Pohybové simulátory sú kľúčovým prínosom pre inžinierske analýzy, tréning, vzdelávanie aj zábavu, pretože znovu vytvárajú realistický pocit pohybu. Lineárne aktuátory sú obľúbeným riešením na pohon mechanických operácií vďaka výrazným výhodám, ktoré ponúkajú; pohybové simulátory ich však môžu integrovať rôznymi spôsobmi pre široké spektrum použitia. V tomto článku si ukážeme niekoľko príkladov pohybových simulátorov, aby sme lepšie pochopili, ako spolu pohybové simulátory a lineárne aktuátory fungujú.
Použitia
Existuje mnoho spôsobov, ako implementovať elektrické lineárne aktuátory do pohybových simulátorov. Len pre zopár príkladov – aktuátory sa použili na vytvorenie lineárneho pohybu v:
- leteckých simulátoroch
- simulátoroch vojenských vozidiel
- atrakciách v zábavných parkoch
- jazdných/závodných simulátoroch
- simulátoroch kozmických lodí
- Stewartových platformách
- rôznych arkádových videohrách
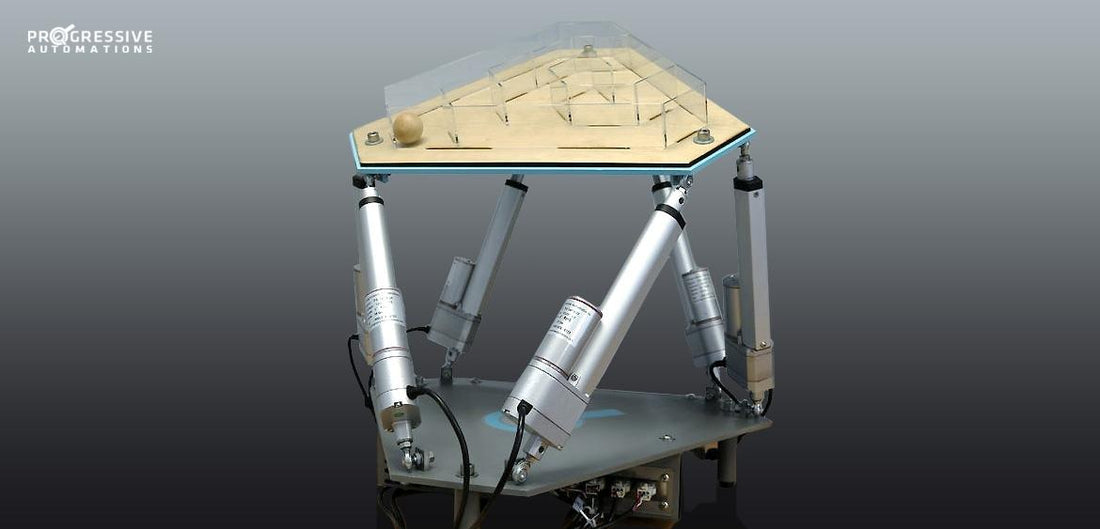
Šesťosová platforma s lineárnymi aktuátormi (Stewartova platforma)

S hrdosťou sponzorované spoločnosťou Progressive Automations, Stewartova platforma Katedry inžinierskej fyziky UBC ponúka zaujímavý a interaktívny spôsob, ako sa učiť o riadení lineárneho pohybu a fyzike, ktorá súvisí s robotikou.
Integráciou našich PA-14P lineárnych aktuátorov so spätnou väzbou možno čítať informáciu o polohe cez signály spätnej väzby z integrovaných potenciometrov aktuátora. Mať informáciu o polohe umožňuje systému určiť, či aktuátory presne dosiahli požadované polohy, minimalizovať chyby a zvýšiť opakovateľnosť. Hoci zariadenia ako snímače Hallovho efektu a akcelerometre môžu priniesť vyššiu presnosť, ich integrácia je zložitejšia, zatiaľ čo spätná väzba z potenciometra poskytla dostatočnú presnosť s jednoduchšou integráciou. Okrem toho modely PA-14P-6-35 ponúkli aj Rýchlosť (2.00"/sec bez zaťaženia) a kompaktné rozmery vhodné pre túto aplikáciu so zdvihom 6".

LC-062 Arduino Due mikrokontrolér prepája šesť aktuátorov spolu s dvoma MultiMoto Arduino shieldmi a s hostiteľským PC cez sériové pripojenie USB. Keďže naše dosky Multimoto dokázali naraz obslúžiť maximálne štyri nezávisle riadené kanály, šesť lineárnych aktuátorov potrebných pre projekt sa rozdelilo na tri na dosku. Pohyby aktuátorov sa potom riadili cez PID spätnoväzbový systém s použitím hodnôt z potenciometrov PA-14P ako vstupov.

Spolu s vlastným grafickým používateľským rozhraním (GUI) umožňuje ovládač Leap Motion s troma IR vysielačmi a dvoma kamerami používateľom plnú kontrolu pohybu platformy mávnutím ruky. Pre podrobný prehľad Stewartovej platformy prikladáme projektovú správu a odkazy na GitHub.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
Technológia za Stewartovými platformami sa používa aj v mnohých moderných pohybových simulátoroch vďaka 6 stupňom voľnosti (tri pre polohu, tri pre smer), čo je najvyšší počet stupňov voľnosti, aký môže mať jeden tuhý teleso. Vo väčšom meradle to vidno na Cruden HexaPod Motion Simulator, ktorý využíva svojich šesť stupňov voľnosti na čo najpresnejšie a najopakovateľnejšie simulácie.

Letový simulátor s lineárnymi aktuátormi

Ako technológie napredujú, pohybové simulátory sa postupne stávajú dostupnejšími pre domácich tvorcov po celom svete. Výrazným príkladom je projekt letového simulátora nášho zákazníka Anthonyho Escalanteho. Vďaka modulárnemu dizajnu z vlastných komponentov, elektroniky a programovania vytvoril Anthony plne funkčný letový pohybový simulátor pre svoj domov.
Navrhnutý s viacerými PA-03 a PA-04 štandardnými lineárnymi aktuátormi, Anthonyho dizajn sa môže pochváliť 6 stupňami voľnosti, podobne ako spomínaná Stewartova platforma. Každý z našich štandardných lineárnych aktuátorov mal dostatočnú Rýchlosť a silové hodnoty, aby hladko zvládal náklony, rotácie a zatáčanie pri simulácii skutočného letu cez Anthonyho pohybovú platformu.

V sprievode štyroch napájacích zdrojov má riadiaci systém dostatočný odber Prúdu na integráciu ovládačov motorov a mikrokontrolérov, ktoré sú úhľadne uložené v riadiacom uzle simulátora.
„Beží to naozaj hladko a jednoducho sa udržiava,“ povedal Anthony. „Zabezpečil som modulárnosť kvôli údržbe. Náhradné diely boli ľahko dostupné v hobby marketoch a kovové diely som kúpil a nechal narezať v Metal Mart. Aktuátory a zavesenie sa dajú ľahko vymeniť. Žiadne starosti s prestojmi. Dokonca to zvládne aj moja stará mama“.

Koľajnicové lineárne aktuátory ako PA-18 a PA-08 sú vynikajúcou alternatívou pre interiérové pohybové simulátory, ktoré vyžadujú riešenia s kompaktnou dĺžkou v zasunutej aj vysunutej polohe. Je to preto, že koľajnicové lineárne aktuátory majú rozsah pohybu uzavretý v preddefinovanej dráhe koľajnice namiesto toho, aby hriadeľ vystupoval do voľného priestoru.
Simulátor dvojplošníka pre deti

Pohybové simulátory sa používajú aj na zábavné účely, napríklad simulátor dvojplošníka pre deti od EAA 485. Tento projekt modernizoval pôvodný 3-osový simulátor známy zo sesterskej pobočky vo Wetumpke, AL. John McKiernan, prezident EAA 485, sa s nami rád podelil o svoj projekt!
Simulátor dvojplošníka potreboval zdvih 4" v osiach rolovania a klesania; keďže os vybočenia bola na točni, presunutie pripojeného bodu mohlo zvýšiť alebo znížiť pohyb v osi vybočenia. Vďaka predchádzajúcim skúsenostiam s našimi produktmi vedel McKiernan určiť, že PA-03 24 VDC, 200 lb aktuátor so zdvihom 4" je vhodným modelom.
„Trvalo to menej než deň, kým sme to doladili a rozbehli os vybočenia. Potom som kúpil ďalšie 3 rovnaké aktuátory, aby sme mali náhradný. Aby fungovalo rolovanie a klesanie, bolo potrebné vyrobiť 4 hliníkové bloky, aby sa dalo nainštalovať ložisko Heim. Kĺby Heim boli nutné na kompenzáciu axiálneho pohybu v akcii rolovania a klesania. Tieto časti boli vyrobené ručne a zdalo sa, že fungujú výborne. Neskôr bol vyrobený nový poistkový panel s bežnými plochými poistkami – jedna pre každý aktuátor, počítadlo Hobbs a kokpit. Kokpit má skutočné letecké prístroje a veľmi šikovný zvuk hviezdicového motora ovládaný plynom. Používa RC testery serv pripojené k modulu a malému stredovému reproduktoru za prístrojovou doskou. Mal dokonca realistický zvuk guľometu pri stlačení tlačidla,“ vysvetľuje McKiernan.
McKiernan ďalej uvádza: „Pôvodné spínače používali pružinovú rolku, ktorá bola pri neutrálnej polohe knipla alebo pedálov v fenolovom bloku a pohyb knipla či smerových pedálov ju presúval na hliníkovú spínaciu platňu. Nepáčilo sa mi, že knipel tvoril elektrickú cestu, hoci fenolové bloky izolovali priestor pod sedadlom. Tieto sa pripevnili na obrátenú hliníkovú platňu a každá sa prispôsobila cez existujúcu spodnú pôvodnú spínaciu štruktúru.”
Guľa spočíva v stredovej polohe spínača v neutrálnej polohe a pohybom knipla alebo pedála sa rolka posunie a stlačí spínač. Systém rolky, pôvodne okrúhly, si vyžiadal viac doladenia, pretože skutočný blok bolo potrebné upraviť, aby sa spínač prispôsobil základni. Napriek niekoľkým výzvam simulátor dvojplošníka pri svojom prvom výjazde na KJKA AOPA „odviezol“ 36 detí a McKiernan bol s výsledkom veľmi spokojný.
Takéto projekty, ktoré používajú spínače ako ovládacie prvky, sa začiatočníkom integrujú jednoduchšie a nevyžadujú programovanie. Naše mikroaktuátory ponúkajú kompaktné rozmery, ideálne na prototypy alebo miniatúrne repliky podobných pohybových simulátorov. Dôkaz konceptu na prezentácie môže pomôcť odhaliť prekážky, na ktoré môže projekt naraziť ešte pred realizáciou plnohodnotného simulátora.
V ZHRNUTÍ
Pohybové simulátory prichádzajú v rôznych tvaroch a veľkostiach, vďaka čomu sú vhodné na simuláciu rôznych scenárov špecifických pre danú aplikáciu. Zariadenia ako mikrokontroléry, spínače a ovládače motorov sa bežne integrujú s lineárnymi aktuátormi, aby pohybové simulátory dokázali čo najvernejšie znovu vytvárať pohyb.
Dúfame, že to pre vás bolo rovnako informatívne a zaujímavé ako pre nás – najmä ak vás zaujímalo, ako spolu pohybové simulátory a lineárne aktuátory fungujú! Ak máte otázky alebo si želáte naše produkty prebrať podrobnejšie, neváhajte nás kontaktovať! Sme odborníci v tom, čo robíme, a radi vám pomôžeme, ako len budeme môcť.
sales@progressiveautomations.com | 1-800-676-6123