Quando implementato correttamente, il feedback posizionale può permettere a più attuatori di muoversi insieme in sincronia, utilizzare posizioni di memoria preimpostate e spostarsi con maggiore accuratezza e precisione. Sia gli encoder ottici sia i sensori ad effetto Hall sono soluzioni popolari per leggere il feedback posizionale di un motore con buona accuratezza; tuttavia, ciascuna opzione di feedback offre vantaggi diversi che possono favorire alcune applicazioni più di altre. Questo articolo confronterà gli aspetti importanti degli encoder ottici e dei sensori ad effetto Hall, come il loro funzionamento, le applicazioni più comuni e i relativi pro e contro, per aiutarti a determinare quale opzione di feedback è la migliore per le tue esigenze.
Esplorare gli encoder ottici: funzione e applicazioni

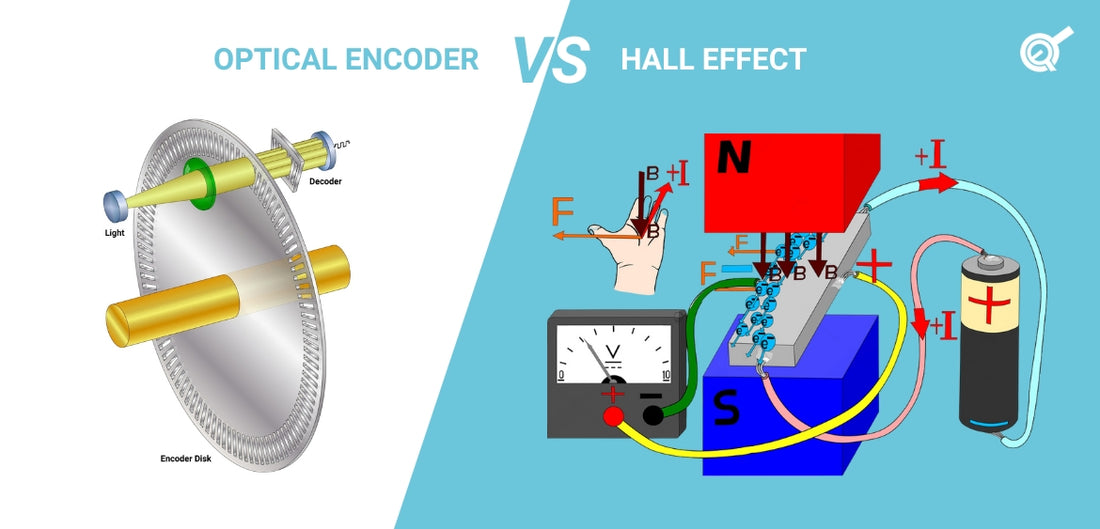
Gli encoder ottici sono un tipo di dispositivo di feedback per misurare la posizione dell'albero di un motore che utilizza fotosensori per rilevare i fasci di luce che passano attraverso le fessure di un disco interno rotante. Un fotosensore funge da ricevitore, generando un impulso elettrico ogni volta che la luce attraversa i contrassegni trasparenti di una fessura, il che nel tempo crea una forma d'onda quadra contando la sequenza di impulsi.

Contando questi impulsi, un controller esterno separato può tenere traccia di informazioni come la posizione attuale del motore, la velocità e il numero di rivoluzioni completate. Questo fornisce un feedback preciso che può essere utilizzato per controllare il movimento di un motore che aziona un attuatore lineare. Data la loro elevatissima accuratezza e velocità, gli encoder ottici sono dispositivi di feedback popolari in casi d’uso come:
- Sistemi TC (tomografia computerizzata)
- Apparecchiature da laboratorio
- Dispositivi medici
- Spettrometri
- Centrifughe

Vantaggi e limiti degli encoder ottici
Vantaggi
- Alta risoluzione: gli encoder ottici possono offrire una risoluzione molto elevata, consentendo un rilevamento di posizione preciso.
- Accuratezza: gli encoder ottici garantiscono un’accuratezza molto alta nel rilevamento della posizione, rendendoli adatti ad applicazioni che richiedono misure precise.
- Senza contatto: il rilevamento basato sulla luce non richiede contatto fisico tra l’encoder e l’elemento sensibile, riducendo l’usura e aumentando la durata degli encoder ottici.
- Alta velocità: gli encoder ottici possono operare ad alte velocità, risultando ideali per applicazioni che richiedono un rilevamento rapido della posizione senza compromettere l’accuratezza.
Svantaggi
- Sensibili ai fattori ambientali: la “linea di vista” delle sorgenti luminose degli encoder ottici può essere influenzata da polvere, sporco e altri fattori ambientali prima di raggiungere il ricevitore interno, il che può ridurne accuratezza e precisione.
- Installazione complessa: gli encoder ottici richiedono un attento allineamento e un’installazione accurata per garantire letture precise, un processo che può risultare impegnativo e richiedere tempo.
- Fragilità: rispetto ad altri tipi di meccanismi di feedback, gli encoder ottici utilizzano sottili dischi di vetro e plastiche, più fragili e soggetti a danni se sottoposti a stress meccanici o vibrazioni.
Approfondire i sensori ad effetto Hall: principi e applicazioni

Secondo la teoria dell’Effetto Hall di Edwin Hall (che lo scoprì), ogni volta che un campo magnetico viene applicato in una direzione perpendicolare al flusso di corrente elettrica in un conduttore, si induce una differenza di tensione. Questa tensione può essere utilizzata per rilevare se un sensore ad effetto Hall si trova in prossimità di un magnete. Fissando un magnete all’albero rotante di un motore, i sensori ad effetto Hall possono rilevare quando l’albero è parallelo ad essi. Utilizzando una piccola scheda elettronica, questa informazione può essere convertita in un’onda quadra, in modo simile agli encoder ottici.

È comune che le schede a effetto Hall abbiano 2 sensori, generando un’uscita in quadratura in cui due segnali salgono e scendono man mano che il motore elettrico ruota, con una differenza di fase di 90° tra loro. Contando questi impulsi e vedendo quale arriva per primo, è possibile determinare la direzione di rotazione del motore. La frequenza di questi impulsi differisce nella nostra gamma di diversi attuatori lineari elettrici su ordinazione; tuttavia, il nostro PA-04-HS offre feedback da sensori ad effetto Hall pronto all’uso. Una buona accuratezza, combinata con la robustezza tipica dei dispositivi ad effetto Hall, li rende popolari per casi d’uso come:
- Applicazioni automobilistiche
- Scrivanie ergonomiche per casa e ufficio
- Inseguimento solare ed energie rinnovabili
- Applicazioni marine
- Sistemi di sollevamento industriali/pesanti

Punti di forza e debolezze dei sensori ad effetto Hall
Vantaggi
- Rilevamento senza contatto: i sensori ad effetto Hall non richiedono il contatto fisico con il proprio elemento sensibile, riducendo l’usura e aumentando la durata del dispositivo.
- Robustezza: i sensori ad effetto Hall sono più robusti e resistenti a fattori ambientali come polvere, sporco e vibrazioni, aumentando l’affidabilità complessiva in applicazioni con condizioni operative gravose.
- Installazione semplice: i sensori ad effetto Hall sono relativamente facili da installare e richiedono meno allineamento rispetto agli encoder ottici.
- Costo inferiore: in generale, i sensori ad effetto Hall hanno un prezzo più accessibile rispetto agli encoder ottici.
Svantaggi
- Risoluzione inferiore: i sensori ad effetto Hall hanno tipicamente una risoluzione inferiore rispetto agli encoder ottici, il che può limitarne l’idoneità per applicazioni che richiedono precisione molto elevata.
- Velocità limitata: i sensori ad effetto Hall presentano maggiori limitazioni in termini di velocità massima alla quale possono rilevare accuratamente la posizione.
- Interferenze magnetiche: i magneti interni dei sensori ad effetto Hall possono essere influenzati da interferenze magnetiche esterne, con impatti su accuratezza e affidabilità del feedback in alcuni ambienti.
- Sensibilità alla temperatura: le proprietà magnetiche dei sensori ad effetto Hall possono variare con la temperatura, rendendo necessaria un’ulteriore compensazione o calibrazione in applicazioni con ampie variazioni dell’intervallo di temperatura.
IN SINTESI
Gli encoder ottici e i sensori ad effetto Hall sono scelte popolari per leggere il feedback posizionale; è però fondamentale conoscerne le differenze, in particolare i vantaggi e gli svantaggi. Quando si sceglie tra encoder ottici e sensori ad effetto Hall, è importante trovare il giusto equilibrio tra accuratezza, durata, complessità e fascia di prezzo che meglio soddisfi le tue necessità.
In qualità di uno dei principali fornitori di attuatori lineari elettrici, Progressive Automations offre flessibilità, qualità, supporto ed esperienza sul campo ai massimi livelli per soddisfare tutte le tue esigenze. Se hai altre domande su ciò che possiamo offrire, non esitare a contattarci! Siamo esperti in ciò che facciamo e vogliamo assicurarti di trovare le migliori soluzioni per la tua applicazione.
sales@progressiveautomations.com | 1-800-676-6123