



Bewegingssimulatoren zijn cruciale hulpmiddelen voor ingenieursanalyses, training, onderwijs en entertainment, omdat ze een realistisch gevoel van beweging nabootsen. Lineaire actuatoren zijn een populaire oplossing om mechanische processen aan te drijven dankzij de aanzienlijke voordelen die ze bieden; bewegingssimulatoren kunnen ze echter op veel verschillende manieren integreren voor uiteenlopende toepassingen. In dit artikel behandelen we enkele voorbeelden van bewegingssimulatoren om beter te begrijpen hoe bewegingssimulatoren en lineaire actuatoren samenwerken.
Use‑cases
Er zijn veel manieren om elektrische lineaire actuatoren te implementeren in bewegingssimulatoren. Om slechts enkele voorbeelden te noemen, zijn actuatoren gebruikt om de lineaire beweging aan te drijven in:
- Flugsimulatoren
- Simulators voor militaire voertuigen
- Attracties in pretparken
- Rij-/racingsimulatoren
- Ruimtevaartuig‑simulatoren
- Stewart‑platforms
- Diverse arcade‑videogames
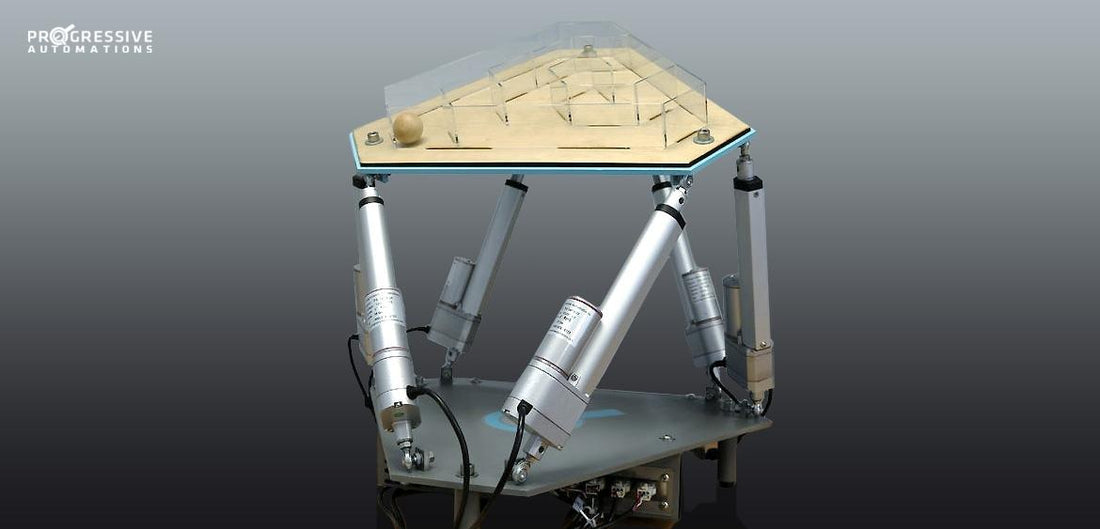
Zesassig platform met lineaire actuatoren (Stewart‑platform)

Met trots gesponsord door Progressive Automations biedt het Stewart‑platform van de afdeling Engineering Physics van UBC een interessante en interactieve ervaring om te leren over besturing van lineaire beweging én de natuurkunde die in robotica een rol speelt.
Door onze PA-14P lineaire actuatoren met terugkoppeling te integreren, kan positiebepaling worden uitgelezen via terugkoppelingssignalen van de ingebouwde potentiometers van de actuator. Met positiebepaling kan een systeem controleren of de actuatoren de vereiste posities nauwkeurig hebben bereikt, om fouten te minimaliseren en een hogere herhaalbaarheid mogelijk te maken. Hoewel apparaten zoals Hall‑effectsensoren en versnellingsmeters een hogere nauwkeurigheid kunnen bieden, is hun integratie complexer, terwijl de potentiometer‑terugkoppeling voldoende nauwkeurig en eenvoudiger te integreren is. Bovendien boden de PA-14P-6-35‑modellen ook een snelheid (2.00"/sec zonder belasting) en een compact formaat die geschikt waren voor deze toepassing met een Slaglengte van 6”.

De LC-062 Arduino Due microcontroller koppelt de zes actuatoren samen met twee MultiMoto Arduino‑shields en met de host‑pc via een USB‑seriële verbinding. Omdat onze Multimoto‑borden maximaal vier onafhankelijk aangestuurde kanalen tegelijk aankonden, werden de zes voor het project benodigde lineaire actuatoren verdeeld tot drie per bord. De bewegingen van de actuatoren werden vervolgens geregeld via een PID‑terugkoppelingssysteem dat de potentiometerwaarden van de PA-14P als ingangen gebruikte.

Samen met de aangepaste grafische gebruikersinterface (GUI) maakt een Leap Motion‑controller met drie IR‑emitters en twee camera’s het mogelijk om het platform volledig met een handbeweging te besturen. Voor een diepgaande uitleg over het Stewart‑platform hebben we het projectrapport en GitHub‑links toegevoegd.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
De technologie achter Stewart‑platforms wordt gebruikt in veel moderne bewegingssimulatoren dankzij de 6 vrijheidsgraden (drie voor positie, drie voor richting) — het maximale aantal vrijheidsgraden dat één star lichaam kan hebben. Een grootschalig voorbeeld hiervan is de Cruden HexaPod Motion Simulator, die zijn zes vrijheidsgraden benut om de meest nauwkeurige en herhaalbare simulaties mogelijk te maken.

Flugsimulator met lineaire actuatoren

Naarmate technologie vordert, worden bewegingssimulatoren geleidelijk betaalbaarder voor doe‑het‑zelfmakers over de hele wereld. Een opmerkelijk voorbeeld is het flugsimulatorproject van onze klant Anthony Escalante. Met zijn modulaire ontwerp van op maat gemaakte componenten, elektronische hardware en programmering creëerde Anthony een volledig functionerende flight‑motion‑simulator voor thuis.
Ontworpen met meerdere PA-03 en PA-04 standaard lineaire actuatoren, heeft Anthony’s ontwerp 6 vrijheidsgraden, vergelijkbaar met het eerder genoemde Stewart‑platform. Elk van onze standaard lineaire actuatoren had voldoende Snelheid en krachtwaarden om hellingen, rotaties en bochten soepel aan te sturen voor het simuleren van echte vluchtbewegingen via Anthony’s bewegingsplatform.

In combinatie met vier voedingen heeft het besturingssysteem voldoende stroomopname om de motorsturingen en microcontrollers te integreren, die netjes zijn ondergebracht in de control hub van de simulator.
“Hij draait heel soepel en is eenvoudig te onderhouden,” zei Anthony. “Ik heb ervoor gezorgd dat hij modulair is voor onderhoud. Onderdelen waren makkelijk verkrijgbaar bij bouwmarkten en metalen stukken zijn gekocht en op maat gesneden bij Metal Mart. Actuatoren en ophanging zijn eenvoudig te vervangen. Geen hoofdpijn door stilstand. Mijn grootmoeder kan het zelfs zelf doen“.

Track‑lineaire actuatoren zoals de PA-18 en PA-08 zijn uitstekende alternatieven voor bewegingssimulatoren binnenshuis die oplossingen vereisen met een compacte lengte in zowel uitgeschoven als ingetrokken toestand. Dit komt doordat track‑lineaire actuatoren een bewegingsbereik hebben dat is ingesloten in het vooraf gedefinieerde pad van de rail, in plaats van een as die in de open lucht uitsteekt.
Tweedekker‑simulator voor kinderen

Bewegingssimulatoren worden ook gebruikt voor entertainment, zoals de tweedekker‑simulator voor kinderen van EAA 485. Dit project was een modernisering van de oorspronkelijke 3‑assige simulator van een zusterafdeling in Wetumpka, AL. John McKiernan, de voorzitter van EAA 485, deelt zijn project graag met ons!
De tweedekker‑simulator had een Slaglengte van 4” nodig voor de rol‑ en knikas, en omdat de gier‑as op een draaitafel zat, kon het verplaatsen van het aangrijpingspunt de gierbeweging vergroten of verkleinen. Met eerdere ervaring met onze producten kon McKiernan de PA-03 24 VDC, 200 lb actuator met een Slaglengte van 4” als geschikt model bepalen.
“Het kostte minder dan een dag om hem af te stellen en de gier‑as aan de praat te krijgen. Daarna kocht ik nog 3 identieke actuatoren als reserve. Om rol en knik te realiseren moesten 4 aluminium blokken worden gefreesd om een Heim‑lager te kunnen monteren. De Heim‑gewrichten waren nodig om enige axiale beweging in de rol‑ en knikaandrijving op te nemen. Deze zijn met de hand gemaakt en leken prima te werken. Later is een nieuw zekeringenpaneel gemaakt met normale vlakstekerzekeringen, één voor elke actuator, Hobbs‑meter en cockpit. De cockpit heeft echte vliegtuigmeters en een zeer slimme radiaalmotor‑sound die via een throttle wordt bediend. Er worden RC‑servotesters gebruikt die zijn aangesloten op een module en een kleine centerspeaker achter het instrumentenpaneel. Er was zelfs een realistisch machinegeweer‑geluid wanneer op een knop werd gedrukt,” legt McKiernan uit.
McKiernan vervolgt: “De oorspronkelijke schakelaars gebruikten een veerrol die, wanneer de stick of pedalen in neutraal stonden, in een fenolisch blok zat, en het bewegen van de stick of roerpedalen verplaatste deze naar een aluminium schakelaarplaat. Ik had er geen bezwaar tegen dat de stick het elektrische pad verzorgde, hoewel fenolische blokken het gebied onder de stoel isoleerden. Deze werden op een omgekeerde aluminium plaat gemonteerd en elk aangepast op de bestaande onderste originele schakelaarstructuur.”
De kogel rust in de middenpositie van de schakelaar in neutraal, en bij een beweging van stick of pedalen beweegt de rol en wordt de schakelaar ingedrukt. Het rollen‑systeem, dat oorspronkelijk rond was, vergde wat extra afstelling omdat het eigenlijke blok moest worden ingesneden om de schakelaar op de basis aan te passen. Ondanks enkele uitdagingen “vloog” de tweedekker‑simulator 36 kinderen tijdens de eerste demo bij de KJKA AOPA, en McKiernan was zeer tevreden over het resultaat.
Projecten zoals deze, die schakelaars als bediening gebruiken, zijn eenvoudiger te integreren voor beginners, zonder programmeren. Onze micro‑actuatoren bieden een compact formaat dat perfect is voor het maken van prototypes of miniatuurreplica’s van vergelijkbare bewegingssimulatoren. Een proof‑of‑concept voor presentaties kan helpen om bepaalde obstakels te ontdekken waar het project tegenaan kan lopen voordat de volwaardige bewegingssimulator wordt aangepakt.
SAMENVATTING
Bewegingssimulatoren zijn er in uiteenlopende vormen en maten, waardoor ze geschikt zijn om verschillende toepassingsspecifieke scenario’s te simuleren. Apparaten zoals microcontrollers, schakelaars en motorsturingen worden vaak geïntegreerd met lineaire actuatoren om bewegingssimulatoren beweging zo nauwkeurig mogelijk te laten nabootsen.
We hopen dat u dit net zo informatief en interessant vond als wij, vooral als u benieuwd was hoe bewegingssimulatoren en lineaire actuatoren samenwerken! Als u vragen heeft of onze producten verder wilt bespreken, neem dan gerust contact met ons op! Wij zijn experts in ons vak en helpen u graag waar we kunnen.
sales@progressiveautomations.com | 1-800-676-6123