Bewegungssimulatoren sind entscheidende Hilfsmittel für die Ingenieuranalyse, Schulung, Bildung und Unterhaltung, da sie ein realistisches Gefühl für bewegte Objekte erzeugen. Linearantriebe sind eine beliebte Lösung zur Antrieb mechanischer Vorgänge aufgrund der erheblichen Vorteile, die sie bieten können; jedoch können Bewegungssimulatoren sie auf viele verschiedene Arten für eine Vielzahl von Anwendungen integrieren. In diesem Artikel werden wir einige Beispiele für Bewegungssimulatoren behandeln, um besser zu verstehen, wie Bewegungssimulatoren und Linearantriebe zusammenarbeiten.
Anwendungsfälle
Es gibt viele Möglichkeiten, elektrische Linearantriebe in Bewegungssimulatoren zu implementieren. Nur um einige Beispiele zu nennen, wurden Antriebe verwendet, um die lineare Bewegung zu erzeugen, die in:
- Flugsimulatoren
- Simulatoren für Militärfahrzeuge
- Themenparkfahrten
- Fahr-/Rennsimulatoren
- Raumschiff-Simulatoren
- Stewart-Plattformen
- Verschiedene Arcade-Videospiele
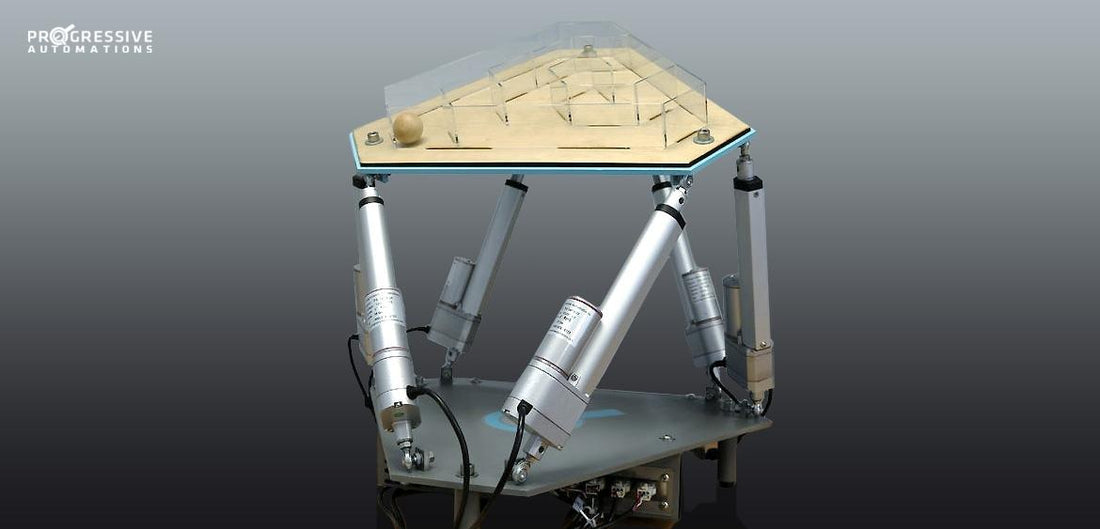
Sechs-Achsen-Plattform mit Linearantrieben (Stewart-Plattform)

Stolz gesponsert von Progressive Automations, ermöglicht die Stewart-Plattform des Ingenieurphysik-Departments der UBC eine interessante und interaktive Erfahrung, um über die Steuerung der linearen Bewegung sowie die Physik, die in der Robotik involviert ist, zu lernen.
Durch die Integration unserer PA-14P Rückmeldungs-Linearantriebe kann die Positionsinformation über Rückmeldesignale von den integrierten Potentiometern des Antriebs gelesen werden. Das Vorhandensein von Positionsinformationen ermöglicht es einem System zu bestimmen, ob die Antriebe die erforderlichen Positionen genau erreicht haben, um Fehler zu minimieren und eine höhere Wiederholgenauigkeit zu ermöglichen. Obwohl Geräte wie Hall-Effekt-Sensoren und Beschleunigungssensoren eine höhere Genauigkeit bieten könnten, ist ihr Integrationsprozess komplexer, während die Rückmeldemöglichkeiten des Potentiometers ausreichende Genauigkeit bei einfacher Integration bieten. Darüber hinaus boten die Modelle PA-14P-6-35 auch eine Geschwindigkeit (2,00"/sek ohne Last) und eine kompakte Größe, die für diese Anwendung mit einer Hublänge von 6 Zoll geeignet war.

Der LC-062 Arduino Due Mikrocontroller verbindet die sechs Antriebe zusammen mit zwei MultiMoto Arduino Shields und mit dem Host-PC über eine USB-Seriellverbindung. Da unsere Multimoto-Boards maximal vier unabhängig gesteuerte Kanäle gleichzeitig verarbeiten konnten, wurden die sechs für das Projekt benötigten Linearantriebe auf drei pro Board aufgeteilt. Die Bewegungen der Antriebe wurden dann über ein PID-Rückmeldesystem gesteuert, das die Potentiometerwerte des PA-14P als Eingaben verwendete.

Zusammen mit der benutzerdefinierten grafischen Benutzeroberfläche (GUI) ermöglicht ein Leap Motion Controller, der drei IR-Emitter und zwei Kameras verwendet, den Benutzern die vollständige Bewegungssteuerung der Plattform mit einer Handbewegung. Für einen detaillierten Überblick über die Stewart-Plattform haben wir den Projektbericht und die GitHub-Links beigefügt.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
Die Technologie hinter Stewart-Plattformen wird in vielen anderen modernen Bewegungssimulatoren verwendet, da sie über 6 Freiheitsgrade (drei für die Position, drei für die Richtung) verfügt, was die größte Anzahl von Freiheitsgraden ist, die ein einzelner starrer Körper haben kann. Ein größeres Beispiel dafür ist der Cruden HexaPod Bewegungssimulator, der seine sechs Freiheitsgrade nutzt, um die genauesten und wiederholbarsten Simulationen zu ermöglichen.

Flugsimulator mit Linearantrieben

Da die Technologie weiterhin fortschreitet, werden Bewegungssimulatoren allmählich erschwinglicher für DIY-Hersteller auf der ganzen Welt. Ein bemerkenswertes Beispiel dafür ist das Flugsimulator-Projekt unseres Kunden Anthony Escalante. Mit seinem modularen Design aus maßgefertigten Komponenten, elektronischer Hardware und Programmierung schuf Anthony einen voll funktionsfähigen Flugbewegungssimulator für sein Zuhause.
Entwickelt mit mehreren PA-03 und PA-04 Standard-Linearantrieben, verfügt Anthonys Design über 6 Freiheitsgrade, ähnlich der zuvor erwähnten Stewart-Plattform. Jeder unserer Standard-Linearantriebe hatte die ausreichenden Geschwindigkeits- und Kraftwerte, um die Neigungen, Drehungen und Wendungen für die Simulation eines echten Flugs durch Anthonys Bewegungsplattform sanft zu bewältigen.

Begleitet von vier Stromversorgungen hat das Steuerungssystem einen ausreichenden Stromverbrauch, um die Motorsteuerungen und Mikrocontroller zu integrieren, die ordentlich im Steuerungshub des Simulators untergebracht sind.
„Es läuft wirklich reibungslos und ist einfach zu warten," sagte Anthony. "Ich habe sichergestellt, dass es modular für die Wartung ist. Teile waren leicht in Baumärkten erhältlich und Metallteile wurden bei Metal Mart gekauft und zugeschnitten. Antriebe und Aufhängung sind leicht zu ersetzen. Kein Kopfzerbrechen wegen Ausfallzeiten. Meine Großmutter kann es sogar selbst machen“.

Track-Linearantriebe wie der PA-18 und PA-08 sind hervorragende Alternativen für innere Bewegungssimulatoren, die Lösungen mit einer kompakten Länge beim Ausfahren und Einfahren benötigen. Dies liegt daran, dass Track-Linearantriebe einen Bewegungsbereich haben, der in einem vordefinierten Pfad der Schiene eingeschlossen ist, anstatt dass eine Welle in die freie Luft ragt.
Biplan-Simulator für Kinder

Bewegungssimulatoren werden auch zu Unterhaltungszwecken verwendet, wie der Biplan-Simulator für Kinder von EAA 485. Dieses Projekt war eine Modernisierung des ursprünglichen 3-Achsen-Simulators, der von einem Schwesterkapitel in Wetumpka, AL, bekannt ist. John McKiernan, der Präsident von EAA 485, freut sich, sein Projekt mit uns zu teilen!
Der Biplan-Simulator benötigte eine Hublänge von 4 Zoll in den Roll- und Nickachsen, und da die Gierachse auf einer Drehscheibe war, konnte das Bewegen des angehängten Punktes die Gierbewegung erhöhen oder verringern. Mit vorheriger Erfahrung mit unseren Produkten konnte McKiernan den PA-03 24 V DC, 200 Pfund Antrieb mit einer Hublänge von 4 Zoll als geeignetes Modell bestimmen.
„Es dauerte weniger als einen Tag, um es einzustellen und die Gierachse zum Laufen zu bringen. Dann kaufte ich 3 weitere identische Antriebe, um einen Ersatz zu haben. Um das Rollen und Nicken zu ermöglichen, war es notwendig, 4 Aluminiumblöcke zu fräsen, um die Installation eines Heimlagers zu ermöglichen. Die Gelenke des Heimlagers waren notwendig, um eine axiale Bewegung in der Roll- und Nickbetätigung zu ermöglichen. Diese wurden von Hand gefertigt und schienen gut zu funktionieren. Später wurde ein neues Sicherungspaneel mit normalen Flachsicherungen hergestellt, eine für jeden Antrieb, Hobbs-Meter und Cockpit. Das Cockpit hat echte Flugzeuganzeigen und einen sehr cleveren Radialmotor-Sound, der über einen Gashebel gesteuert wird. Es verwendet Funksteuerungsservo-Tester, die an ein Modul und einen kleinen Lautsprecher hinter dem Armaturenbrett angeschlossen sind. Es hatte sogar einen realistischen Maschinengewehr-Sound, wenn ein Knopf gedrückt wurde“, erklärt McKiernan.
McKiernan erklärt weiter: „Die ursprünglichen Schalter verwendeten eine Federrolle, die, wenn der Stick oder die Pedale in Neutralstellung waren, in einem phenolischen Block war, und das Bewegen des Sticks oder der Ruderpedale bewegte es auf eine Aluminium-Schalterplatte. Es war mir egal, dass der Stick den elektrischen Pfad bereitstellte, obwohl phenolische Blöcke den Bereich unter dem Sitz isolierten. Diese wurden an einer umgekehrten Aluminiumplatte befestigt und jeweils über die bestehende untere Struktur des ursprünglichen Schalters angepasst.”
Die Kugel ruht in der Mittelposition des Schalters in Neutralstellung, und mit einer Bewegung des Sticks oder der Pedale bewegt sich die Rolle und drückt den Schalter. Das Rollensystem, das ursprünglich rund war, erforderte etwas mehr Feinabstimmung, da der tatsächliche Block geschnitten werden musste, um den Schalter an die Basis anzupassen. Trotz einiger Herausforderungen beförderte der Biplan-Simulator 36 Kinder bei seinem ersten Ausflug zum KJKA AOPA, und McKiernan war mit dem Ergebnis sehr zufrieden.
Projekte wie diese, die Schalter als Steuerungen verwenden, sind einfacher für Anfänger zu integrieren, ohne dass Programmierung erforderlich ist. Unsere Mikroantriebe bieten eine kompakte Größe, die perfekt für Prototypen oder Miniatur-Nachbildungen ähnlicher Bewegungssimulatoren geeignet ist. Ein Proof of Concept für Präsentationen kann helfen, bestimmte Hindernisse zu entdecken, die das Projekt möglicherweise vor der Umsetzung des vollwertigen Bewegungssimulators begegnen könnte.
ZUSAMMENFASSUNG
Bewegungssimulatoren gibt es in einer Vielzahl von Formen und Größen, die sie geeignet machen, um verschiedene anwendungsspezifische Szenarien zu simulieren. Geräte wie Mikrocontroller, Schalter und Motorsteuerungen werden häufig mit Linearantrieben integriert, um Bewegungssimulatoren zu ermöglichen, Bewegung so genau wie möglich nachzustellen.
Wir hoffen, dass Sie dies ebenso informativ und interessant fanden wie wir, insbesondere wenn Sie interessiert waren, wie Bewegungssimulatoren und Linearantriebe zusammenarbeiten! Wenn Sie Fragen haben oder unsere Produkte weiter besprechen möchten, zögern Sie bitte nicht, uns zu kontaktieren! Wir sind Experten auf unserem Gebiet und helfen Ihnen gerne, wo wir können.
sales@progressiveautomations.com | 1-800-676-6123