
I motori in corrente continua (DC) sono ampiamente utilizzati sia nelle applicazioni industriali sia in casa per progetti personali. Uno degli aspetti fondamentali nella scelta di un motore DC è decidere se aggiungere qualche forma di Feedback al motore.
Che cos'è il Feedback?
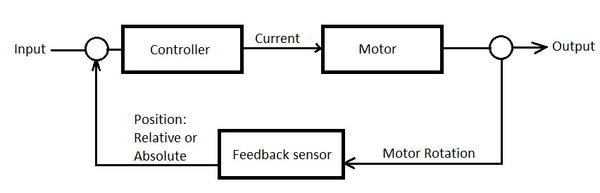
Per Feedback si intende qualsiasi informazione che un controllore può utilizzare per monitorare un processo. Nei motori DC, il Feedback è solitamente raccolto sotto forma di posizione, numero di rotazioni e direzione di rotazione. Queste informazioni possono poi essere inviate al controllore per misurare la velocità angolare e la posizione dell'albero del motore; questo è comunemente noto come una forma di “controllo ad anello chiuso”.
Nei casi d'uso più sofisticati, il Feedback dal motore e da altre fonti può essere gestito per ottenere non solo velocità e posizione precise, ma anche la risposta dinamica, la sincronizzazione e la stabilità desiderate.
Vantaggi dell'uso del Feedback
Se implementato correttamente, il Feedback può permettere ai macchinari di operare in modo più efficiente e con maggiore ripetibilità. Il Feedback può consentire al tuo meccanismo di regolare automaticamente l'uscita per mantenere la stabilità, ridurre le variazioni e minimizzare gli errori senza necessità di intervento umano.
Un esempio semplice di buon sistema di controllo con Feedback è il termostato. Il controllore misura la temperatura dell'ambiente e regola l'uscita degli elementi riscaldanti per mantenere una temperatura impostata.
Uno dei principali vantaggi del Feedback nei motori DC è il controllo PID. PID indica un meccanismo di controllo ad anello ampiamente utilizzato nell'industria per compensare automaticamente gli errori nella velocità o nella posizione della macchina.
Il Feedback può anche essere utilizzato per implementare meccanismi fail-safe e per diagnosticare la tua applicazione. Ad esempio, se i tuoi attuatori lineari dovrebbero muoversi in sincronia ma uno è in ritardo, c'è qualcosa che non va. Il sistema può quindi arrestare il movimento di entrambi gli attuatori per prevenire danni o ribaltamenti.
Tipi di sensori di Feedback per motori DC
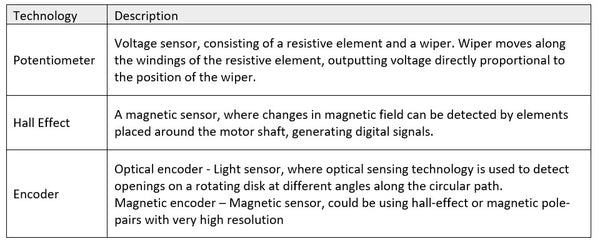
I tipi di Feedback più comuni per i motori DC sono potenziometri, sensori a effetto Hall ed encoder. Per quanto riguarda precisione e accuratezza, tutti e tre possono essere comparabili e sono molto efficaci con la tecnologia moderna. Le differenze emergono quando si considerano requisiti specifici di prestazione come durata, fattori ambientali, interferenze elettromagnetiche e prestazioni in temperatura.
Potenziometro
Il principale vantaggio di questo tipo di Feedback è la sua semplicità. Il potenziometro, di fatto, trasforma un normale motore DC in un servomotore, consentendo un controllo preciso del movimento e/o della velocità. I potenziometri forniscono informazioni dirette sulla posizione angolare dell'albero del motore. Di conseguenza, quando il sistema perde alimentazione, il potenziometro può mantenere le informazioni di posizione senza necessità di effettuare l'“homing”. Inoltre, poiché i potenziometri in sostanza sono partitori di tensione con una grande resistenza, gestiscono bene le interferenze elettromagnetiche (EMI).
Ci sono anche degli svantaggi nell'uso dei potenziometri. I sensori a potenziometro richiedono il contatto per effettuare le misure, il che significa che sono meno durevoli e hanno una vita utile limitata rispetto ad altre forme di Feedback. I potenziometri sono una forma di misura relativamente lenta, sia per la necessità di contatto sia perché potrebbero richiedere un convertitore analogico-digitale prima che venga stabilito il controllo di Feedback. Infine, i potenziometri nei motori impongono un limite al numero di rotazioni che un albero può compiere. Le applicazioni con Feedback da potenziometro devono assicurarsi che vi sia un modo per prevenire il superamento della corsa.
Effetto Hall
I sensori a effetto Hall sono un pilastro del Feedback del motore perché sono affidabili, precisi e hanno una lunga vita utile. A differenza del potenziometro, i sensori a effetto Hall non necessitano di contatto, quindi sono utili in ambienti gravosi, altamente resistenti all'usura e affidabili in condizioni di forti urti. I sensori a effetto Hall forniscono impulsi elettrici quando il magnete è allineato con l'elettronica di rilevamento. Per questo motivo sono adatti ad applicazioni ad alta velocità e permettono di pre-programmare determinati angoli dell'albero del motore.
Uno degli svantaggi dei sensori a effetto Hall è che possono fornire solo informazioni di posizione relativa. Ciò significa che ogni volta che il sistema perde alimentazione, i sensori a effetto Hall devono essere portati in una posizione nota e reimpostati. Inoltre, i cavi dei sensori a effetto Hall che trasportano le informazioni possono essere vulnerabili a interferenze elettromagnetiche e rumore. Per questo motivo, i segnali a volte possono andare persi, o possono essere generati falsi segnali, il che significa che le informazioni sulla posizione possono “derivare” nel tempo.
Encoder
Esistono encoder ottici e magnetici. Gli encoder magnetici sono probabilmente i sensori complessivamente migliori per generare segnali di Feedback. Sono senza contatto, come i sensori a effetto Hall, il che significa che hanno una vita utile molto elevata. Sono molto veloci e in genere hanno una risoluzione molto alta. Gli encoder magnetici non sono inoltre influenzati da polvere o altre particelle e possono essere impiegati in una varietà di ambienti.
Gli encoder sono in genere costosi e richiedono elettronica dedicata che può essere difficile da configurare e controllare. Aggiungere complessità non necessaria al progetto non è sempre una buona idea perché aumenta anche il numero di potenziali modalità di guasto.
Sono disponibili diverse forme di Feedback per i progettisti e, con i progressi della tecnologia moderna, possono essere rese grossomodo equivalenti in termini di accuratezza. Quando si sceglie il tipo di Feedback, è necessario considerare le esigenze prestazionali della propria applicazione e comprendere i vantaggi delle tecnologie con cui si sta lavorando.