
- Úvod do fungovania aktuátorov
- Mechanizmy pozičnej spätnej väzby
- Typy riadiacich systémov pre aktuátory
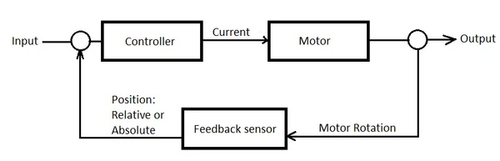
- Spätná väzba a oprava chýb
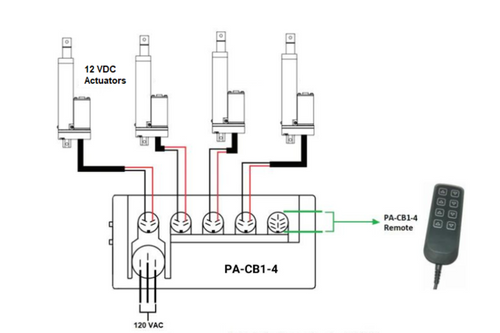
- Riadiace skrinky pre lineárne aktuátory
Úvod do fungovania aktuátorov
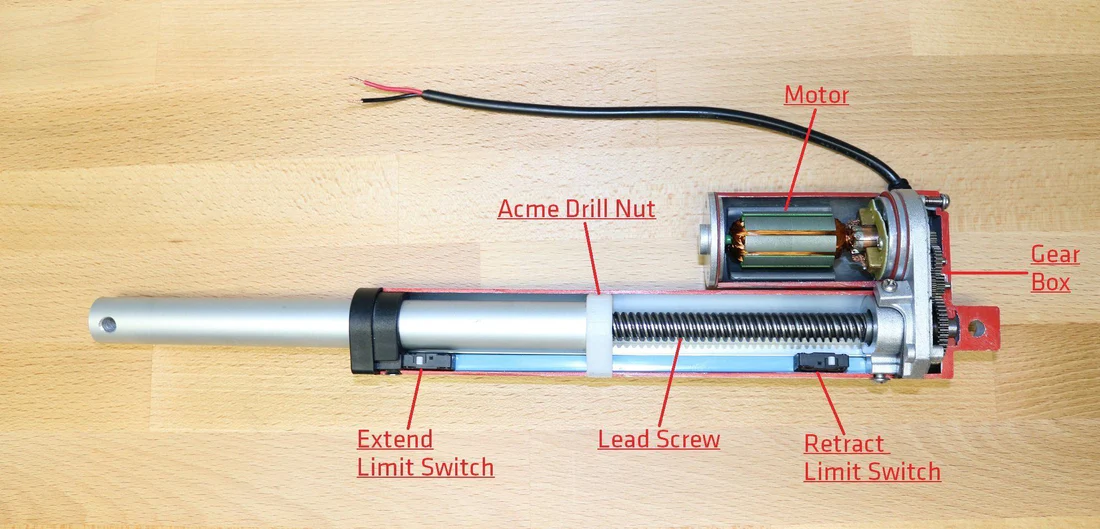
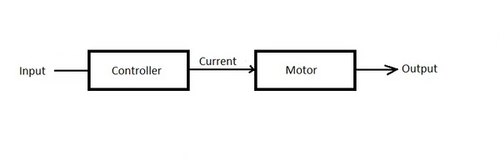
V elektrické lineárne aktuátory, elektrický prúd sa používa na vyvolanie rotačného pohybu v elektrický motor ktorý je mechanicky spojený s prevodovkou a využíva lead
screw na cyklus hriadeľa aktuátora pripojeného k ACME vŕtacia matica pre lineárny pohyb. Riadiace systémy pre aktuátory sa v priebehu rokov výrazne vyvinuli, čím sa zvýšila všestrannosť a funkčnosť týchto zariadení. Lineárne aktuátory je možné ovládať rôznymi prostriedkami a ovládacími mechanizmami vrátane:
• Bezdrôtové ovládače – ponúkajú používateľom pohodlie diaľkového ovládania na diaľku bez potreby fyzických káblov.
• Ovládače s podporou Wi-Fi a Bluetooth - umožňujú integráciu do inteligentných systémov a prístup prostredníctvom mobilných zariadení, poskytujú užívateľsky prívetivé rozhrania a možnosť upravovať nastavenia na diaľku a presne.
Tieto pokroky v technológii aktuátorov a riadiacich systémov rozšírili rozsah ich použitia, vďaka čomu sú nevyhnutné v moderných automatizovaných systémoch. Či už ide o nastavovanie okien v vozidlá, prevádzka v ťažkých podmienkach poľnohospodárske vybavenie, alebo automatizácia domácich spotrebičov, akčné členy naďalej zohrávajú kľúčovú úlohu pri preklade elektrických signálov do fyzickej činnosti.

Pochopenie riadiacich systémov pre aktuátory
Hlavným účelom týchto systémov je zabezpečiť, aby aktuátory fungovali presne, efektívne a spoľahlivo podľa vopred definovaných parametrov. Význam riadiacich systémov v prevádzke aktuátorov nemožno preceňovať, najmä pokiaľ ide o dosiahnutie presného a efektívneho riadenia pohybu. Tieto systémy sú kľúčové z niekoľkých dôvodov:
1. Presnosť: Riadiace systémy umožňujú jemné doladenie pohybov aktuátorov s cieľom dosiahnuť vysokú úroveň opakovateľnosti a presnosti. To je nevyhnutné v aplikáciách, kde je presné polohovanie kritické, napríklad v robotickej chirurgii alebo leteckom inžinierstve.
2. Účinnosť: Optimalizáciou spôsobu, akým aktuátory reagujú na príkazy, riadiace systémy znižujú spotrebu energie a minimalizujú opotrebovanie. To nielen predlžuje životnosť aktuátora, ale tiež zvyšuje celkovú účinnosť systému, v ktorom pracuje.
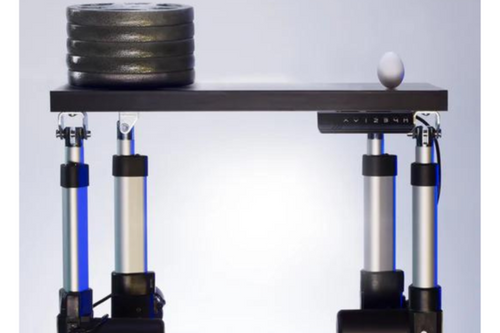
3. Adaptabilita: Mechanizmy spätnej väzby dokážu upravovať správanie kompatibilných aktuátorov v reálnom čase analýzou spätnej väzby o polohe z kompatibilných aktuátorov. Táto prispôsobivosť je nevyhnutná v dynamických prostrediach, kde sa podmienky rýchlo menia, napríklad v automatizovaných výrobných procesoch alebo keď viacero aktuátorov zaznamenáva nerovnomerné rozloženie hmotnosti.
5. Bezpečnostné prvky: Naprogramované bezpečnostné prvky, ako je ochrana proti preťaženiu, pomáhajú predchádzať poškodeniu pohonu alebo aplikácie tým, že zastavia prevádzku po tom, čo riadiaca skrinka zistí nadmerne vysoký odber elektrického prúdu. Ďalším bezpečnostným prvkom, ktorý sa nachádza v ovládacích skrinkách, je ochrana proti prehriatiu, ktorá zastaví prevádzku po určitom čase cyklu, aby sa zabezpečilo, že prevádzka zostane v rámci menovitého pracovného cyklu aktuátora, čím sa zabráni prehoreniu motora. Riadiace systémy sú základom funkčnosti aktuátorov a poskytujú potrebnú inteligenciu a prispôsobivosť na zabezpečenie presnosti, účinnosti, bezpečnosti a efektívneho riadenia pohybu. Ich úloha je kľúčová v rozširujúcej sa oblasti automatizačných technológií, kde presnosť pohybu je často základným kameňom prevádzkového úspechu.
Komponenty a typy riadiacich systémov
Kľúčové komponenty základnej ovládacej skrinky
V základnej ovládacej skrinke určenej pre elektrické lineárne aktuátory hrá každá súčasť kľúčovú úlohu pri zabezpečovaní efektívnej prevádzky. Tu je rozpis týchto hlavných komponentov, ich funkcií a účelov, ktorým slúžia:1. Relé: Relé fungujú ako spínače, ktoré ovládajú elektrický obvod s vysokým výkonom pomocou signálu s nízkym výkonom. Pre ovládacie skrinky určené na riadenie 2-vodičových aktuátorov sú dve relé nevyhnutné na zmenu polarity napätia privádzaného na dva vodiče aktuátora, čo následne mení smer pohybu. To umožňuje obojsmerné ovládanie v jednoduchom nastavení na vysúvanie a zasúvanie aktuátora.
2. Vstupné kanály: Vstupné kanály sú rozhrania, prostredníctvom ktorých riadiaci systém prijíma elektrické signály z externých zdrojov, ako sú napájacie zdroje alebo signály z káblových diaľkových ovládačov. Ovládacie skrinky, ktoré pracujú s polohovou spätnou väzbou, môžu tiež prijímať vstup zo senzorov aktuátora. Tieto kanály spracovávajú vstupy od používateľa a/alebo senzorov, aby určili, ako by mal aktuátor fungovať, čo ich robí základnými pre iniciovanie a riadenie pohybov aktuátora na základe špecifických požiadaviek.
3. Výstupné kanály: Výstupné kanály prenášajú riadiace signály z ovládača do aktuátora alebo iných komponentov, ako sú relé. Ovládacie skrinky, ktoré pracujú s polohovou spätnou väzbou, môžu tiež vydávať elektrický prúd, aby senzory aktuátora mali energiu na prevádzku. Tieto kanály sú kľúčové pre vykonávanie príkazov určených riadiacim systémom, čo priamo ovplyvňuje správanie aktuátora.
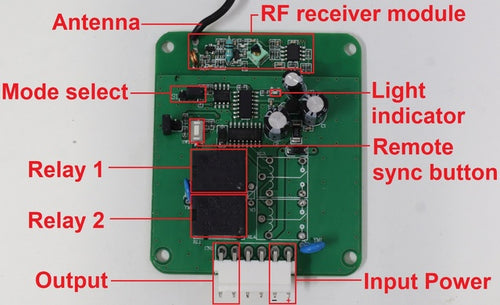
4. Tlačidlo diaľkovej synchronizácie: Toto tlačidlo sa používa na synchronizáciu riadiaceho systému s diaľkovým ovládaním. Zaisťuje, že riadiaci systém rozpozná a spracuje diaľkové vstupy, čo umožňuje pohodlné a flexibilné ovládanie na diaľku.
5. Svetelný indikátor: Svetelné indikátory poskytujú vizuálnu spätnú väzbu o stave systému. Môžu byť indikátorom zapnutia/vypnutia, prevádzkových režimov, chybových stavov alebo príjmu signálu, čo pomáha pri monitorovaní a odstraňovaní problémov so systémom bez potreby zložitých diagnostických nástrojov.
6. Výber režimu: Táto funkcia umožňuje používateľovi prepínať medzi rôznymi prevádzkovými režimami ovládacej skrinky, ako sú napríklad okamžité alebo nedôsledné ovládanie. V okamžitom režime musí byť tlačidlo diaľkového ovládania nepretržite držané v aktívnej polohe, aby zariadenie fungovalo. Po uvoľnení spínača zariadenie prestane fungovať. Nedôsledný režim funguje ako spínač, ktorý zostáva v poslednej nastavenej polohe, kým sa znova nezmení, bez ohľadu na to, či je stlačený. To znamená, že po aktivácii zariadenie pokračuje v prevádzke, kým sa spínač manuálne nevypne.
7. Anténa: Anténa je súčasťou ovládacích skriniek, ktoré majú bezdrôtové komunikačne nastavenie. Antény sa používajú na zlepšenie dosahu a kvality signálu medzi riadiacim systémom a zariadeniami diaľkového ovládania alebo medzi prepojenými systémami. Je nevyhnutná pre udržanie robustnej komunikácie v prostrediach, kde je priame zapojenie nepraktické alebo nežiaduce.
8. Modul RF prijímača: Tento modul prijíma rádiofrekvenčné signály vysielané bezdrôtovými diaľkovými ovládačmi. Dekóduje tieto signály do akčných príkazov, ktorým riadiaci systém rozumie a na ktoré môže reagovať. Modul RF prijímača je nevyhnutný pre bezdrôtové ovládanie, pretože umožňuje diaľkové ovládanie pohonu bez fyzického kontaktu. Tieto komponenty spolu tvoria komplexný riadiaci systém pre 2-vodičové pohony, pričom každý slúži špecifickej funkcii, ktorá prispieva k celkovej účinnosti a efektívnosti prevádzky pohonu. Tento systém nielenže umožňuje presné ovládanie pohybov aktuátora, ale tiež vylepšuje používateľské rozhranie a interakciu, vďaka čomu je prispôsobiteľný širokej škále aplikácií.
Mechanizmy pozičnej spätnej väzby
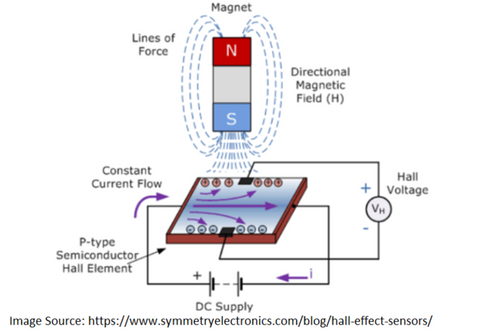
Hallove senzory
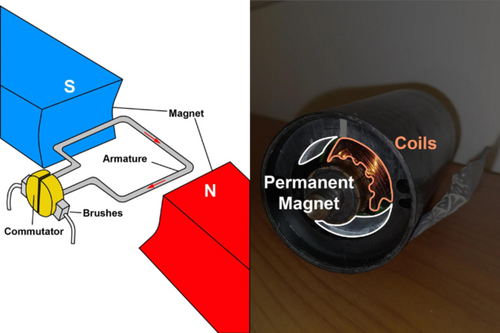
Teória Hallovho javu, ktorú objavil Edwin Hall (ktorý Hallov jav), uvádza, že vždy, keď je magnetické pole aplikované v smere kolmom na tok elektrického prúdu vo vodiči, indukuje sa rozdiel napätia. Toto napätie sa dá použiť na detekciu, či sa Hallov senzor nachádza v blízkosti magnetu.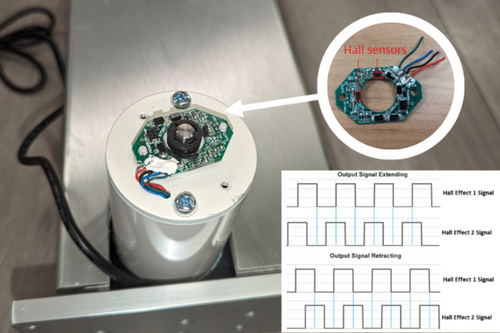
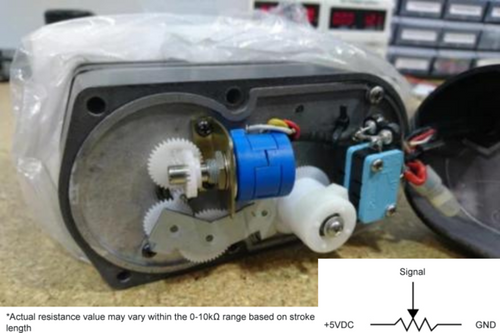
Potenciometre
Potenciometer poskytuje variabilný odpor, ktorý je úmerný polohe aktuátora. Medzi gombíkom potenciometra a rotujúcim motorom aktuátora sú často prepojené ozubené kolesá. Ako sa aktuátor pohybuje, hodnota odporu sa mení, čo je možné merať a previesť na údaje o polohe. Tieto informácie potom riadiaci systém použije na jemné doladenie polohy aktuátora, čím sa zvýši presnosť.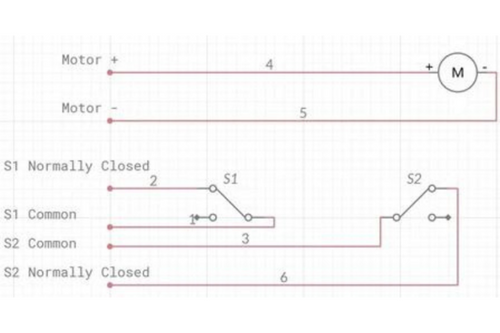
Spätná väzba koncového spínača
Účelom signálov spätnej väzby koncových spínačov je umožniť systému určiť, či ovládač fyzicky aktivoval interné koncové spínače. Tento druh spätnej väzby je jednoduchý a užitočný pre aplikácie, ktoré vyžadujú najmä informácie o tom, či ovládač dosiahol úplne vysunutú alebo úplne zasunutú polohu.Typy riadiacich systémov pre aktuátory
Jeden príklad jednoduchého systému s otvorenou slučkou zahŕňa momentový kolískový spínač pripojený k lineárnemu aktuátoru. To vyžaduje, aby obsluha fyzicky stlačila a podržala spínač, aby aktuátor pokračoval v cyklovaní, a uvoľnenie spínača predtým, ako aktuátor dosiahne koniec dráhy, spôsobí, že aktuátor sa v polovici pohybu zastaví.
Výber riadiaceho systému a jeho komponentov významne ovplyvňuje funkčnosť a optimalizáciu výkonu pohonných jednotiek. Integráciou účinných mechanizmov spätnej väzby a výberom vhodného typu riadiaceho systému je možné pohonné jednotky optimalizovať pre širokú škálu aplikácií, čím sa zabezpečí presnosť aj spoľahlivosť ich prevádzky.
Spätná väzba a oprava chýb
Premenné, ktoré riadiace systémy korigujú
1. Poloha: Riadiace systémy pomáhajú zabezpečiť, aby aktuátor presne dosiahol a udržal požadovanú polohu porovnaním polohy používateľa so skutočnou polohou nameranou zo snímačov polohovej spätnej väzby. Príklady zahŕňajú situácie, keď stojaci používatelia pri stole stlačia tlačidlo ovládača, aby sa aktuátory presunuli do konkrétnej prednastavenej polohy v pamäti, aby si upravili pracovný priestor zo sediacej do stojacej výšky.
2. Rýchlosť: Odčítanie polohovej spätnej väzby a vydelenie prejdenej vzdialenosti uplynutým časom bude mať za následok rýchlosť pohybu. Niektoré riadiace systémy umožňujú nastaviteľnú rýchlosť pomocou PWM (modulácia šírky impulzov), čo umožňuje pohonu pohybovať sa rôznymi rýchlosťami na základe požiadaviek aplikácie. To je užitočné v aplikáciách, kde sú potrebné rôzne rýchlosti, napríklad pre pohony poháňajúce pohyb leteckých simulátorov.
3. Sila: Niektoré riadiace systémy dokážu regulovať množstvo sily vyvíjanej pohonmi, čím zabezpečujú, že fungujú v bezpečných medziach a zabraňujú poškodeniu systému alebo okolitých komponentov. Meraním odberu elektrického prúdu dokážu riadiace systémy odhadnúť približne akú silu vyvíjajú lineárne pohony. Táto funkcia je užitočná pre lineárne pohony, ktoré otvárajú a zatvárajú okná, aby vypli napájanie a zastavili pôsobenie sily v prípade, že ruka alebo prekážka osoby blokuje dráhu pohybu.
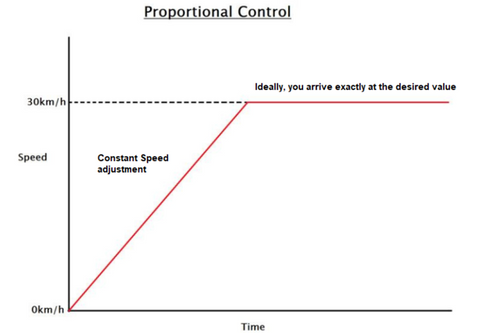
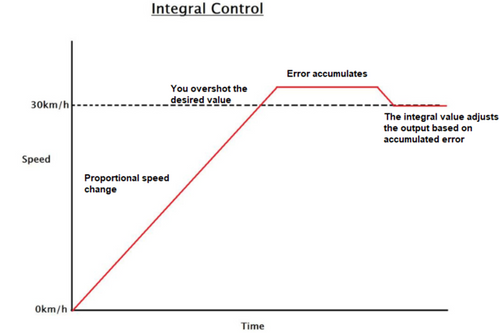
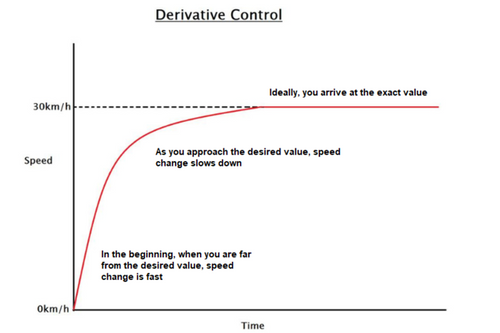
Typy stratégií riadenia
Výber správneho riadiaceho systému
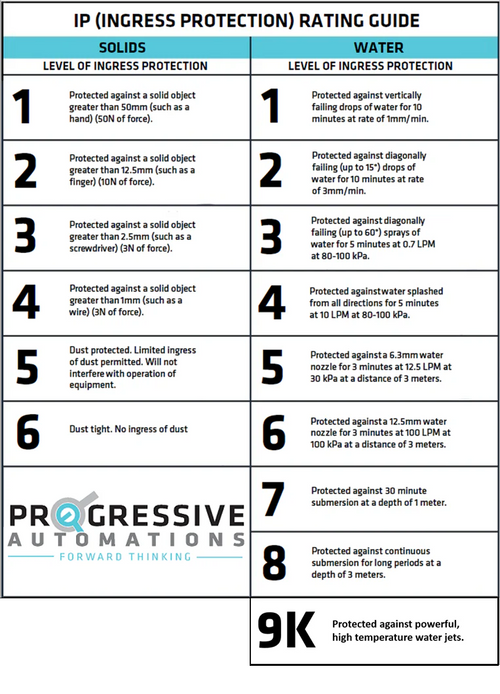
• Ingress Protection
• Compatibility
• Budget
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Ovládacie skrinky typu Hallov jav
Ďalšie informácie nájdete v našom blogu o aplikáciách pre ovládacie skrinky FLTCON.
