A mozgásszimulátorok kulcsfontosságú eszközök a mérnöki elemzéshez, a képzéshez, az oktatáshoz és a szórakoztatáshoz, mivel valósághűen visszaadják a mozgásban lévő dolgok érzetét. A lineáris aktuátorok népszerű megoldást jelentenek a mechanikai műveletek vezérlésére a jelentős előnyök miatt; azonban a mozgásszimulátorok számos különböző módon integrálhatják ezeket a felhasználási módokat. Ebben a cikkben néhány mozgásszimulátor példát fogunk bemutatni, hogy jobban megértsük, hogyan működnek együtt a mozgásszimulátorok és a lineáris aktuátorok.
Használati esetek
Sokféleképpen lehet megvalósítani elektromos lineáris aktuátorok mozgásszimulátorokba. Csak néhány példa említésére, aktuátorokat használtak a következő területeken található lineáris mozgás meghajtására:
- Repülésszimulátorok
- Katonai járműszimulátorok
- Vidámparki körhinták
- Vezetési/versenyzési szimulátorok
- Űrhajó-szimulátorok
- Stewart platformok
- Különböző arcade videojátékok
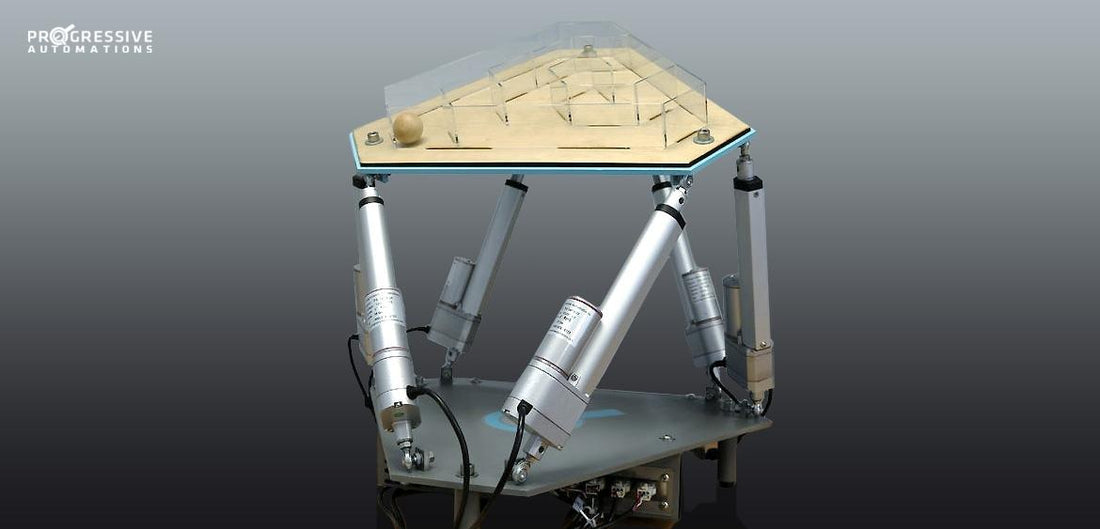
Hattengelyes platform lineáris aktuátorokkal (Stewart platform)

Büszkén támogatta a Progresszív automatizálások, az UBC Mérnöki Fizika Tanszékének Stewart platform érdekes és interaktív élményt nyújt a lineáris mozgásvezérlés, valamint a robotikában szerepet játszó fizika megismerésében.
Azáltal, hogy integráljuk a PA-14P visszacsatolású lineáris aktuátorok, a pozícióinformációk leolvashatók visszacsatoló jelek a működtető beépített részéből potenciométerekA pozícióinformációk birtokában a rendszer meg tudja állapítani, hogy a működtetők pontosan elérték-e a kívánt pozíciókat, ezáltal minimalizálva a hibákat és lehetővé téve a nagyobb ismétlési pontosságot. Bár az olyan eszközök, mint a Hall-effektus-érzékelők és a gyorsulásmérők nagyobb pontosságot eredményezhetnek, integrációs folyamatuk összetettebb, míg a potenciométeres visszacsatolási opciók elegendő pontosságot biztosítottak könnyebb integráció mellett. Emellett a PA-14P-6-35 modellek véletlenül sebességet (2,00"/mp tehermentesen) és kompakt méretet is kínáltak, ami alkalmas volt ehhez az alkalmazáshoz, amely 6 hüvelykes lökethosszt igényelt.

A LC-062 Arduino Due mikrovezérlő A hat aktuátort két MultiMoto Arduino Shielddel és a gazdaszámítógéppel egy USB soros kapcsolaton keresztül csatlakoztatja. Mivel a Multimoto paneljeink egyszerre legfeljebb négy függetlenül vezérelt csatornát tudtak kezelni, a projekthez szükséges hat lineáris aktuátort panelenként három részre osztották. Az aktuátorok mozgását ezután egy PID visszacsatolási rendszer vezérelte, a PA-14P potenciométerének bemeneti adatait használva.

Az egyedi grafikus felhasználói felület (GUI) mellett egy Leap Motion vezérlő, amely három infravörös adót és két kamerát használ, lehetővé teszi a felhasználók számára a platform teljes mozgásvezérlését egyetlen kézmozdulattal. A Stewart Platform részletes áttekintéséhez a következőket is mellékeltük: projektjelentés és GitHub linkek.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
A Stewart platformok mögött álló technológiát számos más modern mozgásszimulátorban is alkalmazzák a 6 szabadsági foka (három a pozícióhoz, három az irányhoz) miatt, ami a legmagasabb szabadsági fok, amivel egyetlen merev test rendelkezhet. Ennek egy nagyobb léptékű példája látható a Nyers HexaPod mozgásszimulátor amely hat szabadsági fokát használja ki a lehető legpontosabb és legismételhetőbb szimulációk elvégzésére.

Repülésszimulátor lineáris aktuátorokkal

Ahogy a technológia folyamatosan fejlődik, a mozgásszimulátorok fokozatosan egyre megfizethetőbbé válnak a barkácsolók számára világszerte. Ennek egy figyelemre méltó példája látható a Repülésszimulátor projekt ügyfelünk, Anthony Escalante készítette. Egyedi gyártású alkatrészek, elektronikus hardverek és programozás moduláris tervezésével Anthony egy teljesen működőképes repülési szimulátort alkotott otthonába.
Többféleképpen tervezve PA-03 és PA-04 Anthony standard lineáris aktuátorai 6 szabadságfokkal rendelkeznek, hasonlóan a korábban említett Stewart platformhoz. Mindegyikünk Standard lineáris aktuátorok megfelelő sebességgel és erőértékekkel rendelkezett ahhoz, hogy zökkenőmentesen kezelje a dőléseket, forgásokat és fordulásokat, szimulálva a valódi repülést az Anothony mozgásplatformján keresztül.

Négy kíséretében tápegységek, a vezérlőrendszer elegendő áramfelvétellel rendelkezik ahhoz, hogy beépítse a motorvezérlőket és a mikrovezérlőket, amelyek szépen el vannak helyezve a szimulátor vezérlőközpontjában.
„Igazán simán fut és könnyen karbantartható,– mondta Anthony.Gondoskodtam róla, hogy karbantartás szempontjából moduláris legyen. Az alkatrészek könnyen beszerezhetők voltak a barkácsboltokban, a fémdarabok pedig a Metal Martban voltak kaphatók és vághatók. A működtetők és a felfüggesztés könnyen cserélhető. Nincs fejfájás az állásidővel. Még a nagymamám is meg tudja csinálni.„.

Lineáris működtetők pálya mint a PA-18 és PA-08 kiváló alternatívákat kínálnak beltéri mozgásszimulátorok számára, amelyek kompakt hosszúságú megoldásokat igényeltek kihúzott és behúzott állapotban. Ez azért van, mert a pályás lineáris aktuátorok mozgástartománya a pálya előre meghatározott útvonalán belül van, ahelyett, hogy egy szabadba nyúló tengely lenne.
Kétfedelű repülőgép szimulátor gyerekeknek

A mozgásszimulátorokat szórakoztatási célokra is használják, például Kétfedelű repülőgép szimulátor gyerekeknek által EAA 485Ez a projekt az eredeti 3 tengelyes szimulátor modernizációja volt, amelyet egy Wetumpka-i (Alabama) testvérszervezettől ismerünk. John McKiernan, az EAA 485 elnöke örömmel osztja meg velünk a projektjét!
A kétfedelű repülőgép-szimulátornak 4 hüvelykes löketre volt szüksége a gördülési és bólintási tengelyben, és mivel az elfordulási tengely egy forgózsámolyon volt, a rögzített pont mozgatása növelhette vagy csökkenthette az elfordulási mozgást. A termékeinkkel kapcsolatos korábbi tapasztalatok alapján McKiernan meg tudta határozni a... PA-03 24 VDC, 200 font súlyú működtető 4 hüvelykes lökettel a megfelelő modell.
„Kevesebb mint egy nap kellett hozzá, hogy beállítsam és működőképessé tegyem a legyezőtengelyt. Ezután vettem még 3 azonos aktuátort, hogy legyen egy tartalékunk. Ahhoz, hogy a gördülés és a bólintás működjön, 4 alumínium tömböt kellett megmunkálni, hogy Heim csapágyat lehessen beszerelni. A Heim illesztésekre azért volt szükség, hogy némi axiális mozgást vegyenek fel a gördülés és a bólintás működtetésekor. Ezeket kézzel végeztem, és úgy tűnt, hogy jól működnek. Később egy új biztosítéktáblát készítettem normál lapátos biztosítékokból – minden aktuátorhoz egyet-egyet –, Hobbs-mérővel és pilótafülkével. A pilótafülkében valódi repülőgép-mérők és egy nagyon ötletes radiálmotor-hang található, amelyet egy fojtószeleppel lehet vezérelni. Rádióvezérlő szervo tesztereket használ, amelyek egy modulhoz vannak csatlakoztatva, és egy kis középső hangszórót a műszerfal mögött. Még valósághű géppuskahangot is adott, amikor megnyomtak egy gombot.„” – magyarázza McKiernan.
McKiernan tovább magyarázza: „Az eredeti kapcsolók egy rugós görgőt használtak, amely amikor a kar vagy a pedálok semleges állásban voltak, egy fenolblokkban volt, a kar vagy a kormánypedálok mozgatása pedig egy alumínium kapcsolólapra helyezte át. Nem tetszett, hogy a kar biztosította az elektromos utat, bár a fenolblokkok leválasztották az ülés alatti területet. Ezeket egy megfordított alumíniumlemezhez rögzítették, és mindegyiket a meglévő alsó eredeti kapcsolószerkezetre illesztették.„
A labda a kapcsoló középső helyzetében, semleges állásban nyugszik, és egy kar vagy pedál mozgatásával elmozdítható a görgő, illetve lenyomható a kapcsoló. Az eredetileg kerek görgős rendszeren egy kicsit több finomhangolásra volt szükség, mivel magát a kockát kellett felszeletelni, hogy a kapcsolót az alaphoz igazítsák. Néhány kihívás ellenére a kétfedelű repülőgép-szimulátor 36 gyereket repült az első alkalommal a KJKA AOPA-n, és Mckiernan nagyon elégedett volt az eredménnyel.
Az ilyen, kapcsolókat vezérlő projektek egyszerűbben integrálhatók a kezdők számára, mivel nincs szükség programozásra. Mikroaktuátorok kompakt méretet kínál, amely tökéletes prototípusok készítéséhez vagy miniatűr replikák hasonló mozgásszimulátoroké. Egy koncepcióbizonyítás, amelyet prezentációkban lehet bemutatni, segíthet feltárni bizonyos akadályokat, amelyekkel a projekt szembesülhet, mielőtt belevágna a teljes méretű mozgásszimulátor használatába.
ÖSSZEFOGLALVA
A mozgásszimulátorok sokféle formában és méretben kaphatók, ami alkalmassá teszi őket különféle alkalmazásspecifikus forgatókönyvek szimulálására. Az olyan eszközöket, mint a mikrovezérlők, kapcsolók és motorvezérlők, gyakran lineáris aktuátorokkal integrálják, hogy a mozgásszimulátorok újraalkothassák a folyamatokat. a lehető legpontosabb mozgás.
Reméljük, hogy Ön is ugyanolyan informatívnak és érdekesnek találta ezt, mint mi, különösen, ha érdekelte, hogyan működnek együtt a mozgásszimulátorok és a lineáris aktuátorok! Ha bármilyen kérdése van, vagy szeretne bővebben beszélni termékeinkről, kérjük, ne habozzon kapcsolatba lépni velünk! Szakértők vagyunk a szakmánkban, és örömmel segítünk mindenben, amiben csak tudunk.
sales@progressiveautomations.com | 1-800-676-6123