador. Os potenciômetros usados nos atuadores da Progressive Automations são de 10KΩ.
Para fins de sincronização, o valor analógico de cada potenciômetro é lido, e então um programa/caixa de controle pode usar esse valor para determinar a saída de tensão necessária para cada atuador. A sincronização por potenciômetro pode ser obtida por meio de programação de microcontrolador.
Importância da sincronização
Neste ponto, os métodos de sincronização foram explicados. Agora queremos analisar por que a sincronização é importante. Quando o objetivo é usar múltiplos atuadores para empurrar ou puxar uma carga, precisamos garantir que os atuadores correspondam precisamente às velocidades. Essa precisão na velocidade do atuador é necessária para assegurar uma distribuição igual da carga.Vamos analisar uma aplicação que exige uma força de empuxo de 700 libras e dois atuadores. Para este exemplo, usaremos dois Atuadores lineares PA-04 IP-66 com classificação de força de 400 libras cada, personalizados com sensores de Efeito Hall para feedback posicional. A classificação de força dinâmica combinada dos dois atuadores, quando usados em sincronia, é de 800 libras. A força necessária para o sistema é de 700 libras, portanto a classificação de força combinada de 800 libras seria aceitável para esta aplicação.
Como esta aplicação usa dois atuadores para sustentar a carga desejada, o peso deve ser distribuído uniformemente entre os dois atuadores. Para garantir uma distribuição uniforme da carga, os atuadores devem manter a mesma altura – se a mesma altura não for alcançada, um dos dois atuadores suportará peso adicional e sofrerá torque (ou carga lateral). O peso e o torque adicionais podem sobrecarregar os atuadores, resultando em falha do atuador.
Elementos finais de controle
A importância de sincronizar atuadores se resume a garantir o movimento uniforme de múltiplos atuadores e a prevenir falhas dos atuadores.
Caixa de controle de Efeito Hall
Quando os atuadores são personalizados com sensores de Efeito Hall, a caixa de controle PA-40 pode ser usada para fins de sincronização por Efeito Hall.
Microcontrolador Arduino
A implementação do controle de atuador pode ser realizada por meio de programação em Arduino. Por favor, visite os links a seguir para mais informações:
- Programação em Arduino
- Sincronização por Efeito Hall
- Controle de posição com Feedback de potenciômetro
Se você tiver quaisquer perguntas adicionais, não hesite em entrar em contato com o suporte de engenharia para obter uma resposta imediata.