
Може да има случаи, когато искате да преместите обект на по-голямо разстояние от дължината на хода на задвижващия механизъм. Можете да постигнете това, като използвате телескопичен... задвижващ механизъм или можете да използвате физиката на механичното задействане във ваша полза. Често срещани примери за това са ножичният подемник или това, което нашият приятел Майк Сена, създателят на Роботът Уол-И, направи със своите Автоматично отваряне на врата за кокошарник „Направи си сам“.
Механично използване на ливъридж
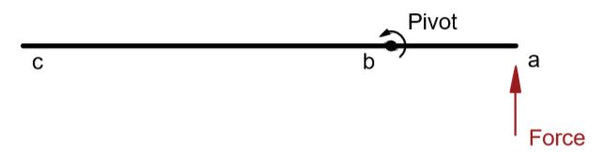
Физиката зад тези приложения е използването на съотношение на разстоянията от точката на въртене от всяка страна. Както можете да видите на фигура 1, задвижващият механизъм е монтиран в точка „a“ с фиксирана точка на въртене в точка „b“. Като вземете съотношението на „B“ и „A“, се получава съотношение „R“. Това означава, че точка „c“ ще се завърти „R“ пъти повече от хода на задвижващия механизъм. Това обаче ще увеличи силата, необходима на задвижващия механизъм, и скоростта на въртене на точка „c“ с „R“ пъти. Това е принципът, на който се основава използването на линеен задвижващ механизъм въз основа на дължината на неговия ход и мястото на монтажа му.
Автоматично отваряне на врата за кокошарник „Направи си сам“
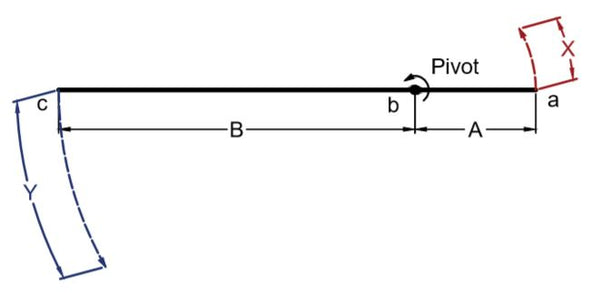
Кандидатстването на Майк Сена използва същия принцип, обсъден по-горе, и предоставя чудесен пример за добавяне на друг елемент, който преобразува въртенето на точка „c“ в линейно движение. На фигура 2 можете да видите, че горният елемент се върти около точката на въртене, а задвижващият механизъм натиска в точка „a“.
Фигура 2: Горен елемент, въртящ се около опорна точка в точка b
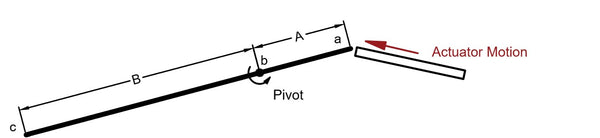
Майк знаеше, че вратата на кокошарника трябва да се отваря приблизително 45 см. За да направи съотношението „R“ равно на три и да гарантира, че точка „c“ ще се измести на 45 см с ход от 15 см, той постави точката на въртене ¾ спрямо точка „a“ (фигура 3). Майк направи това, като позиционира рамото така, че да има 9,3 см от едната страна на точката на въртене и 26,4 см (9,3 см x 7,6 см) от другата страна.
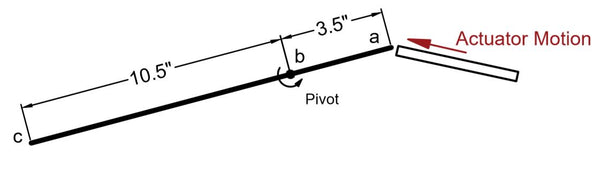
Фигура 3: Горен елемент, въртящ се около опорна точка в точка b с размер
After this, Mike added another member to transform the rotational motion to linear motion. He explains, “My solution was to add another arm whose purpose is to adjust for the arc as one end moves in an arc and the other end adjusts to a linear movement.” Figure 4 is a diagram made for his DIY Chicken Coop Automatic Door Opener проект, показан на различни позиции по време на движението му. Обърнете внимание, че скоростта на вратата на кокошарника и силата, прилагана от задвижващия механизъм, ще се променят по време на движението. Сега въпросът беше да се регулира позиционирането, за да се постигне желаният от него ход на вратата.
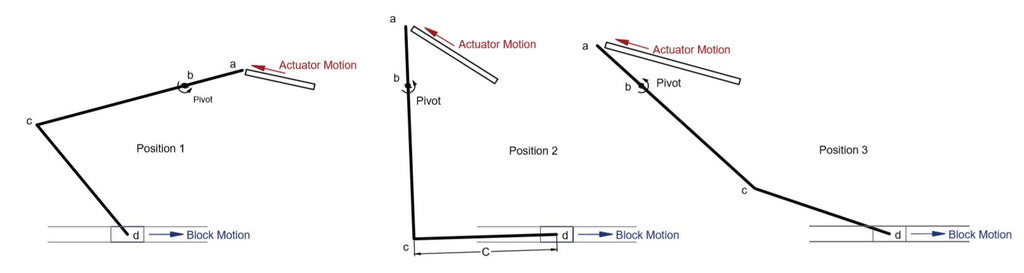
Фигура 4: Врата на кокошарника на три различни позиции
Ножичният асансьор
Ножичният подемник е друго приложение, което използва този принцип за постигане на по-линейно движение с механично лостово управление. За да се предостави пример за това как да се използва линеен задвижващ механизъм, е създаден 3D модел с задвижващ механизъм за ножичен подемник, за да се симулира по-голямото движение на платформата с относително по-кратко движение на задвижващия механизъм.
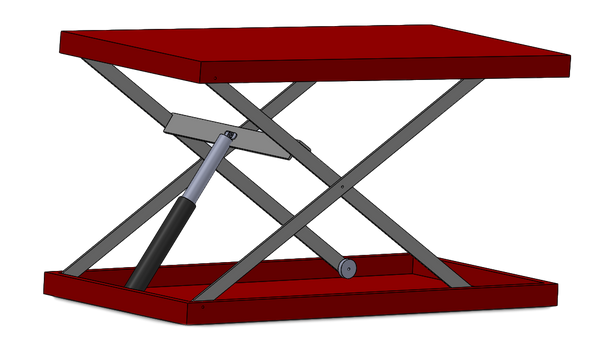
Фигура 5: 3D модел на едноетапен ножичен подемник
Както можете да видите на Фигура 5, за повдигане до височина от 36 инча е използван задвижващ механизъм за ножичен подемник с относително къс ход (в този случай 8 инча). Ножичните подемници работят на същия принцип, при който тялото се върти около точка на въртене и се създава механично предимство. Вместо обаче да се добави още един елемент, чиято цел е просто да предава въртеливото движение на единия край, движението на краищата на елементите е ограничено до хоризонтална посока. Това води до това, че посоката на силата е само нагоре.
Интересното при ножичния подемник е, че ако задвижващият механизъм е монтиран на горната половина, подемникът ще се повдигне, когато задвижващият механизъм се разгъва. Ако обаче задвижващият механизъм е монтиран на долната половина, подемникът ще се повдигне, когато задвижващият механизъм се прибере. Също така имайте предвид, че колкото по-близо е монтиран задвижващият механизъм до средната става на елементите, толкова повече ще се повдигне подемникът, но задвижващият механизъм ще изисква по-голяма сила.
Ако проучвате как да използвате линеен задвижващ механизъм За да преместите обект на по-голямо разстояние, телескопичен задвижващ механизъм или „Направи си сам“ механизъм за повдигане с ножица ще свършат работа. За задвижващ механизъм за ножичен повдигач или механизъм за врата, Progressive Automations предлага разнообразие от модели с различни ходове и сили, които да отговарят на всички ваши „Направи си сам“ нужди.