Tento návod pomôže pochopiť ovládanie ovládača bezkefového jednosmerného motora v kombinácii s Arduinom a lineárnym aktuátorom. Tento program možno použiť na nepretržité vysúvanie a zasúvanie zdvihu aktuátora.
Skôr než začneme, prejdime si komponenty, ktoré budeme v tomto návode používať:
- Arduino Mega (možno použiť aj Arduino Uno).
- LC-241.
- PA-14 s bezkefovým motorom.
- Napájací zdroj PS-13-12.
- Prepojovacie vodiče.
�a0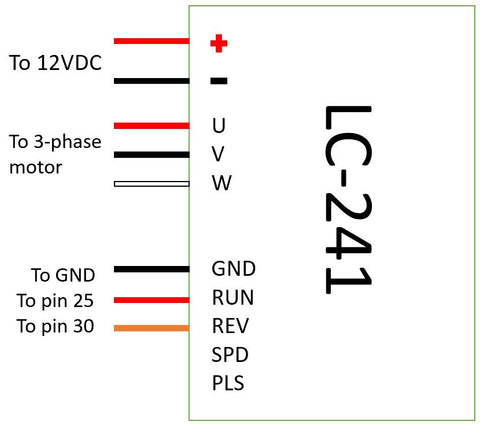
Lineárny aktuátor má dva zväzky vodičov: jeden pre motor a druhý pre koncové spínače. Schéma na obrázku vyššie ukazuje, ako komponenty zapojiť.
PIN SETUP CODE
int out_lim = 45; // pin pre vonkajší koncový spínač
int in_lim = 53;�a0 // pin pre vnútorný koncový spínač
int run_f = 25;�a0 // pin RUN na ovládači
int run_r = 30;�a0 // pin REV na ovládači
Táto časť kódu zabezpečuje inicializáciu pinov, ktoré sa použijú na príjem a odosielanie údajov. V tomto prípade sa použili všetky digitálne piny, no možno použiť aj analógové.
SETUP LOOP CODE
void setup() {
�a0�a0Serial.begin(9600);�a0 // inicializuje sériovú komunikáciu rýchlosťou 9600 bitov za sekundu
�a0 pinMode(out_lim, INPUT_PULLUP); // nastaví pin 45 ako vstupný pin
�a0 pinMode(in_lim, INPUT_PULLUP); // nastaví pin 53 ako vstupný pin
�a0 pinMode(run_f, OUTPUT); // nastaví pin 25 ako výstupný pin
�a0 pinMode(run_r, OUTPUT); // nastaví pin 30 ako výstupný pin
�a0
�a0 retract(); // pri štarte zasunie zdvih
�a0�a0delay(500);
�a0 }
Slučka „setup“ určuje, ktoré piny budú použité ako výstupné a ktoré ako vstupné. Ako je vidieť v kóde, piny pripojené ku koncovým spínačom sa použijú na čítanie stavov koncových spínačov a piny pripojené k „RUN“ a „REV“ na LC-241 sa použijú na zápis. Na začiatku kód tiež spustí funkciu zasunutia, aby sa pred štartom úplne zasunul.
FUNCTION DEFINITIONS CODE
void extend() // táto funkcia umožní spustenie motora
{
�a0digitalWrite(run_f, LOW);
�a0digitalWrite(run_r, HIGH);
�a0}
void retract() // táto funkcia zmení smer motora
{
�a0 digitalWrite(run_f, LOW);
�a0 digitalWrite(run_r, LOW);
}
void run_stop() // táto funkcia vypne motor
{
�a0 digitalWrite(run_f, HIGH);
�a0 digitalWrite(run_r, HIGH);
}
Táto časť vysvetľuje funkcie použité na riadenie výkonu a smeru motora. Motor budeme zapínať a vypínať zápisom „0“ alebo „1“ na pin „RUN“ a následne rovnakými príkazmi na pin „REV“ na zmenu smeru motora.
MAIN LOOP CODE
Void loop() {
�a0�a0 int out_lim_state = digitalRead(out_lim);�a0 �a0�a0// prečíta koncové spínače a uloží ich hodnotu
�a0 int in_lim_state = digitalRead(in_lim);
�a0�a0 Serial.print("hodnota vonkajšieho koncového spínača "), Serial.println(out_lim_state); // 0 -> koncový spínač je stlačený
�a0�a0 Serial.print("hodnota vnútorného koncového spínača "), Serial.println(in_lim_state);�a0 // 1 -> koncový spínač nie je stlačený
�a0 if (out_lim_state == 0 && in_lim_state == 1) // ak je stlačený vonkajší koncový spínač a vnútorný nie (úplne vysunutý)
�a0�a0 {
�a0 �a0retract(); // zasunúť zdvih
�a0�a0 }
�a0�a0 else if (out_lim_state == 1 && in_lim_state == 0) // ak je stlačený vnútorný koncový spínač�a0 �a0a vonkajší nie (úplne zasunutý)
�a0 {
�a0 �a0extend(); // vysunúť zdvih
�a0 }
�a0
Slučka „loop“ v zásade len číta vstupy z koncových spínačov, kontroluje, či sú stlačené, a na základe toho mení smer motora.
Väčšina lineárnych aktuátorov na trhu je vybavená kefovým jednosmerným motorom, takže dostupný pracovný cyklus pri takomto motore do istej miery znemožňuje jednotku nepretržite prevádzkovať. V Progressive Automations dávame zákazníkom možnosť zvoliť si pre náš model PA-14 bezkefový jednosmerný motor, čím získajú ešte viac možností pre svoje projekty.