Onde posso encontrar mais informações sobre seus produtos?
Como posso determinar qual atuador linear da Progressive Automations é o mais adequado para minha aplicação?
Dependendo da sua aplicação, há diferentes requisitos de especificação que você deve considerar ao determinar o atuador linear de que precisa. Esses requisitos incluem força, recorrido, velocidade e dimensões de montagem. Para obter informações detalhadas do atuador, você pode consultar a folha de dados ou a tabela de especificações localizada na página do produto do atuador selecionado. Você também pode entrar em contato conosco para falar com um de nossos engenheiros especialistas.
O que é ciclo de trabalho e como é calculado?
Ciclo de trabalho é a fração do período de trabalho em que um atuador linear pode permanecer ativo. Você pode calcular o ciclo de trabalho de um atuador linear usando a seguinte equação: Ciclo de trabalho (%) = (Tempo em que o atuador linear está ativo) / (Tempo de um período de trabalho)
Por exemplo: com um ciclo de trabalho de 25%, um atuador pode operar por 5 minutos continuamente antes de precisar descansar por 15 minutos antes de voltar a operar.
Posso usar os seus atuadores para substituir o atuador que já tenho?
Sim, nossos atuadores podem ser substituições perfeitas para a maioria das aplicações. Por favor, entre em contato conosco se não tiver certeza de qual atuador escolher. Você precisará saber a tensão nominal, a força nominal e o comprimento do Recorrido necessários antes que possamos recomendar um atuador de reposição.
O que significa Recorrido? Como saber qual tamanho escolher?
Recorrido é a distância de deslocamento da haste extensível. Para encontrar o comprimento do recorrido de que você precisa, meça sua aplicação da posição totalmente recolhida até a posição totalmente estendida. A diferença será igual ao comprimento do recorrido necessário.
Como sei qual classificação de força é adequada para a minha aplicação?
Posso usar minha própria fonte de alimentação para meus atuadores?
Como posso controlar os atuadores para que se movam ao mesmo tempo?
Para alcançar o controle de movimento síncrono, você precisará de Feedback. Oferecemos Feedback na forma de interruptores de fim de curso internos, potenciômetros ou sensores de efeito Hall. O artigo a seguir destaca alguns produtos da Progressive Automations que podem ser usados para controle sincronizado: Controlando múltiplos atuadores lineares ao mesmo tempo
Por que meu atuador linear está fazendo tanto barulho?
Há várias razões pelas quais seu atuador linear pode estar gerando muito ruído, incluindo força excessiva, carga lateral ou possível infiltração de água. No entanto, também pode ser que seu atuador seja simplesmente um atuador de alta força e, portanto, apresente um nível de ruído operacional elevado. Para saber como possivelmente reduzir esse ruído alto, clique aqui. Se você estiver preocupado que possa haver um problema com seu atuador, entre em contato conosco.
Posso personalizar um atuador linear conforme minhas especificações?
A maioria de nossos atuadores lineares está disponível para personalização. Consulte a folha de dados do produto desejado para ver todas as capacidades das opções de personalização. Observe que haverá um prazo de aproximadamente 20 – 25 dias úteis para produção, excluindo o tempo de envio. Também haverá uma taxa adicional para cada atuador que for modificado. Para saber mais sobre pedidos personalizados, entre em contato conosco pelo 1800 – 676 – 6123.
Posso sincronizar meus atuadores lineares?
Há kits de atuadores lineares disponíveis?
No momento, não temos kits disponíveis. No entanto, se você quiser uma recomendação sobre a compatibilidade de determinados atuadores lineares com sistemas de controle, envie-nos um e-mail para sales@progressiveautomations.com com as seguintes informações:
• Tensão nominal necessária
• Comprimento do Recorrido necessário
• Força nominal necessária
• Limitações dimensionais da sua aplicação
• Descrição da sua aplicação na qual o(s) atuador(es) será(ão) instalado(s)
A temperatura afetará meu atuador linear?
A temperatura pode ser um fator que afeta o funcionamento do seu atuador linear. Certifique-se de usar o atuador dentro das especificações indicadas na ficha técnica do produto. Se tiver alguma dúvida específica relacionada a um atuador e à temperatura, entre em contato conosco. Contate-nos.
Posso integrar um dos seus atuadores a um mecanismo de terceiros?
Para fazer isso, certifique-se de que as especificações do seu sistema sejam compatíveis com os valores nominais de tensão e corrente do atuador. Se essas especificações forem compatíveis entre si, isso pode ser possível. entre em contato conosco se você não tiver certeza de qual atuador escolher.
Qual é a pinagem do meu atuador linear?
Para encontrar estas informações, consulte a ficha técnica do seu produto. Se o seu atuador linear foi personalizado, forneça imagens do produto, incluindo o número do seu pedido de venda (se possível), e envie essas informações por e-mail para sales@progressiveautomations.com
Posso obter modelos CAD 3D para o meu atuador linear?
Por favor clique aqui para obter uma lista de modelos CAD 3D disponíveis.
Quais são as opções de caixa de controle para o meu atuador?
A caixa de controle que você escolher deve ser capaz de fornecer valores nominais de tensão e corrente suficientes para o seu atuador. Se não tiver certeza das especificações, fale conosco.
Como alternativa, você também pode encontrar caixas de controle compatíveis na página do produto do seu atuador linear selecionado.
Posso usar suas caixas de controle com um produto de terceiros?
Para isso, verifique se as especificações do seu sistema são compatíveis com os valores nominais de tensão e corrente da caixa de controle. Se essas especificações estiverem alinhadas, isso pode ser possível. Se não tiver certeza sobre a compatibilidade, fale conosco.
Vocês vendem caixas de controle Wi-Fi?
Sim, o nosso PA-35 pode controlar até quatro atuadores lineares usando um dispositivo Android/iOS. Para mais informações, leia nosso artigo detalhado sobre como usar nossa caixa de controle Wi-Fi e o aplicativo.
Todas as suas caixas de controle são compatíveis com todos os seus atuadores lineares?
Posso usar minha própria caixa de controle?
Sim, porém você precisa garantir que sua caixa de controle possa fornecer corrente suficiente e uma tensão compatível. Caso contrário, há risco de danificar seu(s) atuador(es).
Vocês têm exemplos de código que eu possa usar?
Como somos principalmente fabricantes e distribuidores, temos uma quantidade limitada de códigos de exemplo disponíveis. Embora não possamos fornecer código específico para o seu projeto, temos uma lista crescente de códigos de exemplo para Arduino. Para acessar esses códigos de exemplo, por favor, clique aqui.
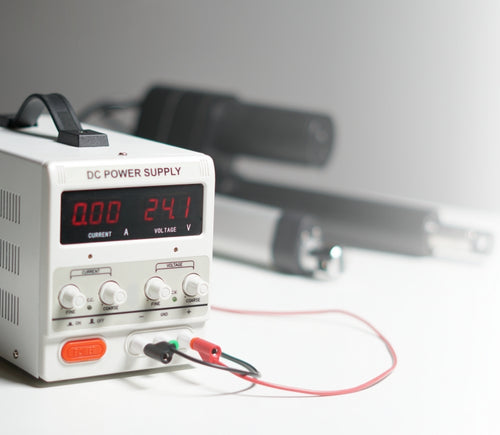
Não tenho uma fonte de alimentação – o que posso fazer?
Temos uma variedade de Fontes de alimentação CA para CC Você pode escolher entre as opções disponíveis em nosso catálogo. Como a maioria dos nossos atuadores é alimentada por 12 VDC, uma bateria automotiva de 12 VDC também é uma boa solução. Certifique-se de que os dispositivos conectados fornecerão corrente suficiente para sua configuração.
Posso usar minha própria fonte de alimentação?
Você pode usar sua própria fonte de alimentação se ela fornecer corrente suficiente e a tensão correta para o seu sistema. Caso contrário, você corre o risco de danificar seu(s) atuador(es) e/ou sua(s) caixa(s) de controle.
Vocês têm fontes de alimentação de 220 VCA disponíveis?
Sim, a maioria das nossas fontes de alimentação pode ser convertida para até 230 VCA. Para explorar nossa linha de fontes de alimentação, clique aqui.
Posso controlar as colunas de elevação com um controlador de terceiros?
Embora seja possível, recomendamos usar a caixa de controle que acompanha os conjuntos de colunas de elevação. Essas caixas de controle são programadas especificamente para que as colunas de elevação funcionem em movimento síncrono e o uso de um controlador de terceiros pode comprometer isso.
Posso usar duas colunas de elevação LG-11 juntas?
No entanto, nossa nova LG-11 oferece muitas características semelhantes à FLT-11 e tem a opção de ser pareada com a série FLTCON de caixas de controle e o controle remoto RT-11 para que várias unidades se movam em movimento síncrono. Temos sistemas de colunas de elevação duplas disponíveis, como FLT-06 ou FLT-10 que podem oferecer uma altura mínima de 22 polegadas a partir do chão.
Qual caixa de controle devo usar com minhas colunas de elevação?
Todas as nossas colunas de elevação incluem caixas de controle e controles remotos para controlar as unidades. Se você quiser saber mais sobre as caixas de controle que usamos, por favor entre em contato conosco.
Os elevadores para mesa/escrivaninha/TV são personalizáveis?
A única característica personalizável dos nossos elevadores de mesa/TV é a tensão de entrada. Observe que haverá um prazo de produção de 20 a 25 dias úteis para todos os pedidos personalizados.
Quais tamanhos de TV os seus elevadores de TV suportam?
Nosso elevador de TV pop-up motorizado suporta televisores de até 60 polegadas e nossos elevadores de TV de teto podem comportar televisores de até 95 polegadas. Clique aqui para explorar nossos elevadores de TV. Para ainda mais informações, confira nosso guia sobre o uso de elevadores de TV.
Qual é a capacidade de carga dos seus elevadores de mesa/escrivaninha?
As capacidades de carga dos nossos elevadores de mesa dependem do modelo escolhido. A capacidade mínima na nossa linha de elevadores de mesa é de 180 libras (equivalente a aproximadamente 80 kg) para o nosso Elevador de Mesa Individual FLT-01. A capacidade máxima na nossa linha de elevadores de mesa é de 330 libras (equivalente a aproximadamente 150 kg) para os Conjuntos de Elevador de Mesa FLT-09 e FLT-05.
Meu atuador linear vem com suportes de montagem?
Não, todos os nossos suportes de montagem são vendidos separadamente dos nossos atuadores lineares. No entanto, produzimos suportes de montagem compatíveis para cada um dos nossos atuadores lineares. Para saber qual suporte de montagem é adequado para o seu atuador linear, consulte a página do produto do atuador selecionado (onde isso será indicado) ou explore nosso catálogo de suportes de montagem.
Onde posso encontrar um guia passo a passo para o meu produto?
Eu segui o diagrama de fiação, mas não está funcionando – o que devo fazer?
Envie-nos um e-mail com fotos da sua configuração de fiação para que possamos analisar isso mais a fundo para você. Um de nossos engenheiros de vendas entrará em contato com você o mais rápido possível.
E-mail: sales@progressiveautomations.com
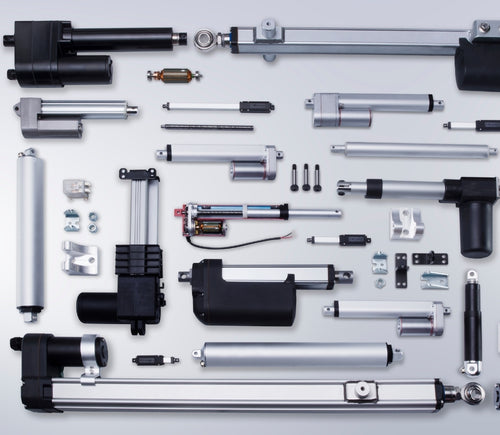
Fluxograma para seleção de atuadores
Escolher o atuador elétrico ideal para sua aplicação é essencial para dar vida a ela. Você precisa garantir que ele atenda a todas as suas especificações e tenha capacidade de fazer exatamente o que você deseja. Por isso, criamos este prático fluxograma para selecionar um atuador linear. Ele está dividido em quatro seções, e cada uma apresenta diferentes opções dos nossos atuadores para que você veja claramente como elas se diferenciam entre si:

As caixas de controle FLTCON são compatíveis com meus atuadores?
As
caixas de controle FLTCON não funcionarão com qualquer atuador. Este sistema requer
atuadores da Progressive Automations com feedback de sensor de efeito Hall, além de uma tensão de entrada de 24 V CC. Recomendamos usar o
PA-04-HS, que pode ser adquirido como produto de prateleira se você precisar de algo imediatamente! Além disso, também podemos personalizar os modelos de atuador
PA-03 ou
PA-18 para que tenham feedback de sensor de efeito Hall e funcionem com a série FLTCON. Entre em contato com nossos engenheiros de produto em
sales@progressiveautomations.com para mais informações e conte-nos sobre sua aplicação!
O que é backdriving? -- O que significam as capacidades de carga dinâmica e estática? -- O que é carga lateral?
O que é Backdriving?
Backdriving é quando um atuador começa a deslizar para baixo sob carga, seja por sobrecarga ou quando o atuador foi danificado. Assista ao vídeo.
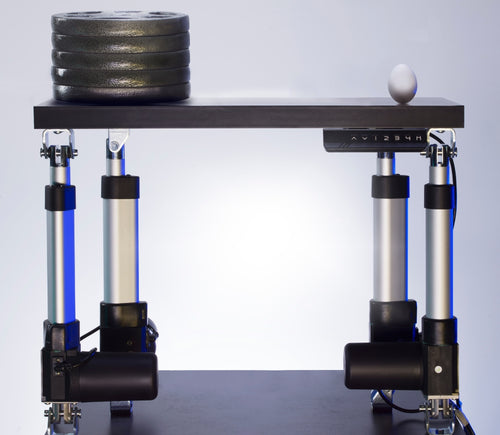
O que significam as capacidades de carga dinâmica e estática?
Capacidade de carga dinâmica é a quantidade de peso que um atuador pode puxar ou empurrar com segurança quando está alimentado. Capacidade de carga estática é a quantidade de peso que o atuador pode sustentar ou suportar sem backdriving quando não está alimentado. Por exemplo, suponha que você tenha um atuador instalado em uma janela e a capacidade de carga estática do atuador seja de 100 libras; ele pode sofrer backdriving em um evento de vento forte, o que significa que haverá mais pressão exercida sobre o atuador, excedendo a capacidade de carga de 100 libras do atuador.
O que é carga lateral?
Carga lateral é quando o atuador experimenta forças no plano lateral. Os atuadores não foram projetados para lidar com forças laterais; então, se sofrerem qualquer força lateral, isso provavelmente danificará o atuador ou entortará a haste. Portanto, recomenda-se nunca aplicar forças laterais e sempre garantir que o atuador esteja totalmente alinhado ou sincronizado com sua aplicação, para que não receba nenhuma carga além da carga axial. Assista ao vídeo.
Como posso fazer um pedido?
Vocês oferecem descontos por quantidade?
Sim, os descontos por quantidade são aplicados se você comprar 7 ou mais do mesmo produto. Os detalhes dos descontos por quantidade estão disponíveis na página de cada produto. Para mais informações sobre nossa estrutura de descontos, entre em contato.
Quais formas de pagamento vocês aceitam?
Aceitamos todos os principais cartões de crédito, PayPal, cheques e transferências bancárias. Para clientes que desejam configurar contas com prazo (Net Term), envie-nos um e-mail para iniciar o processo de solicitação.
E-mail: sales@progressiveautomations.com
Em qual moeda estão os preços?
Como sei se o produto que quero está em estoque?
Todos os produtos listados no site estão em estoque e disponíveis para envio no mesmo dia se o seu pedido for feito antes das 15h (PST). Se algum de nossos produtos não estiver disponível, entraremos em contato o mais rápido possível para informar quando a unidade estará disponível.
Quanto custará o frete e quais métodos de envio vocês oferecem?
As taxas de frete da Progressive Automations são calculadas com base em uma variedade de fatores, incluindo, entre outros: localização, quantidades e o peso total do seu pedido. Itens menores são enviados como encomenda, enquanto itens maiores e pedidos em volume são enviados por serviço de transportadora de cargas. Sempre nos esforçamos para oferecer preços de frete competitivos para todos os nossos clientes.
Os métodos de envio estão disponíveis em pedidos online e por telefone. Se você deseja receber uma estimativa do custo de frete do seu pedido, isso pode ser feito ao revisar seu carrinho de compras antes de finalizar.
Quais transportadoras vocês utilizam?
Enviamos por meio de várias transportadoras, incluindo FedEx, UPS, DHL e USPS. A transportadora selecionada pode variar de acordo com sua localização. Pedidos de grande porte são enviados por meio de diversas empresas de transporte de carga.
Entre em contato conosco se tiver alguma dúvida sobre essas opções ou se desejar enviar utilizando uma transportadora diferente ou sua própria conta de envio.
Terei que pagar algum imposto de importação?
Clientes do Canadá e dos EUA não pagarão nem incorrerão em impostos de importação em seus pedidos. Clientes fora da América do Norte podem estar sujeitos a impostos e taxas de importação. Entre em contato com a autoridade governamental local para obter informações sobre taxas e impostos de importação.
Qual é a sua política de devoluções?
Devoluções ou trocas são aceitas em até 30 dias após o recebimento do seu pedido, desde que o produto não tenha sido utilizado, modificado ou danificado. Para mais informações sobre nossa política de devoluções, consulte a seção Envio e Devoluções.
Qual é o prazo de entrega?
A entrega para os Estados Unidos continentais pode levar de 4 a 10 dias úteis. Todas as outras entregas podem levar aproximadamente de 10 a 15 dias úteis, dependendo da sua localização. Consulte nossa política de envio para mais informações: Envio & Devoluções
Vocês oferecem frete grátis?
Infelizmente, a Progressive Automations não oferece frete grátis. No entanto, você pode obter um desconto por quantidade a partir de 7 unidades iguais.