Det finns två metoder för styrning av flera ställdon – parallell och synkron. Parallell styrning matar ut en konstant spänning till varje ställdon, medan synkron styrning matar ut variabel spänning till varje ställdon.
Processen att synkronisera flera ställdon är nödvändigt när man implementerar två eller flera ställdon för att röra sig med samma hastighet. Detta kan uppnås med två former av positionsåterkoppling – halleffektsensorer och flervridpotentiometrar.
En liten variation i ställdonstillverkningen resulterar i en liten variation i ställdonets hastighet. Detta kan korrigeras genom att mata ut en variabel spänning till ställdonet för att matcha två ställdonhastigheter. Positionsåterkopplingen är nödvändig för att bestämma hur mycket spänning som krävs för att mata ut till varje ställdon.
Synkronisering av ställdon är viktigt vid styrning av två eller flera ställdon där exakt styrning behövs. Till exempel applikationer som kräver flera ställdon för att flytta en last samtidigt som jämn lastfördelning över varje ställdon bibehålls. Om parallell styrning användes i denna typ av applikation kan ojämn lastfördelning uppstå på grund av varierande slaghastigheter och i slutändan orsaka överdriven kraft på ett av ställdonen.
Halleffektsensor
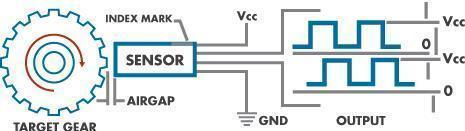
För att sammanfatta Halleffektteorin konstaterade Edwin Hall (som upptäckte Halleffekten) att närhelst ett magnetfält appliceras i en riktning vinkelrät mot strömflödet i en ledare, induceras en spänningsskillnad. Denna spänning kan användas för att detektera om sensorn är i närheten av en magnet eller inte. Genom att fästa en magnet på motorns axel kan sensorerna detektera när axeln är parallell med dem.
Med hjälp av ett litet kretskort kan denna information matas ut som en fyrkantsvåg, vilken kan räknas som en sträng av pulser. Genom att räkna dessa pulser kan man hålla reda på hur många gånger motorn har snurrat och hur den rör sig.

Vissa halleffektkretskort har flera sensorer. Det är vanligt att de har två sensorer vid 90 graders vinkel, vilket resulterar i en kvadraturutgång. Genom att räkna dessa pulser och se vilken som kommer först kan du avgöra i vilken riktning motorn snurrar. Eller så kan du bara övervaka båda sensorerna och få fler räkningar för mer exakt kontroll.
Synkronisering via Halleffektsensoråterkoppling kan uppnås med progressiva automationer PA-40 Synkroniserad dubbel Hall-effektställdonstyrning låda.
Potentiometersynkronisering
Flervarvspotentiometrar, även kända som reostater eller variabla motstånd, ger en analog representation av ett ställdonposition. Sensorn är fäst vid ett växelsystem som är anslutet till motorn och som vrider potentiometern och justerar därför resistansvärdet proportionellt mot den rörelselängd som ställdonet har gjort. Den totala resistans-/spänningsförändringen kan mätas för att erhålla ett fullskaligt område av det analoga värdet som representerar ställdonets totala slaglängd. Potentiometrarna som används i Progressive Automations ställdon är 10 kΩ.
För synkroniseringsändamål avläses det analoga värdet för varje potentiometer, vilket en program-/styrenhet sedan kan använda för att bestämma den nödvändiga spänningsutgången till varje ställdon. Potentiometersynkronisering kan uppnås via mikrokontroller programmering.
Vikten av synkronisering
Här förklaras synkroniseringsmetoderna. Nu vill vi titta på varför synkronisering är viktig. När målet att använda flera ställdon för att trycka eller dra en last är att se till att ställdonen matchar hastigheterna exakt. Denna precision i ställdonshastighet behövs för att säkerställa jämn lastfördelning.Let’s look at an application that requires a pushing force of 700 lb and two actuators. For this example, we will use two PA-04 IP-66 Linjär ställdon with a force rating of 400 lb each customized with HALL Effect sensors for positional feedback. The combined dynamic force rating of the two actuators, when used in sync, is 800 lb. The force needed for the system is 700 lb so the combined actuator force rating of 800 lb would be acceptable for this application.
Since this application uses two actuators to hold the desired load, the weight must be distributed evenly across the two actuators. In order to ensure even load distribution, the actuators must maintain equal height – if the equal height is not achieved one of the two actuators will bear additional weight and will experience torque (or sideloading). The additional weight and torque may overexert the actuators which result in actuator failure.
Slutliga kontrollelement
Vikten av att synkronisera ställdon handlar om att säkerställa en jämn rörelse hos flera ställdon och förhindra att ställdonet har fel.
Halleffektkontrollbox
När ställdon anpassas med HALL-effektsensorer, PA-40 kontrollbox kan användas för synkronisering av halleffekter.
Arduino mikrokontroller
Implementering av ställdonsstyrning kan uppnås via Arduino-programmering. Besök följande länkar för mer information:
Om du har ytterligare frågor, tveka inte att kontakta teknikavdelningen stöd och få svaret omedelbart.